SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
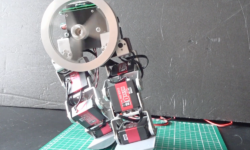
前回はシリアルサーボLX-244で構築した足の形状を検討し、遠隔で足の位置を手入力で指定しながら足を交差させての一歩を踏み出すことができました。 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1 … 続きを読む SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
埋め込むにはこの URL をコピーして WordPress サイトに貼り付けてください
埋め込むにはこのコードをコピーしてサイトに貼り付けてください