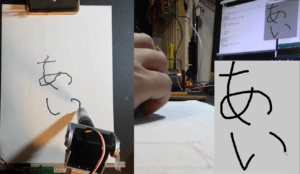
Processing で制御 ーロボットアーム自作への道3ー
さて前回は逆運動学によって、ロボットアームの座標からサーボの角度を算出して制御を楽しみました。 そうなるとコントローラでリアルタイムに動かしたくなるのがヒトというものです。 ここではProcessingを用いてマウスでの … 続きを読む Processing で制御 ーロボットアーム自作への道3ー
埋め込むにはこの URL をコピーして WordPress サイトに貼り付けてください
埋め込むにはこのコードをコピーしてサイトに貼り付けてください