
3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
本記事にはアフィリエイト広告が含まれます。
目次
はじめに
SHISEIGYO-3 DC は小型ドローンに使用されるコアレスモータを採用した 1辺82mmの小型3軸姿勢制御モジュールです。コントローラとしてIMU内蔵のATOMS3を使用し点倒立を実現します。
SHISEIGYO-3 DC
coming soon… pic.twitter.com/DoIUnrOsoB— HomeMadeGarbage (@H0meMadeGarbage) October 13, 2024
本作例ではSHISEIGYO-3 DC をアクセスポイントとしてスマホ等でWiFi接続して専用ブラウザアプリで倒立パラメータの調整や回転制御も可能です。

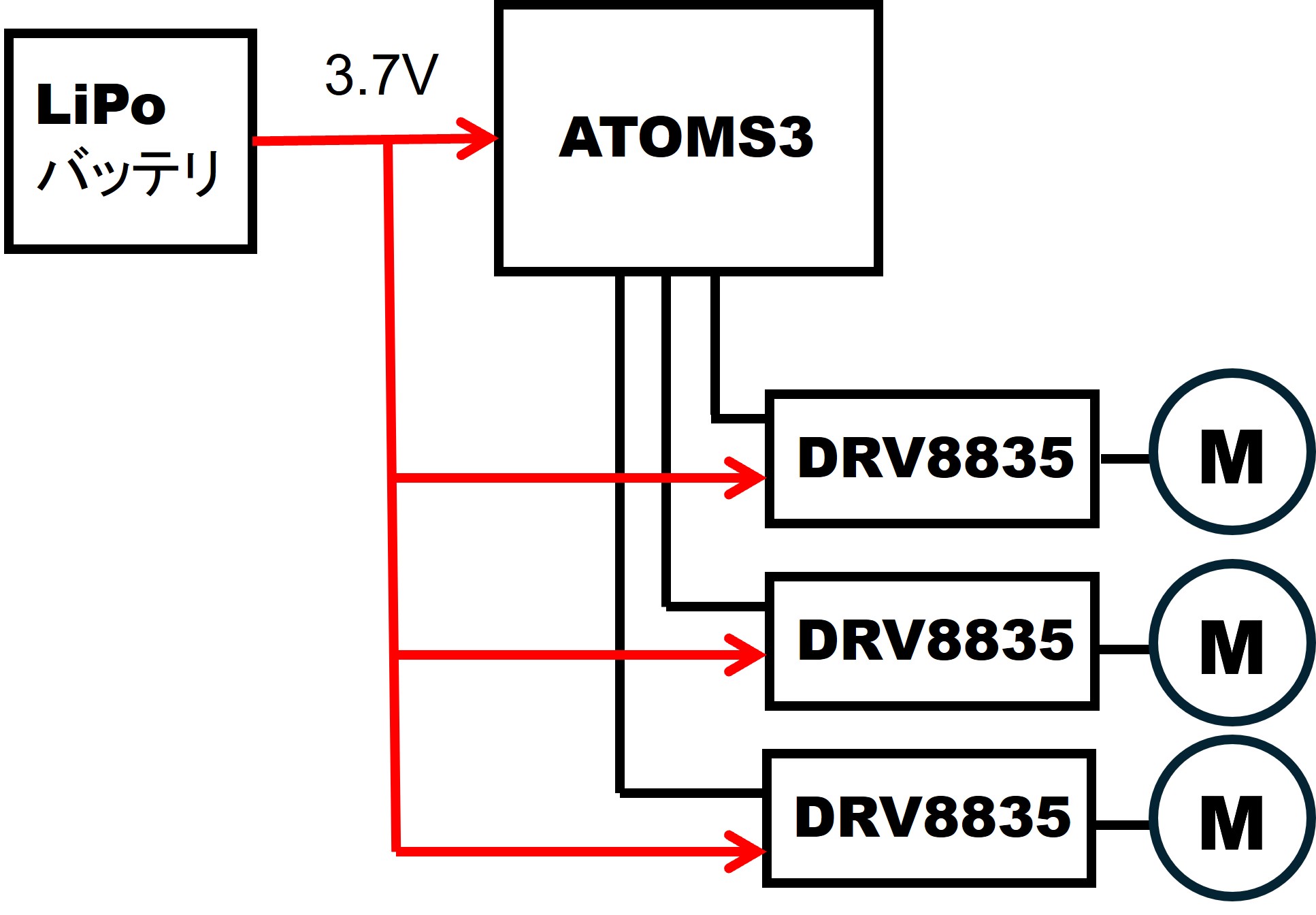
構成
マイコンにはIMU内蔵のATOMS3を使用します。
1セルのLiPoバッテリを使用してマイコンとモータに電源供給しています。
モータはモータドライバDRV8835で駆動
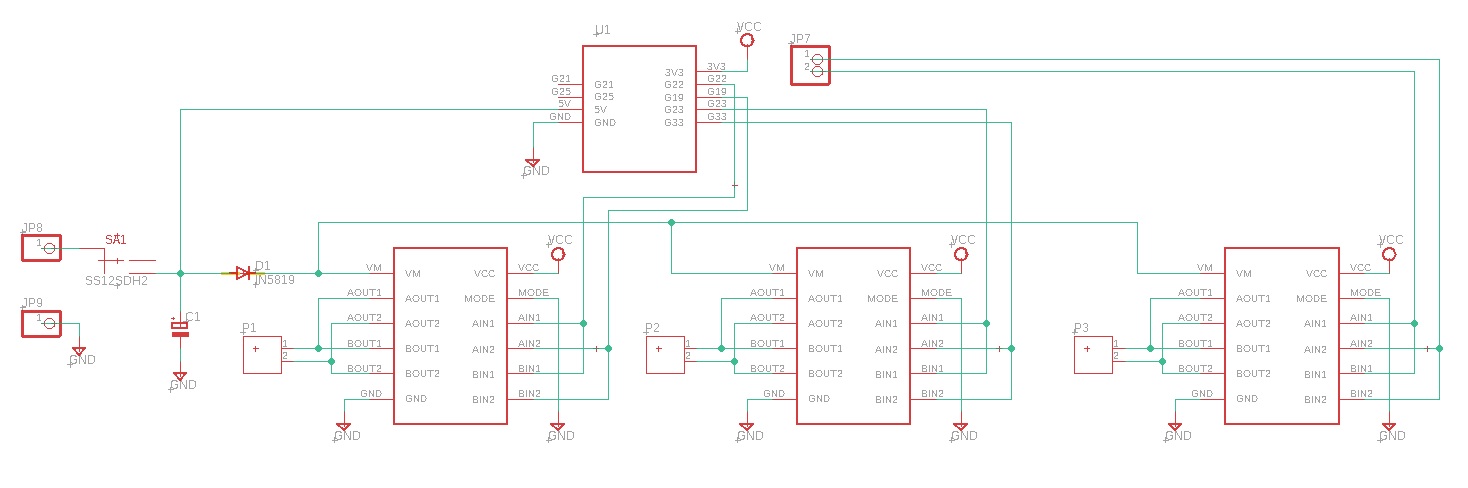
回路図
部品
ここで使用した部品は以下のとおりです。
購入先はあくまで参考です。
- ATOMS3
スイッチサイエンス:https://www.switch-science.com/products/8670
- モータドライバ DRV8835:3個
秋月電子:https://akizukidenshi.com/catalog/g/g109848/
- コアレスモータ 8520A:3個
Amazon:https://amzn.to/4fciWWs
- 1セル 3.7V LiPoバッテリ
Amazon:https://amzn.to/4t17Vi5
-
LiPoバッテリ用配線コネクタ 51006 molex オス
Amazon:https://amzn.to/3A9mHNo -
電源スイッチ SS12D00G3
Amazon:https://amzn.to/4f6AS4s - 逆起電力防止用ダイオード IN5819
Amazon:https://amzn.to/3YuP41L
- ATOMS3用ピンヘッダ (4ピン、5ピン)
スイッチサイエンス:https://www.switch-science.com/catalog/92/ - ATOMS3用4ピンコネクタケーブル
マルツ:https://www.marutsu.co.jp/pc/i/829426/
- モータ用 PHコネクタ:3セット
秋月電子;
https://akizukidenshi.com/catalog/g/g112802/
https://akizukidenshi.com/catalog/g/g112795/
https://akizukidenshi.com/catalog/g/g112809/
使用したネジは以下のとおりです。
- M2×6mmネジ:1本 (ATOMと基板固定用)
- M3×6mmネジ:4本 (基板固定用)
- M3×5mmネジとナット:24セット (フライホイール重り用)
- M2×5mmネジ:6本 (フライホイールシャフト固定用)
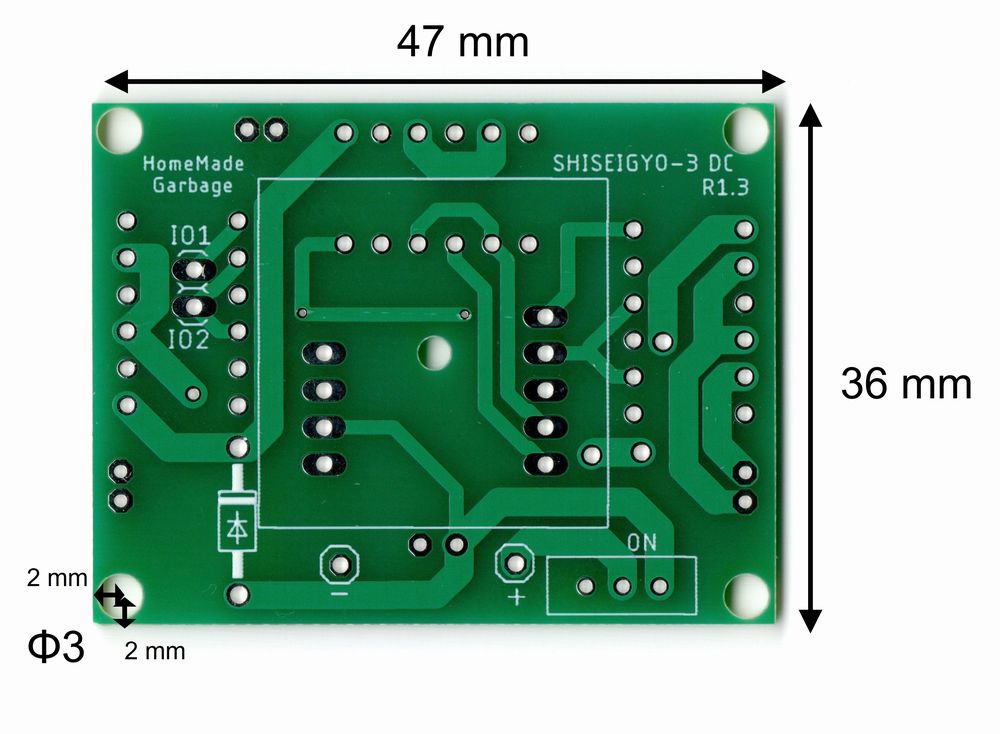
専用基板
以下で専用基板を販売しております。
もちろんユニバーサル基板などでの自作も可能です。
基板のサイズは以下のとおりで、筐体3Dモデルもこの基板サイズを元に製作しています。
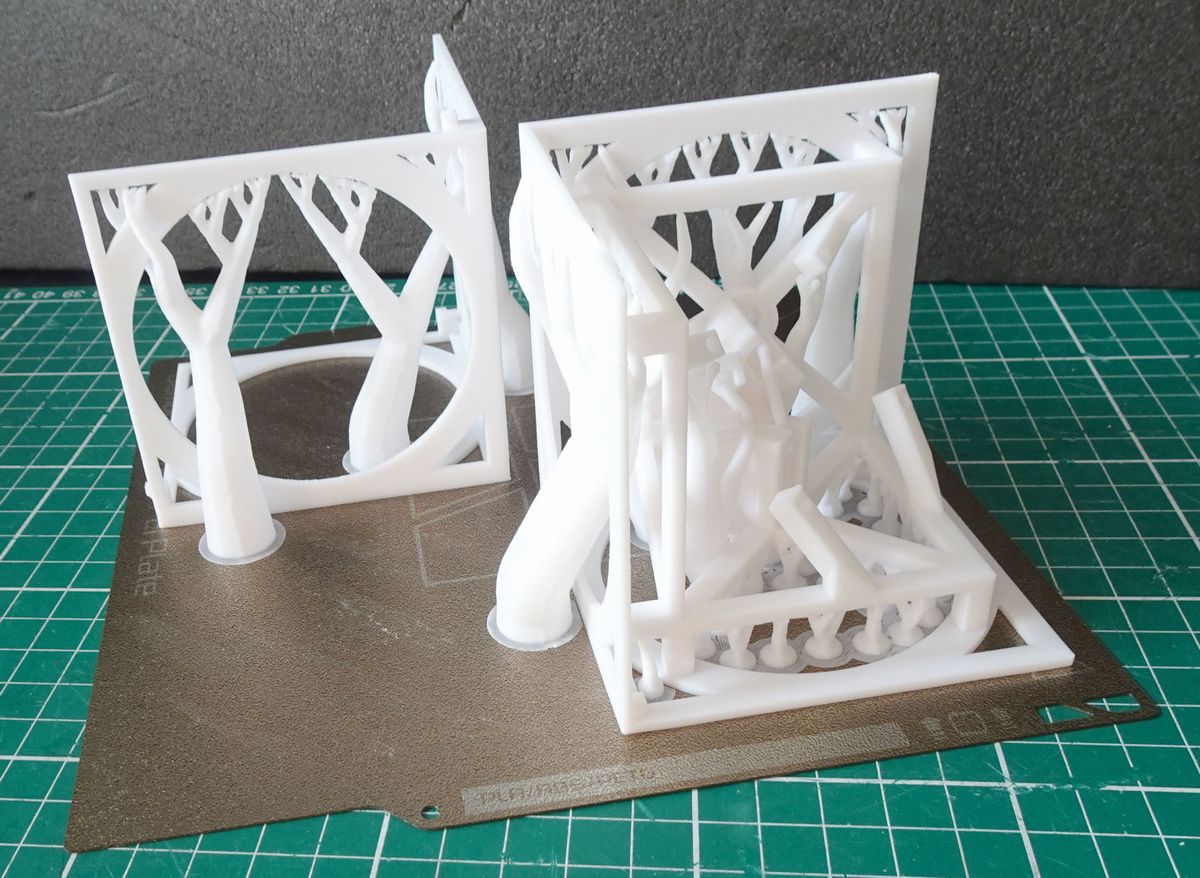
3Dモデル
3Dモデルは以下よりダウンロードできます。zipファイルがダウンロードされます。
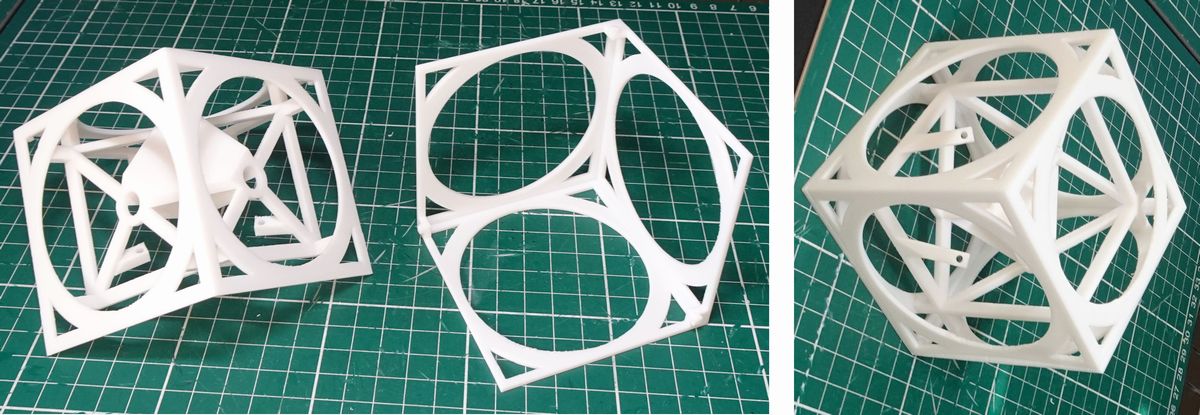
筐体モデルデータ

ここではPLAフィラメントで出力しました。強度が求められるwheel.stlは充填密度100%で印刷し、残りのモデルは25%としました。
筐体は2パーツ構成とシンプルにしました。
ネジを使用しないスナップフィットです。
ケースをスナップフィット pic.twitter.com/cjpYw9MANd
— HomeMadeGarbage (@H0meMadeGarbage) August 19, 2024
筐体組み立てキット
3Dプリント品も販売しております。
よろしければご検討ください。
製作
SHISEIGYO-3 DC を組み立てます。ここでは専用基板を使用した製法を記載します。
コントローラ作製
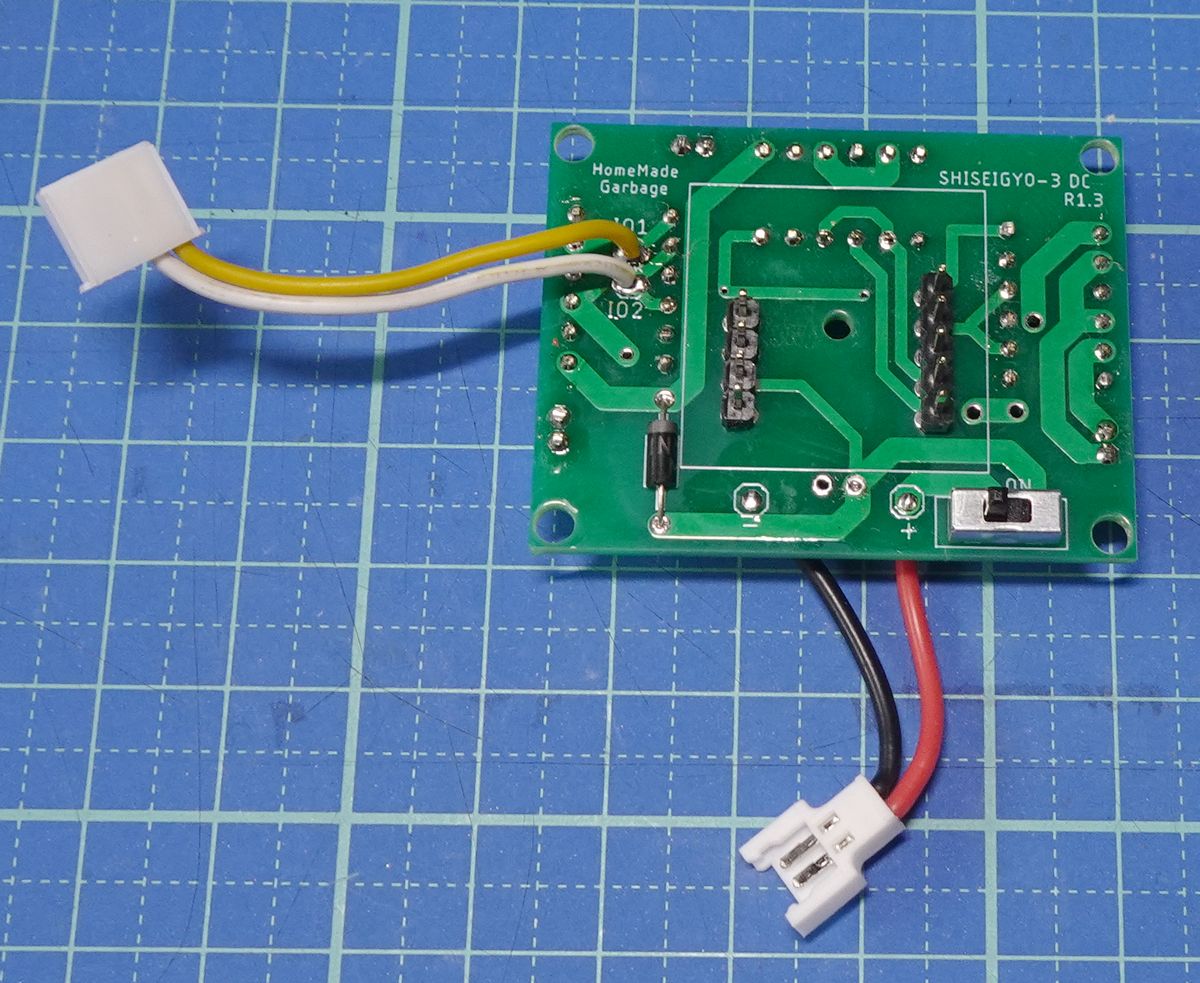
専用基板オモテ面に逆起電力防止用ダイオードと電源スイッチ、ATOMS3用ピンヘッダ、ATOMS3用4ピンコネクタケーブルをはんだ付けします。
4ピンコネクタケーブルはATOMS3のIO1とIO2への配線のために使用します。
残りの電源・GND配線は使用しません。
基板表記のIO1とIO2がATOMS3のGPIOに対応するように配線してください。
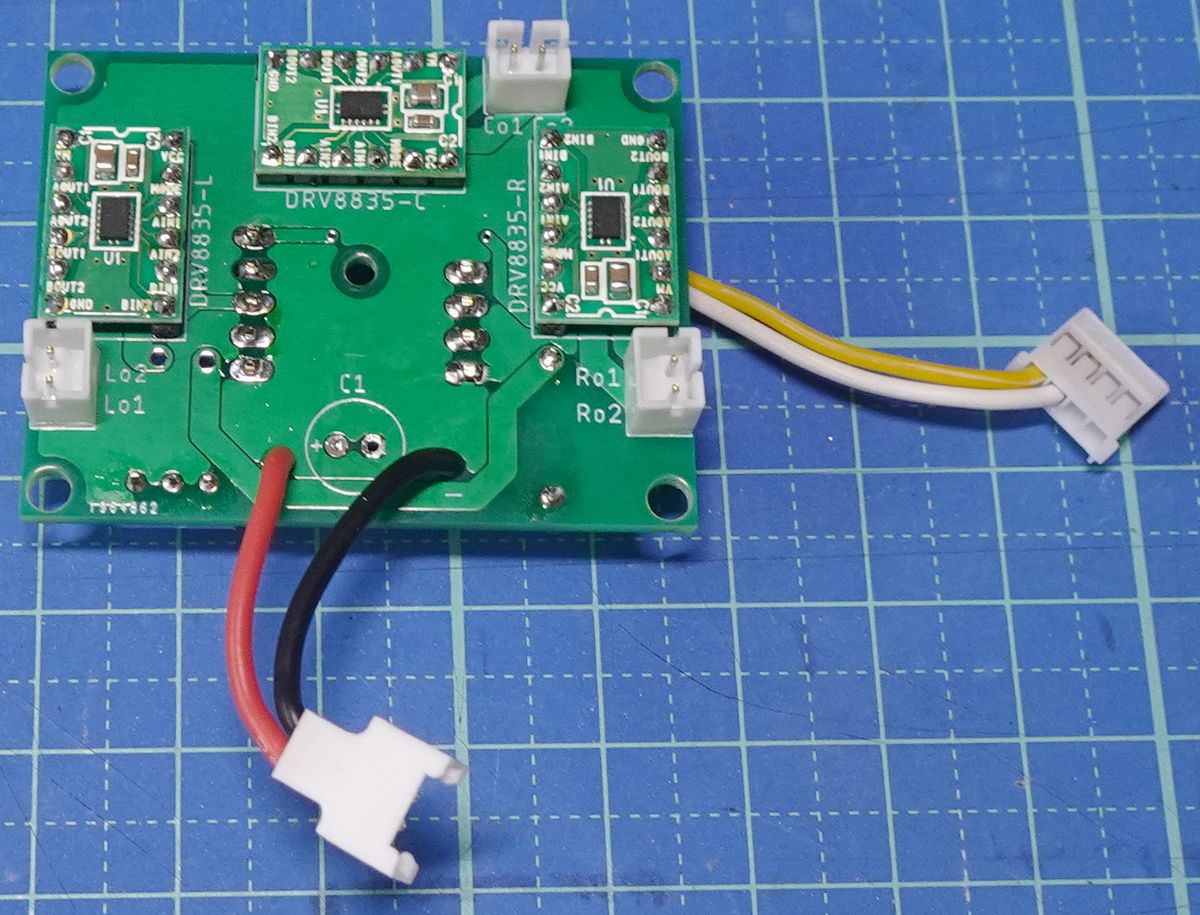
専用基板ウラ面にモータドライバDRV8835、LiPoバッテリ用配線コネクタ、モータ接続用コネクタをはんだ付けします。
DRV8835は付属のピンヘッダを介して実装します。ICの向きは基板表記に従ってください。
モータ接続用コネクタを使用せずにモータ配線を直接はんだ接続しても問題ありません。
基板にATOMS3をスペーサ (spacer.stl) を挟んでM2×6mmで固定します。

