
モーター




Home >
Raspberry Pi Zero W 単体でラジコンカー自作
前回Raspberry Pi Zero Wでサーボモータを制御してみてラズパイでなにかしらを制御するのはシンドいなぁという感想を得たのですが。。。デジタル信号制御なら問題ないだろということで、I2C入力のモータドライバでラジコン作りました。 https://homemadegarbage.com/...
Raspberry Pi / 電子工作 2017.9.23 お父ちゃん 
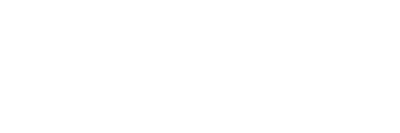
ESP32 と Blynk と 円形ロボットシャーシキット と
かわいい円形ロボットシャーシキットをAdafruitで購入したので、ESP32載っけて Blynk でWiFiラジコンつくりました♪ 構成 部品 BLE、WiFi内蔵マイコンボード ESP32-DevKitC [amazonjs asin="B06XWP81GP" locale...
電子工作 2017.9.17 お父ちゃん
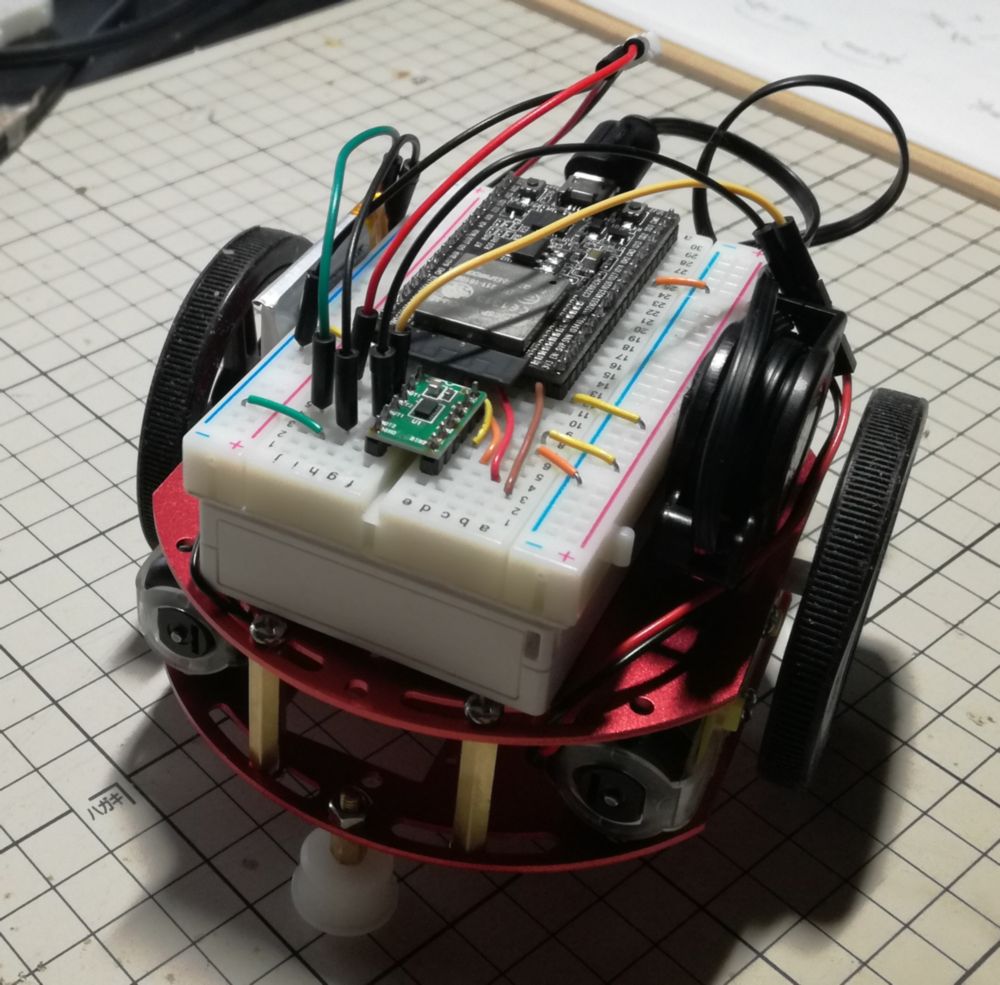
circuito.ioでブレッドボーディング
circuito.ioというサービスを使用して風船膨らまし機を作りました! circuito.ioは使用するマイコンと部品を選ぶと自動的に配線図とテストプログラムを生成してくれるwebサービスです。 手順 こちらから"Let's Go!"をクリック 使用する部品を...
電子工作 2017.4.26 お父ちゃん
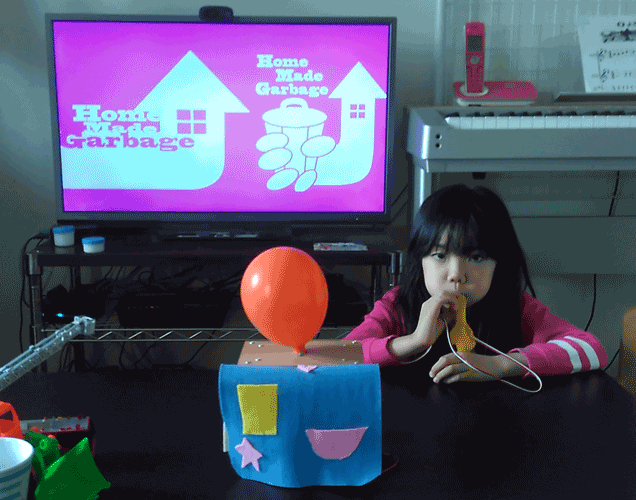
Blynk で BLE 制御ラジコン!
BlynkがBLE対応(まだベータ版)したので、今回はBLE制御ラジコンしてみました♪ Blynk制御BLEトレインについてはこちら https://homemadegarbage.com/blynk-ble-train01Blynk制御LED目ん玉についてはこちら https://homemade...
電子工作 2016.9.25 お父ちゃん