シリアルリンク 2足歩行ロボットの製作10 ー モータ変更 ー
本記事にはアフィリエイト広告が含まれます。
前回は股関節ユニットのRoll軸をYaw軸に改造して、旋回動作を楽しみました。
シリアルリンクだとヒザモータの負担が大きく。もっとトルクやスピードを大きくしたいなと常々思っておりました。

目次
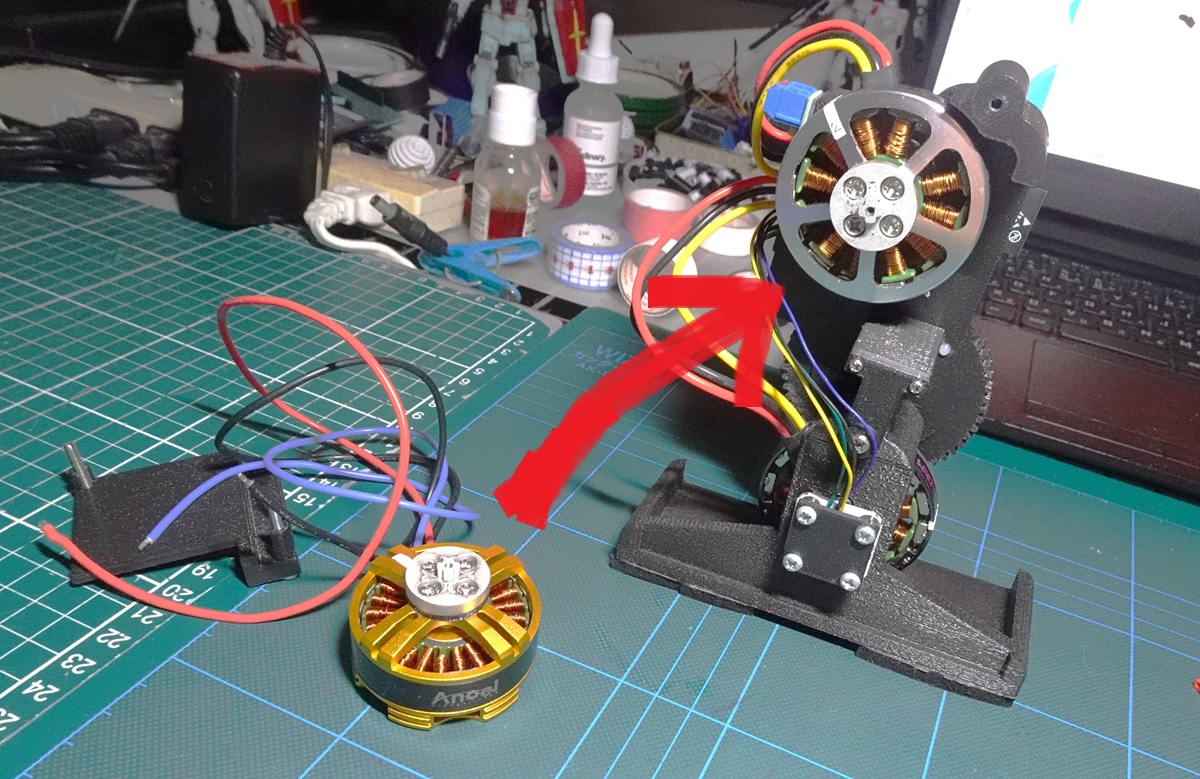
ブラシレスモータ BE4108 380KV
ずーっとヒザモータの懸念を抱え過ごしていたところ、手ごろな価格のブラシレスモータをAliExpressで発見しました。
以下のモータが2000円台で流通しだしたのです。

見た感じコイルも磁石もたくさん詰まっているようなので早速購入してみました。
到着
2025/7/30に発注し2025/8/6に着

実物を手で数えたところ
コイルの数:24
磁極数:22 (11ペア)
でした。
ぎっしり詰まっていてよい性能が期待できそうです。
ちなみに今まで愛用していたブラシレスモータ 5010 360KV は
コイルの数:12
磁極数:14 (7ペア)
です。

味見
早速モータの動作確認を実施します。
治具を組んでエンコーダと共に固定
治具をサクッと pic.twitter.com/wTGfbHqim7
— HomeMadeGarbage (@H0meMadeGarbage) August 6, 2025
ドライバと接続して高尚なる角度指定ベクトル制御で動作確認しました。
実にパワフル
HM-02のヒザに採用してテストしてみようではありませんか pic.twitter.com/6BXh7kSqDD— HomeMadeGarbage (@H0meMadeGarbage) August 6, 2025
ドライバ:MKS ESP32 FOC V2.0