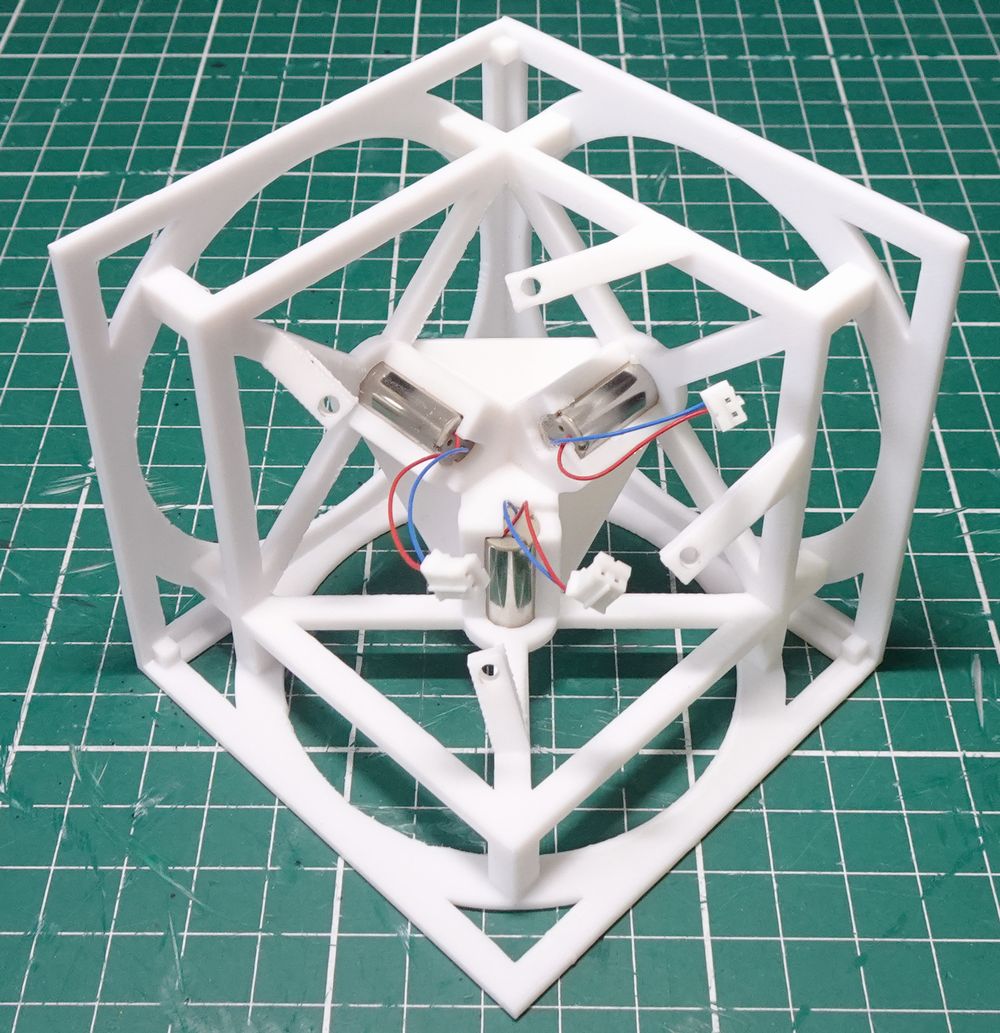
モータ実装
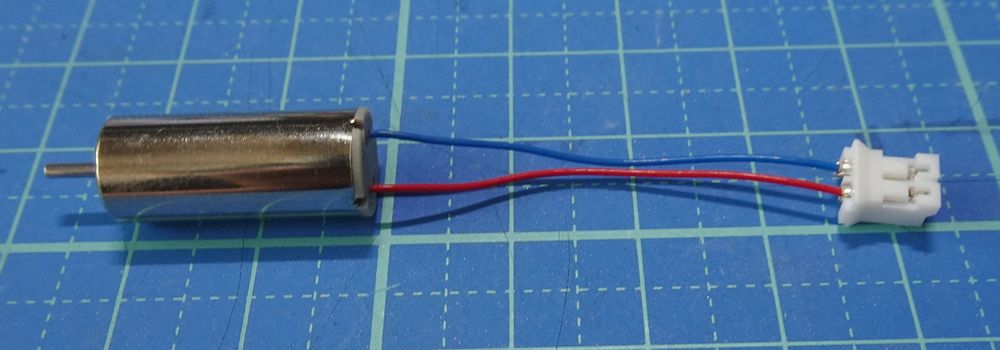
モータに接続用の2ピンPHコネクタを接続します。
配線が赤青モータの場合は 赤:1pin/青2pin、配線が黒白の場合は 黒:1pin/白2pinとします。
物によっては配線方向が異なる場合がありますので、後述するモータ回転方向確認プログラミングでご確認ください。
以下でコネクタ配線し動作確認済みのモータ3個セットの販売もしております。
モータを筐体case1.stlにはめ込みます。緩い場合は瞬間接着剤点付けなどで固定。
モータをコネクタを使用せずにはんだ付けする場合にも先にモータを筐体に固定します。
コントローラ実装
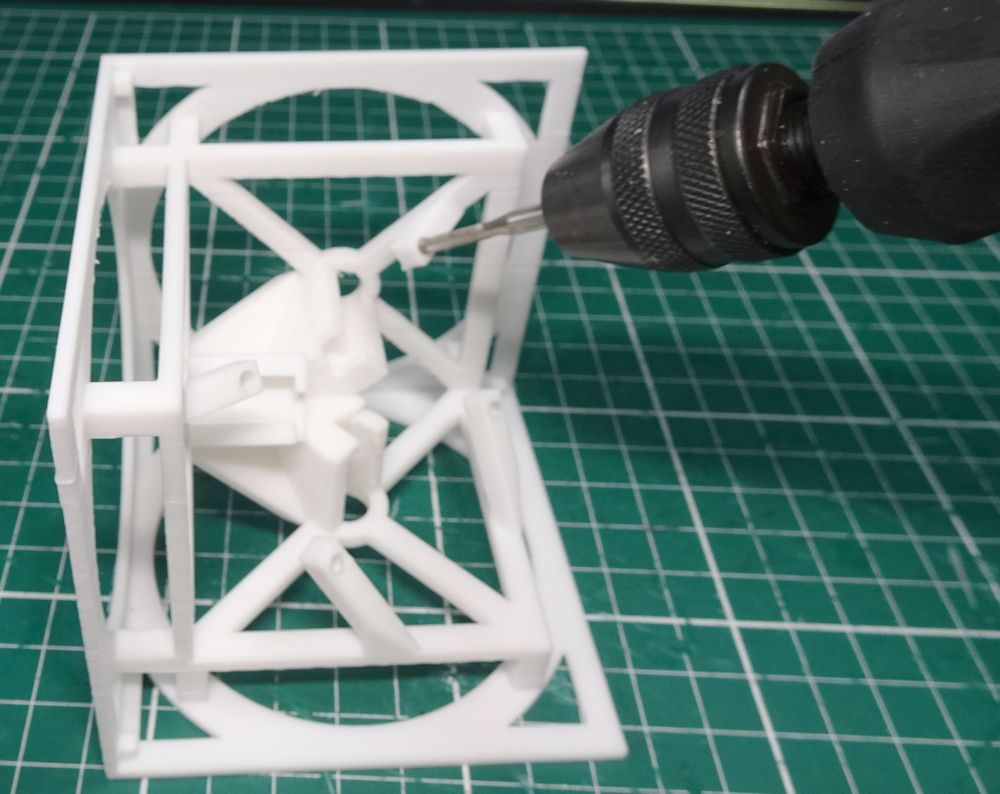
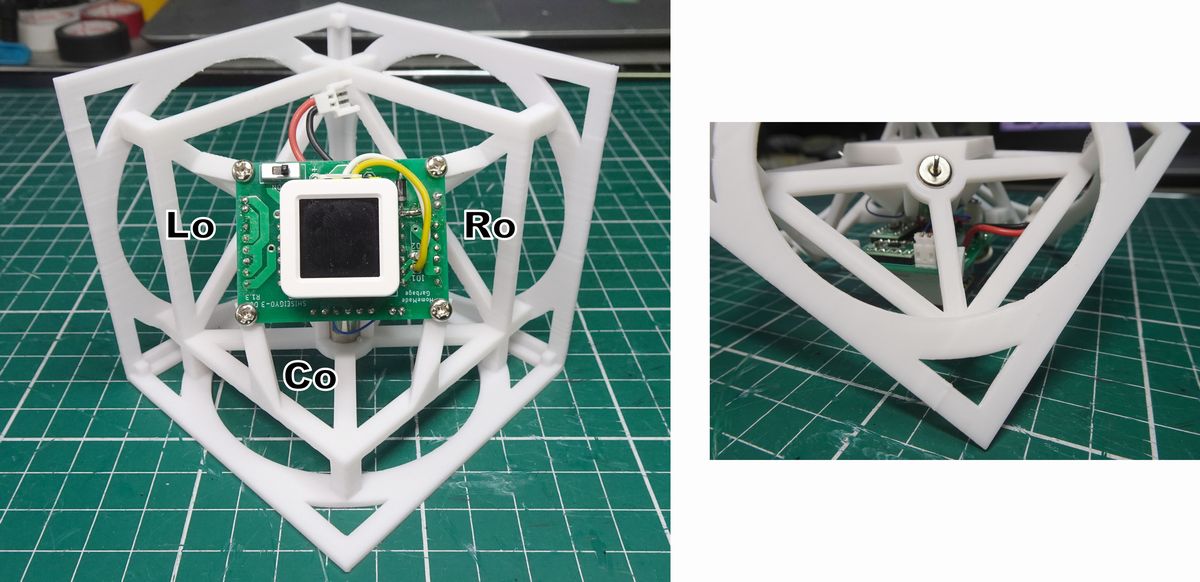
筐体case1.stlのネジ穴をM3のタップでねじ切りして、モータコネクタを接続して基板を実装します。
モータコネクタは正面をCo、左をLo、右をRoに接続します。
バッテリ、フライホイール実装
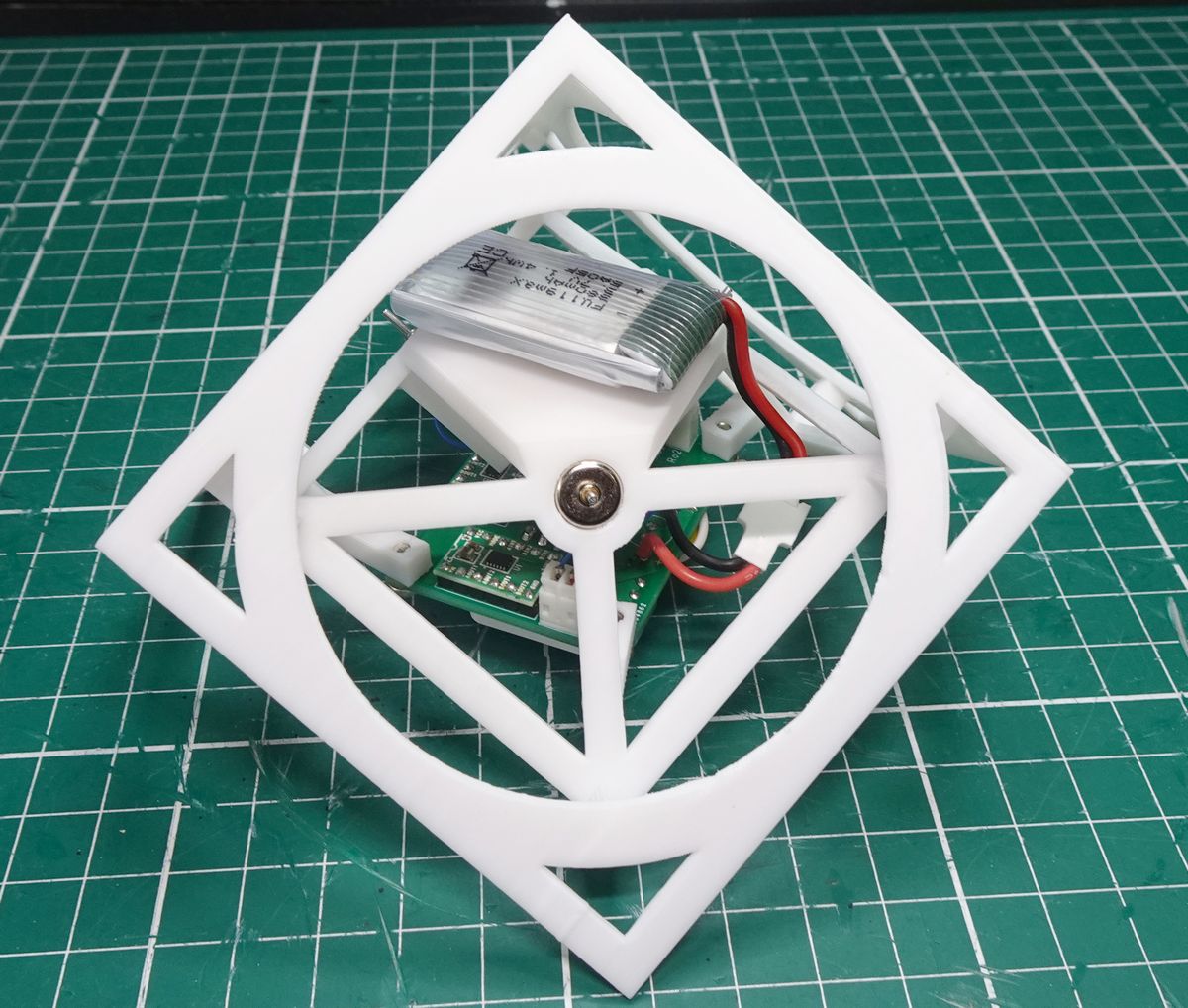
LiPoバッテリをモータ固定部の底面に両面テープで固定し基板のコネクタと接続。
ホイールフレーム (wheel.stl) のモータシャフト固定部の穴2か所をM2のタップでねじ切りしておきます。

ホイールフレームの穴に重りとして M3×5mmネジとナットを8個ずつ取り付けます。
ここではホイール1個の総重量は9gになりました。ネジ長やナットの数を変えてホイール重量を調整も可能です。

ホイールをモータシャフトにはめて軸のネジ穴2か所をM2×5mmネジで固定します。
モータシャフトに入らない場合はホイールの穴を1.2㎜ピンバイスで拡張してください。
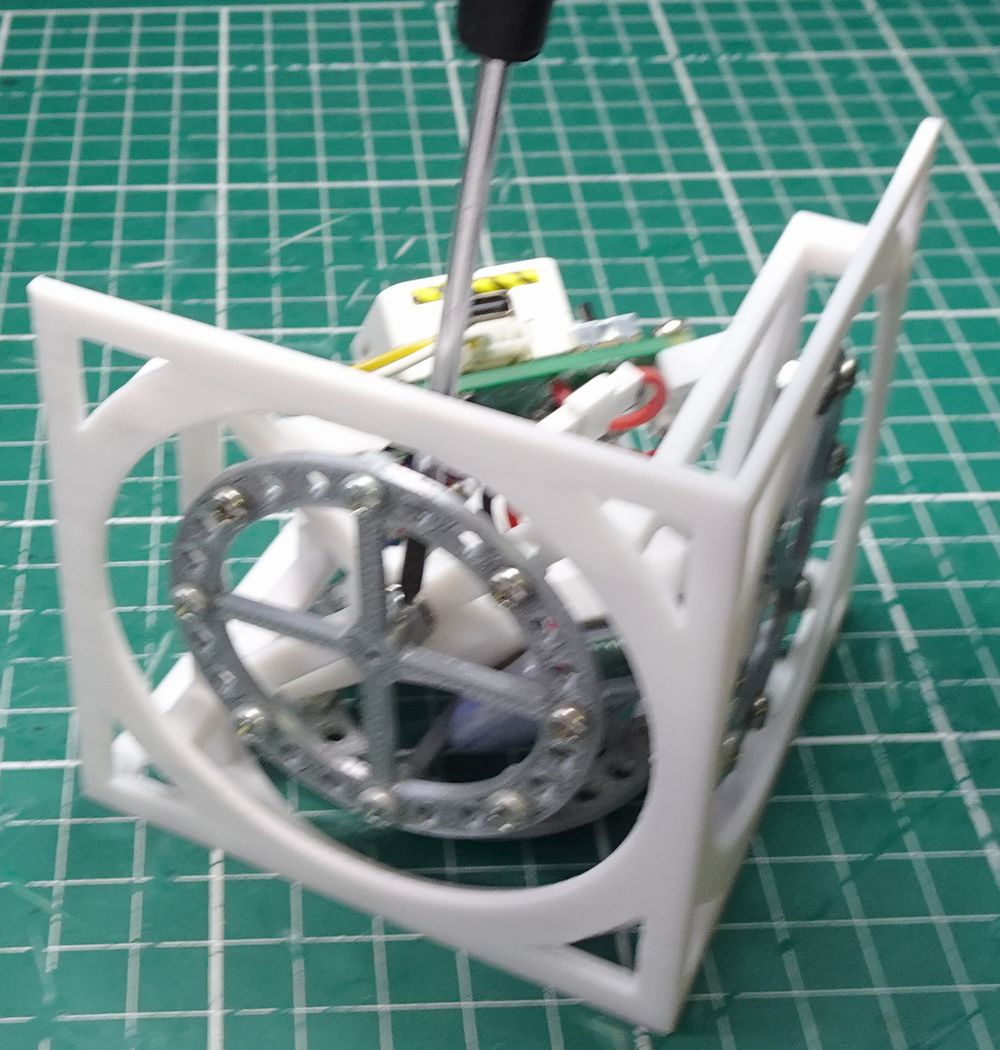
バッテリなどに干渉しないか各ホイールのまわり具合をよく確認してください。
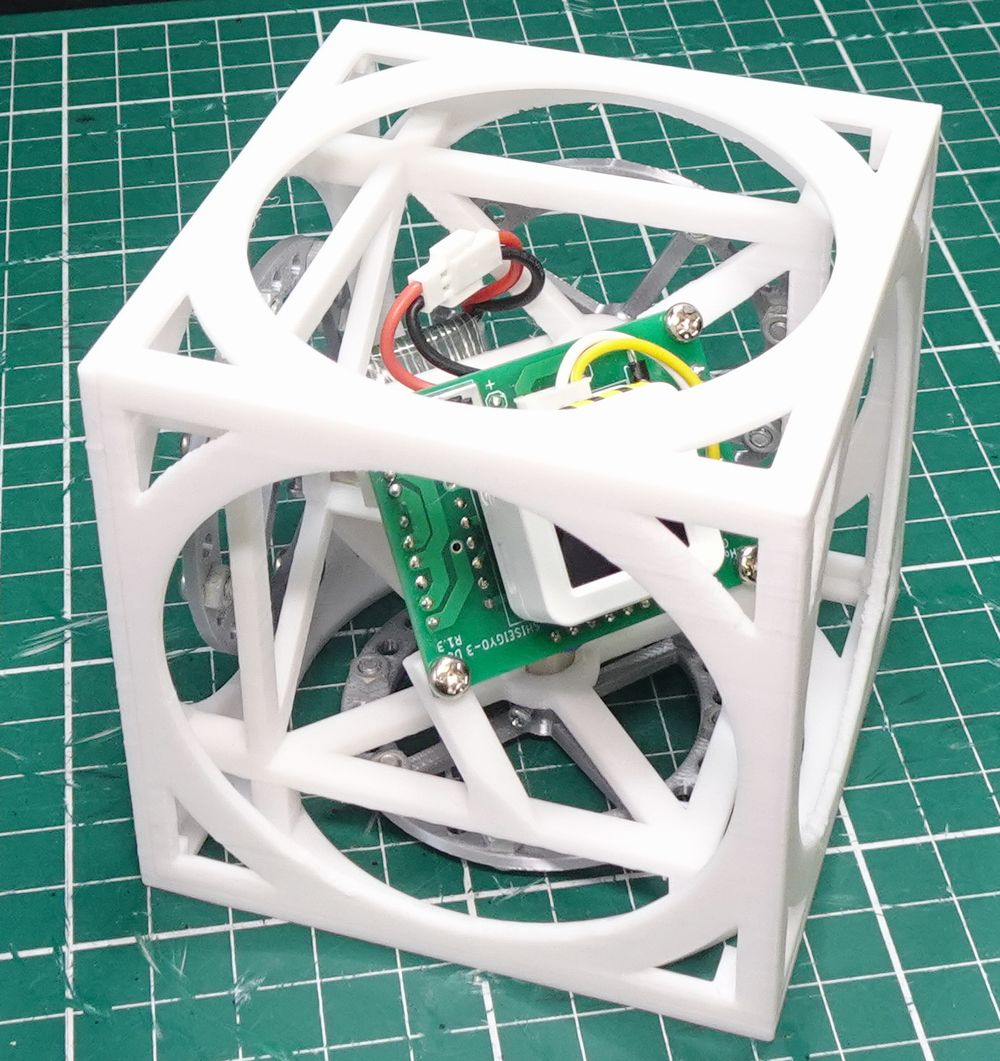
完成
筐体case2.stlをかぶせて組み立て完了です。
モータ回転確認コード
以下のコードを書きこんでモータの回転方向の確認を実施します。
モータ接続に不安がない場合はスキップしてください。
Arduinoやライブラリのバージョンは次節を確認ください。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 |
#define Lch1 5 #define Lch2 4 #define Rch1 3 #define Rch2 2 #define Cch1 1 #define Cch2 0 #define Lin1 5 #define Lin2 6 #define Rin1 2 #define Rin2 1 #define Cin1 7 #define Cin2 8 void setup() { Serial.begin(115200); ledcSetup(Lch1, 20000, 10); ledcAttachPin(Lin1, Lch1); ledcSetup(Lch2, 20000, 10); ledcAttachPin(Lin2, Lch2); ledcSetup(Rch1, 20000, 10); ledcAttachPin(Rin1, Rch1); ledcSetup(Rch2, 20000, 10); ledcAttachPin(Rin2, Rch2); ledcSetup(Cch1, 20000, 10); ledcAttachPin(Cin1, Cch1); ledcSetup(Cch2, 20000, 10); ledcAttachPin(Cin2, Cch2); ledcWrite(Lch1, 1023); ledcWrite(Lch2, 1023); ledcWrite(Rch1, 1023); ledcWrite(Rch2, 1023); ledcWrite(Cch1, 1023); ledcWrite(Cch2, 1023); } void loop() { ledcWrite(Cch1, 1023); ledcWrite(Cch2, 1008); ledcWrite(Lch1, 1023); ledcWrite(Lch2, 1008); ledcWrite(Rch1, 1023); ledcWrite(Rch2, 1008); } |
回転確認
全てのホイールが正面から見て時計回りに回っていたら問題ありません。
回転が弱い場合は上記コードのloop内のledcWriteの設定値1008を少し小さくして(1000など)ご確認ください 。
モータ印可電圧が大きくなり回転が速くなります。
反転しているホイールがある場合は配線を逆にするか、コード(L. 8~13)の各モータドライバへの入力ピン(Lin, Rin Cin)の1と2を逆にしてください。
モーターライズ pic.twitter.com/G0pG2NwOCm
— HomeMadeGarbage (@H0meMadeGarbage) October 13, 2024
Arduinoコード
倒立動作用のコードです。以下よりダウンロードしてください。
ATOMS3のIMUライブラリの自由度が低いためM5StickのMPU6886ライブラリをATOMS3用にカスタマイズして使用しています。
