GODZILLA
Home >
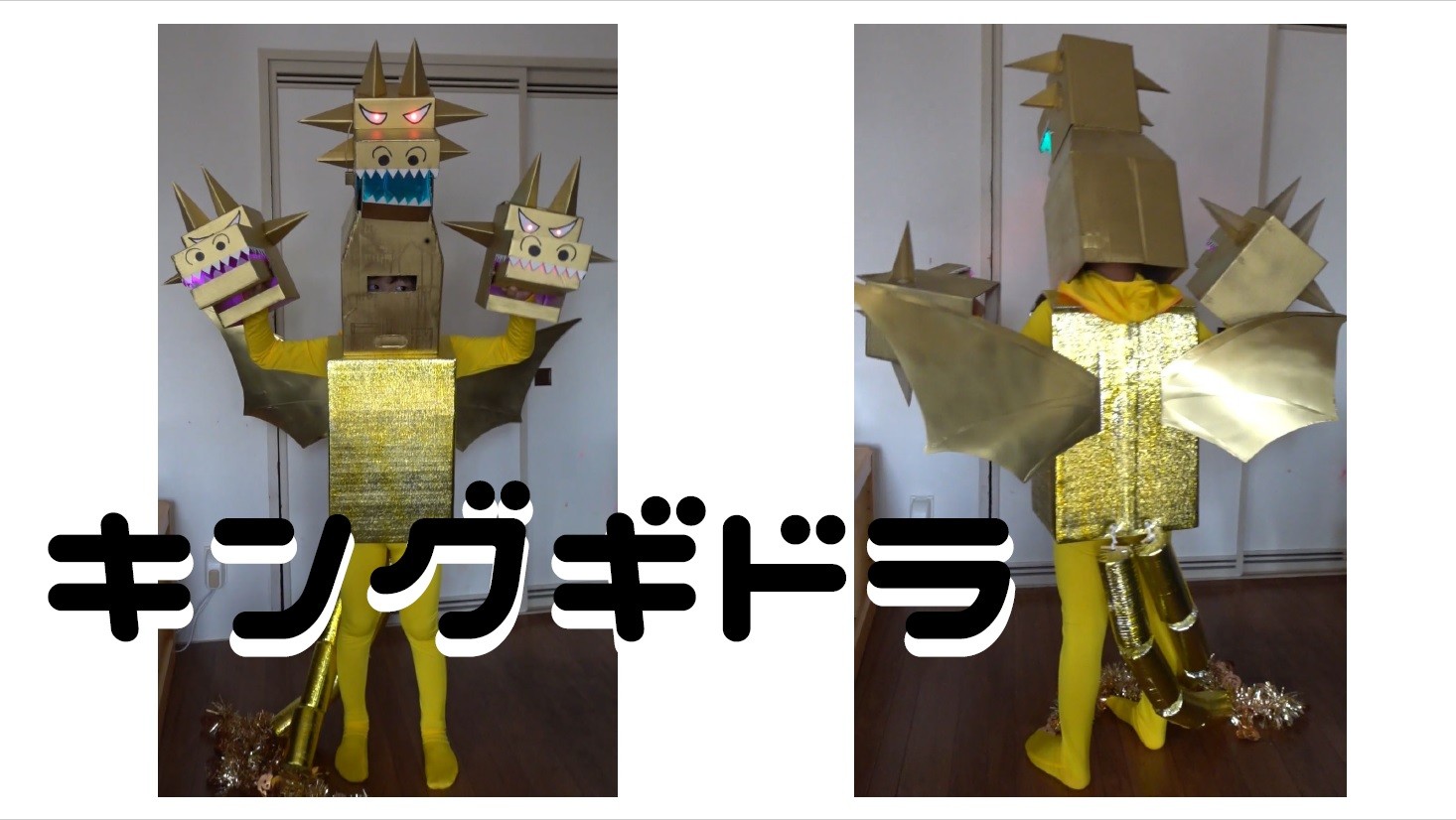
ダンボール キングギドラ コスプレ衣装の製作
去年はゴジラのコスプレでハロウィンパレードに参加して楽しんだ長男くん https://homemadegarbage.com/godzilla/ 今年も半年以上前からハロウィンに どんな格好するかをいつも考えていたのですが。。。 残念ながら今年はハロウィンイベントが中止。。。 それでもずーっ...