なかなかに力強い動作が確認できたのでロボットのヒザに採用してみようと思いました。
ロボットのヒザに採用
BE4108 380KVをシリアルリンクロボットのヒザに採用して動作を確認してみます。
BE4108向けに足筐体を改良 (Fusion360)
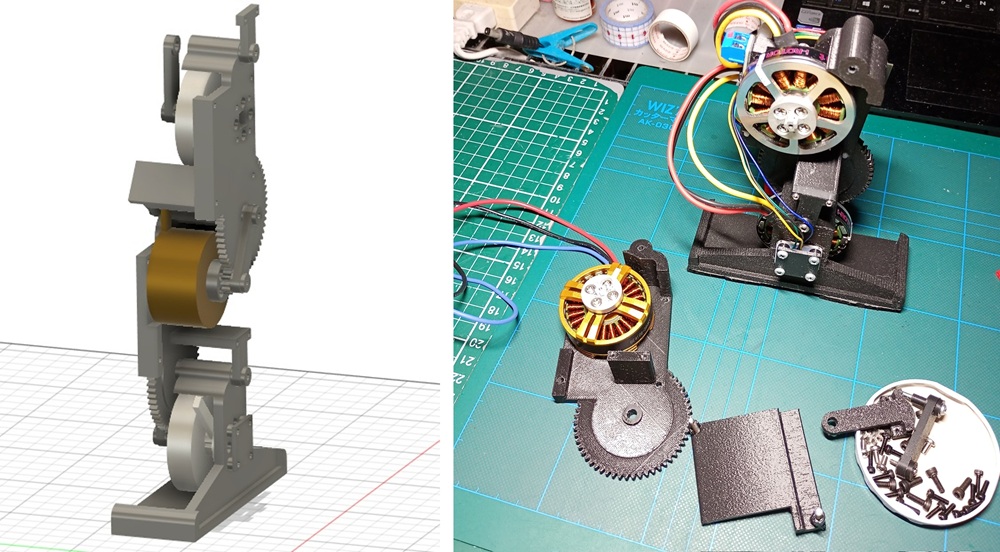
再設計した筐体を3Dプリントしてモータ実装
モータ差し替え作業中 pic.twitter.com/yeZGWr0rzQ
— HomeMadeGarbage (@H0meMadeGarbage) August 7, 2025
動作
片足のヒザをBE4108 380KVに交換しました。
左ひざモータ交換
それほど差はないなぁ pic.twitter.com/CarEcNUMFh— HomeMadeGarbage (@H0meMadeGarbage) August 7, 2025
BE4108 380KV向けに動作パラメータの調整は一切していないのですが、特に大きな問題はなく動作しました。
極端にトルクの違いもない印象でした。
トルク測定
片方のヒザのモータをBE4108 380KVに交換したところ、問題なく動作はしましたが大きな改善は感じませんでした。
そこでここでは各モータのトルクを測定して比較します。
(これ最初にやることだろ!!)
10cmのアームをモータにつけてカレントモードのベクトル制御で1A指定で回転させてスケーラーで力を測定しました。
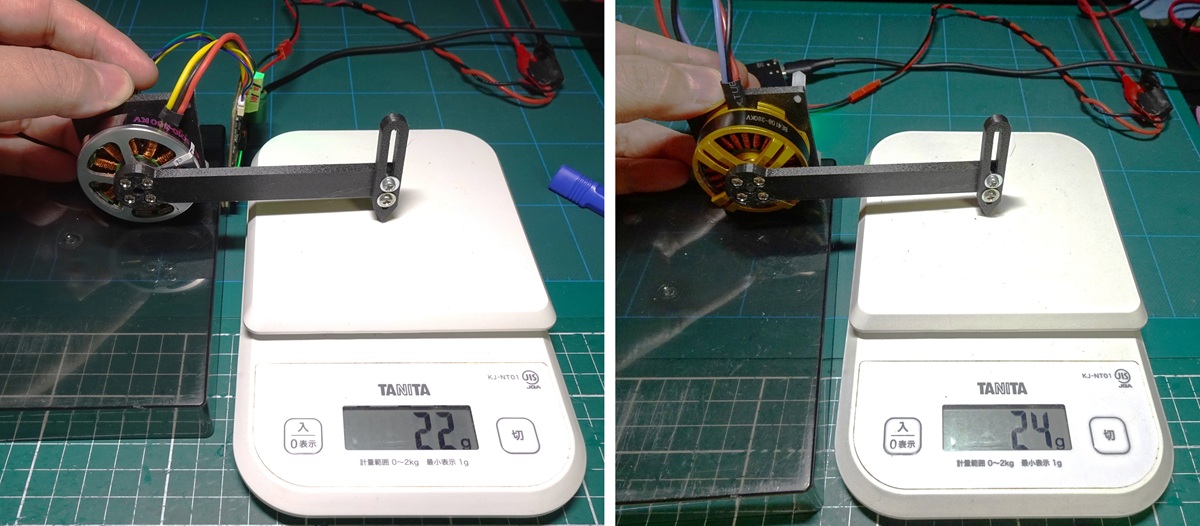
結果は以下のようになりました
5010 360KV:22g (0.22 kg・cm)
BE4108 380KV:24g (0.24 kg・cm)
トルクに大きな差はありませんでした。
片足モータ変更で動作に大きな相違がなかったことも納得です。
参考 カレントモード ベクトル制御
両ひざモータ変更
せっかくなので他方のヒザも交換してみました。

無事に交換完了
ヒザモータ交換完了
ビールを1リットルいただいてしまったので詳細確認は明日やる pic.twitter.com/jtoLCyoBW4— HomeMadeGarbage (@H0meMadeGarbage) August 8, 2025
動作味見
ヒザモータ交換
若干だけどトルクと速度上がったので動作も若干いいかんじ接地判定やら各パラメータまた一から調整必要だ pic.twitter.com/9BBUwDHWYu
— HomeMadeGarbage (@H0meMadeGarbage) August 9, 2025
無事に動作が確認できましたので、接地判定や各パラメータの調整をまた一から実施します。
動作
BE4108 380KV向けに接地判定パラメータ調整実施して動作確認
ヒザモータを360KVから380KV品に交換して、かつトルクも同等であるので動作応答が改善した気がします。
おわりに
シリアルリンク 2足歩行ロボットのヒザモータをブラシレスモータ BE4108 380KVに変更して動作を確認しました。
トルクは現行品と大きく違いはありませんでしたが、回転スピードが360KVから380KVとなったため動作応答が改善しました。
今回はヒザモータのみ交換でしたが是非すべてのモータを BE4108 380KV にして動作比較してみたいと思います。
早速AliExpressで追加購入したので到着が楽しみです。
南大阪EC小口オペレーション支店