使用ライブラリ
ここでは以下のバージョンを使用しています。各自の環境に合わせて適宜カスタマイズください。
・Arduino IDEバージョン:1.8.19
・ESP32ボードマネージャ:2.0.17
・M5GFXライブラリ:0.1.17
・Kalman Filter Library:1.0.2
書き込みの設定は以下の通りです。
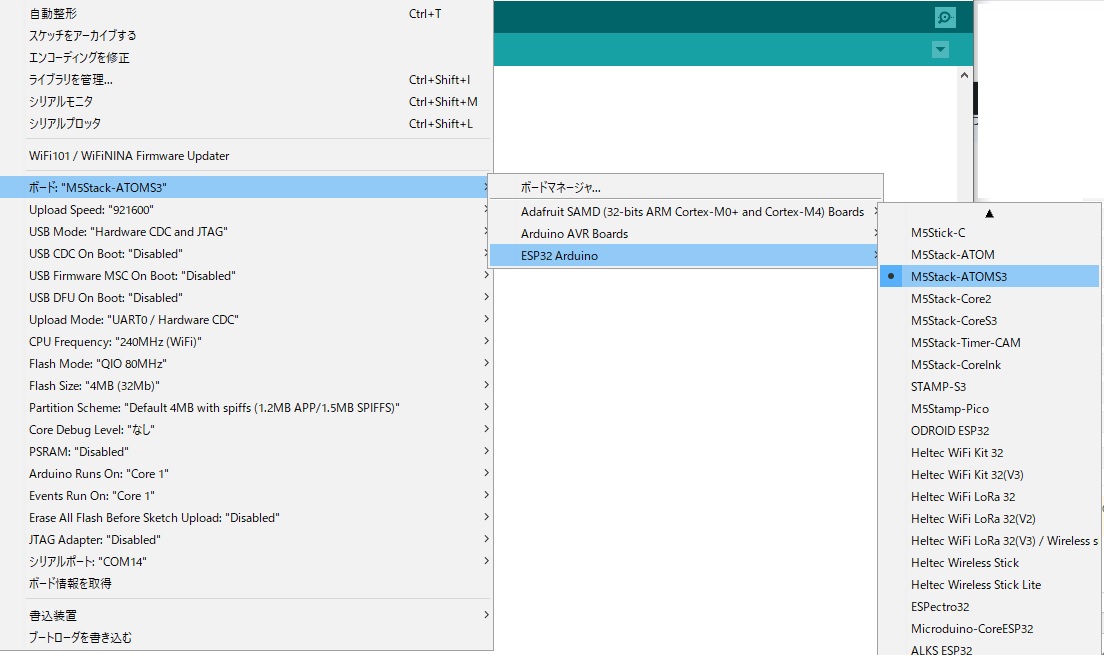
コード
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 |
#include "MPU6886.h" #include <Kalman.h> #include <WiFi.h> #include <WebServer.h> #include <Preferences.h> #include <M5GFX.h> M5GFX lcd; WebServer server(80); const char ssid[] = "S-3 DC"; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 22, 33); // IPアドレス const IPAddress subnet(255, 255, 255, 0); // サブネットマスク #define Lch1 5 #define Lch2 4 #define Rch1 3 #define Rch2 2 #define Cch1 1 #define Cch2 0 #define Lin1 5 #define Lin2 6 #define Rin1 2 #define Rin2 1 #define Cin1 7 #define Cin2 8 MPU6886 IMU; unsigned long oldTime = 0, loopTime, nowTime; float dt; float omegaZ = 0.0, varW = 0.0; int omZon = 0; float Prot = 0.1; float Kp = 50; float Kd = 70; float Kw = 2.0; float IDRS = 2.5; int delayTime = 0; int pwmDutyC, pwmDutyL, pwmDutyR; int GetUP = 0; int GetUpCnt = 0; float MtC, MtL, MtR, MtX, MtY, MpreX = 0.0, MpreY = 0.0; float AjX = 0.0, AjY = 0.0; float accX = 0, accY = 0, accZ = 0; float gyroX = 0, gyroY = 0, gyroZ = 0; float theta_X = 0.0, theta_Y = 0.0; float theta_Xdot = 0.0, theta_Ydot = 0.0; Kalman kalmanX, kalmanY; float kalAngleX, kalAngleDotX, kalAngleY, kalAngleDotY; float offsetX = 0.0, offsetY = 0.0; Preferences preferences; //加速度センサから傾きデータ取得 [deg] void get_theta_acc() { IMU.getAccelData(&accX, &accY, &accZ); //傾斜角導出 単位はdeg theta_X = atan2(accY, accZ) * 57.29578f + offsetX; theta_Y = atan2(-accX, accZ) * 57.29578f + offsetY; } //Y軸 角速度取得 void get_gyro_data() { IMU.getGyroData(&gyroX, &gyroY, &gyroZ); theta_Xdot = gyroX; theta_Ydot = gyroY; } //ブラウザ表示 void handleRoot() { String temp = "<!DOCTYPE html> \n<html lang=\"ja\">"; temp += "<head>"; temp += "<meta charset=\"utf-8\">"; temp += "<title>SHISEIGYO-3 DC</title>"; temp += "<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp += "<style>"; temp += ".container{"; temp += " max-width: 500px;"; temp += " margin: auto;"; temp += " text-align: center;"; temp += " font-size: 1.2rem;"; temp += "}"; temp += "span,.pm{"; temp += " display: inline-block;"; temp += " border: 1px solid #ccc;"; temp += " width: 50px;"; temp += " height: 30px;"; temp += " vertical-align: middle;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "span{"; temp += " width: 