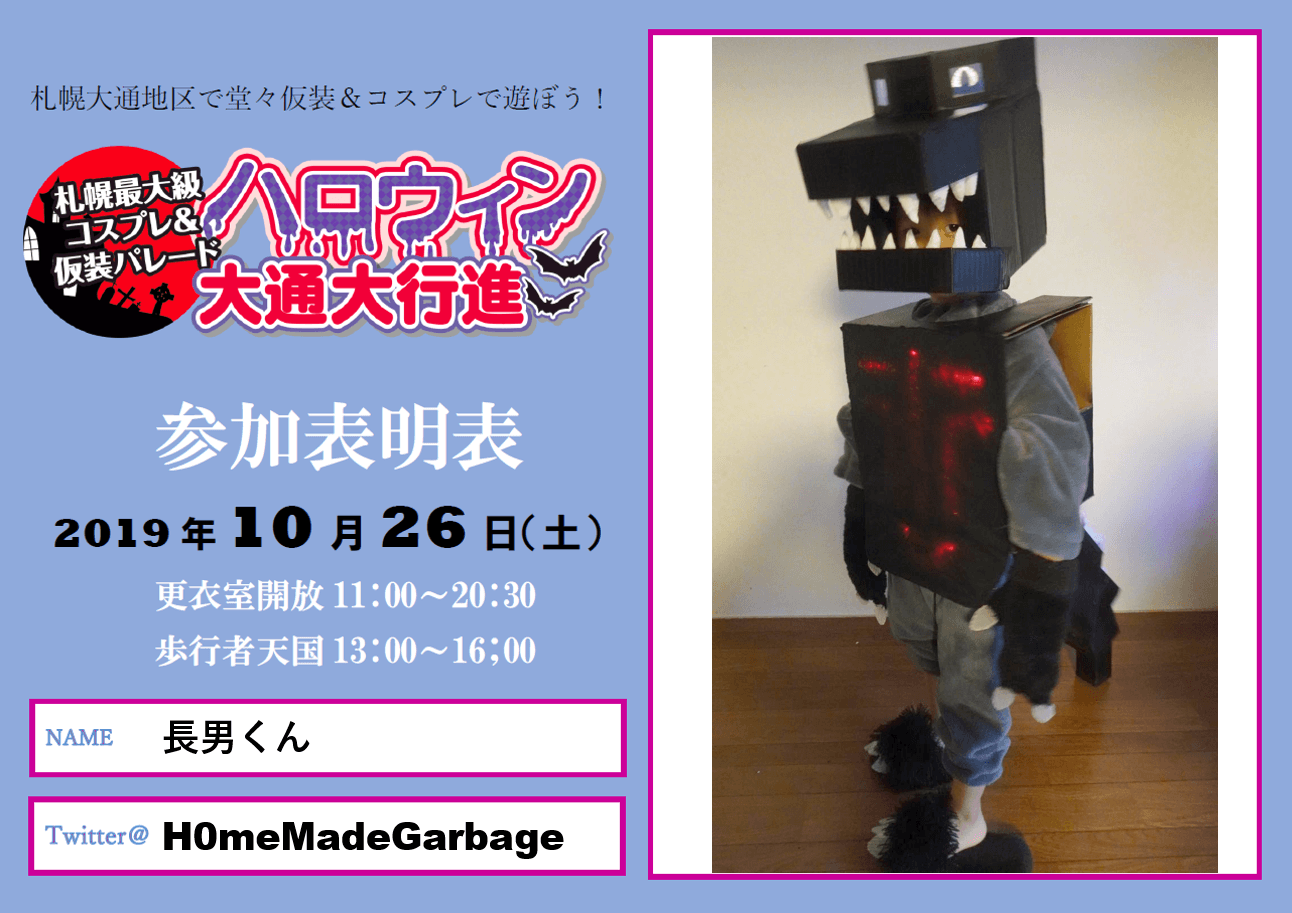
ダンボール ゴジラ コスプレ衣装の製作
今年のハロウィンは長男くんが恐竜になりたいというので、せっかくなら背びれや胸がオドロオドロしく光るゴジラがいいのではということでダンボール ゴジラ コスプレ衣装を製作しました。 ☟まずは動画をご覧ください! ダンボールのベースは去年のロボットを流用しました。リサイクルで環境にも優しいです...