120px;"; temp += "}"; temp += "button{"; temp += " width: 100px;"; temp += " height: 40px;"; temp += " font-weight: bold;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "</style>"; temp += "</head>"; temp += "<body>"; temp += "<div class=\"container\">"; temp += "<h3>SHISEIGYO-3 DC</h3>"; //omegaZ temp += "回転<br>"; temp += "<a class=\"pm\" href=\"/omegaZm\">-</a>"; temp += "<span>" + String(omegaZ) + "</span>"; temp += "<a class=\"pm\" href=\"/omegaZp\">+</a><br>"; //Prot temp += "回転パラメータ<br>"; temp += "<a class=\"pm\" href=\"/ProtM\">-</a>"; temp += "<span>" + String(Prot) + "</span>"; temp += "<a class=\"pm\" href=\"/ProtP\">+</a><br>"; //offsetX temp += "offsetX<br>"; temp += "<a class=\"pm\" href=\"/offsetXm\">-</a>"; temp += "<span>" + String(offsetX) + "</span>"; temp += "<a class=\"pm\" href=\"/offsetXp\">+</a><br>"; //offsetY temp += "offsetY<br>"; temp += "<a class=\"pm\" href=\"/offsetYm\">-</a>"; temp += "<span>" + String(offsetY) + "</span>"; temp += "<a class=\"pm\" href=\"/offsetYp\">+</a><br>"; //Kp temp += "Kp<br>"; temp += "<a class=\"pm\" href=\"/KpM\">-</a>"; temp += "<span>" + String(Kp) + "</span>"; temp += "<a class=\"pm\" href=\"/KpP\">+</a><br>"; //Kd temp += "Kd<br>"; temp += "<a class=\"pm\" href=\"/KdM\">-</a>"; temp += "<span>" + String(Kd) + "</span>"; temp += "<a class=\"pm\" href=\"/KdP\">+</a><br>"; //Kw temp += "Kw<br>"; temp += "<a class=\"pm\" href=\"/KwM\">-</a>"; temp += "<span>" + String(Kw) + "</span>"; temp += "<a class=\"pm\" href=\"/KwP\">+</a><br>"; //IDRS temp += "IDRS<br>"; temp += "<a class=\"pm\" href=\"/IDRSm\">-</a>"; temp += "<span>" + String(IDRS) + "</span>"; temp += "<a class=\"pm\" href=\"/IDRSp\">+</a><br>"; //delayTime temp += "delayTime<br>"; temp += "<a class=\"pm\" href=\"/delayTimeM\">-</a>"; temp += "<span>" + String(delayTime) + "</span>"; temp += "<a class=\"pm\" href=\"/delayTimeP\">+</a><br>"; temp += "</div>"; temp += "</body>"; server.send(200, "text/HTML", temp); } void omegaZm() { if (omegaZ >= -50) { omegaZ -= 5; } handleRoot(); } void omegaZp() { if (omegaZ <= 50) { omegaZ += 5; } handleRoot(); } void ProtM() { if (Prot >= 0) { Prot -= 0.1; preferences.putFloat("Prot", Prot); } handleRoot(); } void ProtP() { if (Prot <= 100) { Prot += 0.1; preferences.putFloat("Prot", Prot); } handleRoot(); } void offsetXm() { if (offsetX >= -10) { offsetX -= 0.1; preferences.putFloat("offsetX", offsetX); } handleRoot(); } void offsetXp() { if (offsetX <= 10) { offsetX += 0.1; preferences.putFloat("offsetX", offsetX); } handleRoot(); } void offsetYm() { if (offsetY >= -10) { offsetY -= 0.1; preferences.putFloat("offsetY", offsetY); } handleRoot(); } void offsetYp() { if (offsetY <= 10) { offsetY += 0.1; preferences.putFloat("offsetY", offsetY); } handleRoot(); } void KpM() { if (Kp >= 0.1) { Kp -= 1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KpP() { if (Kp <= 300) { Kp += 1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KdM() { if (Kd >= 0.1) { Kd -= 1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KdP() { if (Kd <= 300) { Kd += 1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KwM() { if (Kw >= 0) { Kw -= 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void KwP() { if (Kw <= 300) { Kw += 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void IDRSm() { if (IDRS >= 0.1) { IDRS -= 0.1; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void IDRSp() { if (IDRS <= 10) { IDRS += 0.1; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void delayTimeM() { if (delayTime >= 0) { delayTime -= 1; preferences.putInt("delayTime", delayTime); } handleRoot(); } void delayTimeP() { if (delayTime <= 30) { delayTime += 1; preferences.putInt("delayTime", delayTime); } handleRoot(); } //Core0 void display(void *pvParameters) { lcd.begin(); lcd.setRotation(2); lcd.setTextColor(0xFFFFFFU, 0x000000U); //1つ目の引数が文字色、2つ目の引数が背景色 WiFi.softAP(ssid, pass); // SSIDとパスの設定 delay(100); // 追記:このdelayを入れないと失敗する場合がある WiFi.softAPConfig(ip, ip, subnet); // IPアドレス、ゲートウェイ、サブネットマスクの設定 IPAddress myIP = WiFi.softAPIP(); // WiFi.softAPIP()でWiFi起動 server.on("/", handleRoot); server.on("/omegaZm", omegaZm); server.on("/omegaZp", omegaZp); server.on("/ProtM", ProtM); server.on("/ProtP", ProtP); server.on("/offsetXm", offsetXm); server.on("/offsetXp", offsetXp); server.on("/offsetYm", offsetYm); server.on("/offsetYp", offsetYp); server.on("/KpP", KpP); server.on("/KpM", KpM); server.on("/KdP", KdP); server.on("/KdM", KdM); server.on("/KwP", KwP); server.on("/KwM", KwM); server.on("/IDRSp", IDRSp); server.on("/IDRSm", IDRSm); server.on("/delayTimeP", delayTimeP); server.on("/delayTimeM", delayTimeM); server.begin(); for (;;) { server.handleClient(); lcd.setTextFont(4); lcd.setCursor(0, 1); lcd.printf("%+05.1f", kalAngleX); //lcd.printf("%+07.5f", varW); lcd.setCursor(64, 1); lcd.printf("%+05.1f", kalAngleY); int xx = map(-kalAngleX, 20, -20, 25, 127); xx = constrain(xx, 25, 127); uint32_t colorX; if (fabs(kalAngleX) <= 1.0) { colorX = 0x00FF00U; } else if (fabs(kalAngleX) <= 15) { colorX = 0x0000FFU; } else { colorX = 0xFF0000U; } lcd.fillRect(0, xx - 2, 128, 5, colorX); int yy = map(-kalAngleY, 20, -20, 0, 127); yy = constrain(yy, 0, 127); uint32_t colorY; if (fabs(kalAngleY) <= 1.0) { colorY = 0x00FF00U; } else if (fabs(kalAngleY) <= 15) { colorY = 0x0000FFU; } else { colorY = 0xFF0000U; } lcd.fillRect(yy - 2, 25, 5, 128, colorY); delay(33); lcd.clear(); /* USBSerial.print(rotEst); USBSerial.print(", "); USBSerial.println(rotSpeed); */ disableCore0WDT(); } } void setup() { Serial.begin(115200); IMU.Init(); //フルスケールレンジ IMU.SetAccelFsr(IMU.AFS_2G); IMU.SetGyroFsr(IMU.GFS_250DPS); get_theta_acc(); kalmanX.setAngle(theta_X); kalmanY.setAngle(theta_Y); ledcSetup(Lch1, 20000, 10); ledcAttachPin(Lin1, Lch1); ledcSetup(Lch2, 20000, 10); ledcAttachPin(Lin2, Lch2); ledcSetup(Rch1, 20000, 10); ledcAttachPin(Rin1, Rch1); ledcSetup(Rch2, 20000, 10); ledcAttachPin(Rin2, Rch2); ledcSetup(Cch1, 20000, 10); ledcAttachPin(Cin1, Cch1); ledcSetup(Cch2, 20000, 10); ledcAttachPin(Cin2, Cch2); ledcWrite(Lch1, 1023); ledcWrite(Lch2, 1023); ledcWrite(Rch1, 1023); ledcWrite(Rch2, 1023); ledcWrite(Cch1, 1023); ledcWrite(Cch2, 1023); //パラメータ初期値取得 preferences.begin("parameter", false); Prot = preferences.getFloat("Prot", Prot); offsetX = preferences.getFloat("offsetX", offsetX); offsetY = preferences.getFloat("offsetY", offsetY); Kp = preferences.getFloat("Kp", Kp); Kd = preferences.getFloat("Kd", Kd); Kw = preferences.getFloat("Kw", Kw); IDRS = preferences.getFloat("IDRS", IDRS); delayTime = preferences.getInt("delayTime", delayTime); //回転位置検出 タスク xTaskCreatePinnedToCore( display , "display" // A name just for humans , 4096 // This stack size can be checked & adjusted by reading the Stack Highwater , NULL , 1 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest. , NULL , 0); } void loop() { nowTime = micros(); loopTime = nowTime - oldTime; oldTime = nowTime; dt = (float)loopTime / 1000000.0; //sec get_theta_acc(); get_gyro_data(); //カルマンフィルタ 姿勢 傾き kalAngleX = kalmanX.getAngle(theta_X, theta_Xdot, dt); kalAngleY = kalmanY.getAngle(theta_Y, theta_Ydot, dt); //カルマンフィルタ 姿勢 角速度 kalAngleDotX = kalmanX.getRate(); kalAngleDotY = kalmanY.getRate(); if (fabs(kalAngleX) < 1 && fabs(kalAngleY) < 1 && GetUP == 0) { GetUP = 80; } if (GetUP == 80) { //ブレーキ if (fabs(kalAngleX) > 15.0 || fabs(kalAngleY) > 15.0) { ledcWrite(Lch1, 1023); ledcWrite(Lch2, 1023); ledcWrite(Rch1, 1023); ledcWrite(Rch2, 1023); ledcWrite(Cch1, 1023); ledcWrite(Cch2, 1023); AjX = 0.0; AjY = 0.0; varW = 0.0; GetUP = 0; } //モータ回転 if (GetUP == 80) { AjY += IDRS * MpreY / 100.0; MtY = Kp * (kalAngleY + AjY) / 90.0 + Kd * kalAngleDotY / 500.0 + Kw * MpreY / 10.0; AjX += IDRS * MpreX / 100.0; MtX = Kp * (kalAngleX + AjX) / 90.0 + Kd * kalAngleDotX / 500.0 + Kw * MpreX / 10.0; } //回転速度追従ON if(omegaZ != 0.0){ omZon = 1; varW = Prot / 100.0 * (omegaZ - gyroZ); } //回転速度追従OFF if(fabs(varW) < 0.000005 && omZon == 1 && fabs(MtR) < 0.001){ omZon = 0; varW = 0.0; } MtC = constrain(MtY + varW , -1.0, 1.0); MpreY = MtC; pwmDutyC = 1023 * (1.0 - fabs(MtC)); if (pwmDutyC < 300) pwmDutyC = 300; MtL = constrain(float(0.5 * MtY - 0.866 * MtX), -1.0, 1.0); pwmDutyL = 1023 * (1.0 - fabs(MtL)); if (pwmDutyL < 300) pwmDutyL = 300; MtR = constrain(float(0.5 * MtY + 0.866 * MtX), -1.0, 1.0); MpreX = (MtR - MtL) * 0.5; pwmDutyR = 1023 * (1.0 - fabs(MtR)); if (pwmDutyR < 300) pwmDutyR = 300; //回転方向 if (MtC > 0.0) { ledcWrite(Cch1, pwmDutyC); ledcWrite(Cch2, 1023); } else { ledcWrite(Cch1, 1023); ledcWrite(Cch2, pwmDutyC); } if (MtL < 0.0) { ledcWrite(Lch1, pwmDutyL); ledcWrite(Lch2, 1023); } else { ledcWrite(Lch1, 1023); ledcWrite(Lch2, pwmDutyL); } if (MtR < 0.0) { ledcWrite(Rch1, pwmDutyR); ledcWrite(Rch2, 1023); } else { ledcWrite(Rch1, 1023); ledcWrite(Rch2, pwmDutyR); } } else if (GetUP == 0) { ledcWrite(Lch1, 1023); ledcWrite(Lch2, 1023); ledcWrite(Rch1, 1023); ledcWrite(Rch2, 1023); ledcWrite(Cch1, 1023); ledcWrite(Cch2, 1023); } delay(delayTime); } |
コード説明
L. 10~16 WiFi設定 SSID、パスワード、IPアドレスは適宜変えてください。
L. 18~30 PWM出力Ch、GPIO指定
前節のモータ回転確認時にIOピンの反転がある際はここで実施ください。
L. 40~45 パラメータ値指定
これらを調整して点倒立動作を実現させる。
L. 67~73
加速度センサからX軸とY軸の傾斜角を算出する関数
コードやアプリで各軸のオフセット調整 (offsetX, offsetY)が可能です。
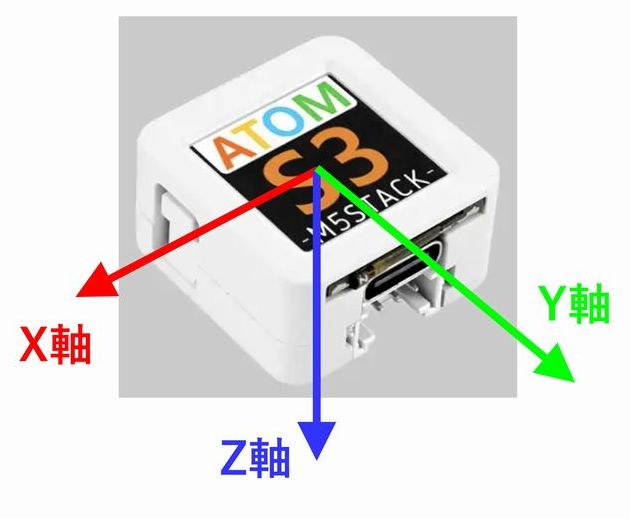
L. 75~80 角速度取得関数
X軸とY軸の角速度を検出
L. 84~330ブラウザアプリ表示設定
APモード接続時の回転や各パラメータ設定用の表示を記述しています。
L. 335~420 core0動作
ATOMS3 デュアルコアのcore0でLCDディスプレイ表示とIMUセンサの処理とブラウザ表示およびハンドラ処理を実行します。
LCDにはのX軸とY軸の角度の値と以下の通りインジケータ表示しています。
・±1°以内:緑表示
・±15°以上:赤表示
・その他:青表示
L. 424~483 setup関数
IMUセンサMPU6886のフルスケールレンジは以下で指定 (L. 430, 431)
・加速度:16bit ±2 g
・ジャイロ(角速度):16bit ±250 deg/sec
モータドライバへのPWM信号設定 (L. 437~457)
・周波数: 20kHz
・分解能: 10bit 0~1023
アプリで設定した各オフセット値はPreferences機能でフラッシュに記録します。
電源起動時にフラッシュに記録されたオフセット値を読み出します (L. 459~471)
L. 486~601 loop関数
カルマンフィルタライブラリの関数を用いてセンサの姿勢角と角速度を算出 (L. 487~503)
倒立動作 (L. 506~600)
センサのX軸、Y軸が共に角度±1°以下になるとモータを起動します (L. 506~508)。
センサの角度が±15°以上になるとモータを停止させます (L. 513~524)。
センサによるX軸とY軸の傾斜角と角速度とモータの回転速度から各軸の安定に必要なトルクを計算します (L. 527~533)。
それぞれの値にかける係数Kp (L. 41), Kd (L. 42), Kw (L.43)を調整して倒立を実現します。
パラメータが極端に大きくなったり小さくなったりしないように各パラメータ値は割って正規化しております。
またモータの回転数をセンサ角度にフィードバックして安定性の向上を図っています(L. 528, 531)
このフィードバックのかけ具合は係数IDRS (L. 44)で調整します。
これによって床が傾いてもモジュールの安定ターゲット角度が自動で調整されホイールの回転が抑制されます。
必要ない場合はIDRS = 0.0としてください。
倒立自転制御 (L. 536~546)
IMUセンサのZ軸の角速度との差でP制御してモジュールを自転させます。
パラメータ omegaZで回転速度 [deg/sec]を指定します。
P制御パラメータはProt(L. 40)で調整。
omegaZが0指定となりP制御値とモータ回転(ここでは右のモータの回転)が小さくなると自転回転動作は自動でOFFします。
先ほど算出したモジュールのX, Y軸の必要トルクに基づいてドライバに印可するPWMのデューティ値を導出して各モータを回転させます (L. 549~591)。
真ん中のモータCはY軸上に配置しているのでY軸のトルク(MtY)で回転させます。
また自転用のオフセット(varW)も加算してモジュールを倒立自転させます (L. 549)。
モータの回転速度(MpreY)はセンサがないためここで算出したデューティ値で代用しています (L. 550)。
ここではデューティ値(0~1023)が小さいほどモータ回転が速くなり300いかにならないように制限しています (L. 552)
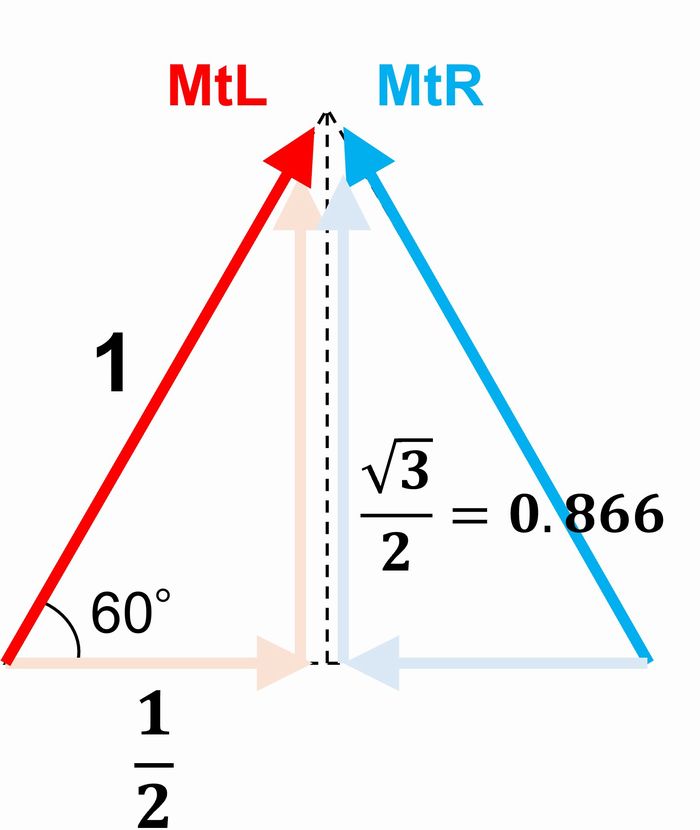
左右のモータはセンサのX軸、Y軸に対してそれぞれ斜めに配置されているので、各軸の必要トルクを振り分けて回転デューティを算出します。
左右モータの回転トルクは以下のように軸上に分解されて、Y軸の傾きによるトルクは左右で打ち消してX軸によるトルクにのみ寄与するように回転させます (L. 555, 560)。
真ん中のモータと同様に速度制限をして(L. 557, 563)、モータ速度は左右のモータの平均MpreXをフィードバックしています (L. 561)。
算出したモータのデューティで回転実行 (L. 567~590)。
ループディレイ (L. 600)
delayTime (L. 45) で制御のループ時間を調整します。
アプリ画面
-
アプリを書き込んだATOMS3を起動して、スマホもしくはPCのWiFi接続設定でSSID ”S-3 DC”に接続
パスワード:password -
ブラウザで”192.168.22.33”にアクセス
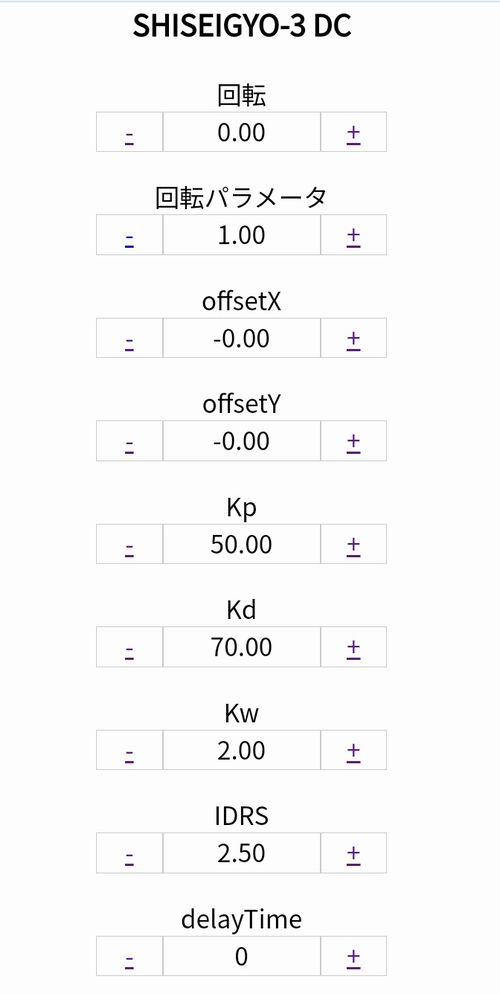
パラメータは “-“、”+”をクリックして値を増減させます。
回転以外の値は電源OFF後も保持されます。
動作
スイッチをONして機体を優しく起き上げて点倒立させます。
アプリの回転で速度[deg/sec]を指定すると自転します。
SHISEIGYO-3 DC
スイッチ追加 pic.twitter.com/ExSxTnRnQb— HomeMadeGarbage (@H0meMadeGarbage) October 20, 2024
機体のX軸とY軸の傾きが共に±1°以内になるとモータが回転し始めますので直ぐに手を放してください。
LCDのインジケータが助けになります。
起き上げ方 pic.twitter.com/SqFTZPVKZR
— HomeMadeGarbage (@H0meMadeGarbage) October 21, 2024
センサ自体のオフセットが大きい場合には倒立ができない場合があります。
ATOMS3単体を平らなところに置いて起動し、LCDディスプレイに表示される角度が0に近いかご確認ください。
大きくズレがある場合にはアプリのOffsetX、offsetYで0に近い値にしてください。
おわりに
ここではコアレスモータによる3軸姿勢制御モジュールの製法を紹介いたしました。
軽量で小型で安価な点倒立モジュールを提案できたかと思います。
是非製作してみてご感想をお聞かせください。
以下でATOMS3とLiPoバッテリ以外をまとめた準完成キットの販売もしております。ご検討ください。

関連記事
 3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
 6重倒立に向けて③ ーリアクションホイールへの道66ー
6重倒立に向けて③ ーリアクションホイールへの道66ー
 SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
 SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー