M5ATOM
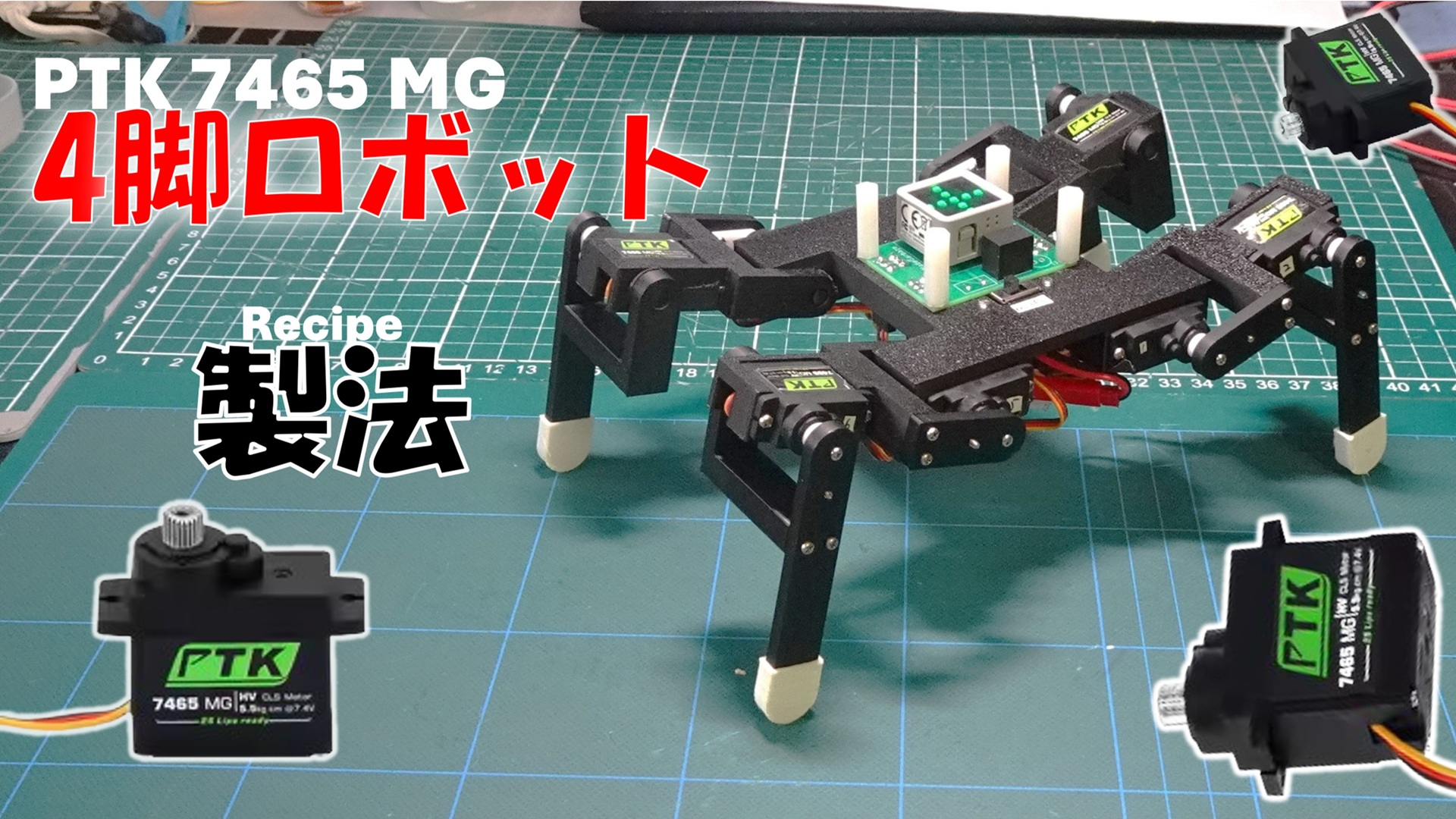
PTK 7465 MG を用いた4脚ロボットの製法
はじめに 以前、低価格なのに高トルクで高精度のPWMサーボ PTK 7465 MG を入手して大騒ぎさせていただきました。 https://homemadegarbage.com/ptk7465-01/ この時に検証で製作した4脚ロボットを作ってみたいという声をチラホラいただい...
電子工作 2025.11.14 お父ちゃん ![]()
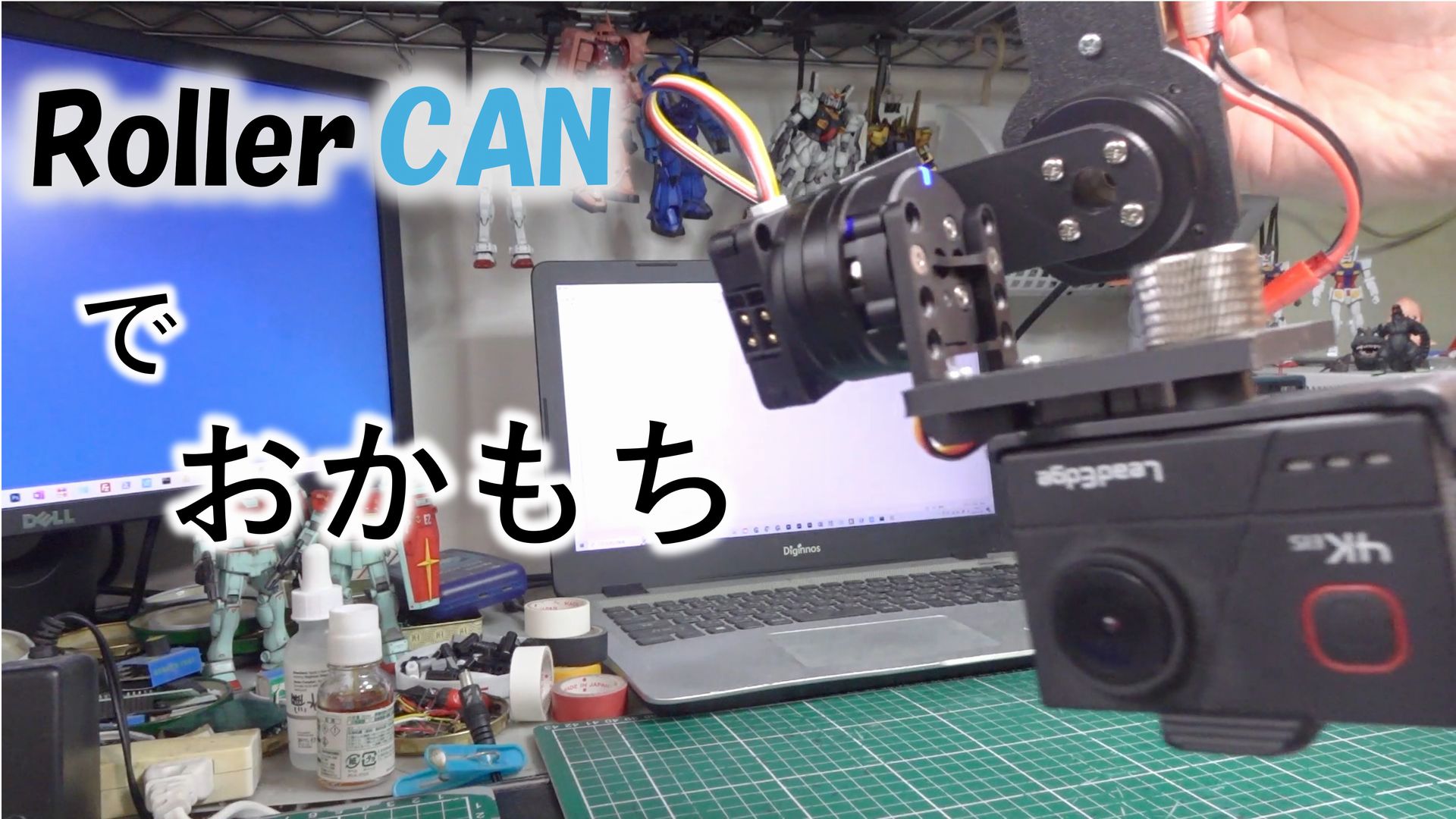
RollerCAN で おかもち
HomeMadeGarbage Advent Calendar 2024 |1日目 時折 "あー おかもち もちてー" と思うことがあり、これまでもサーボモータやブラシレスモータで おかもちを製作してきました。 https://homemadegarbage.com/okamochi/ htt...
Advent Calendar / 電子工作 2024.12.1 お父ちゃん ![]()

玉乗りロボット 深掘り
先日、玉乗りロボットを製作し動作を確認しました。 https://homemadegarbage.com/ballride-01/ ここではモータの再検討と移動動作なども考えてみました。 モータ高速化 モータスピードに不足を感じていたので高速化を目指しました。 ...

玉乗りロボット つくってみた
玉乗りロボットの製作に挑戦いたしましたので報告します。 玉乗りロボット 以前AliExpressサーフィンをしていたところ... これオムニホイールでできるんか! あとBGMが謎 ¥18673.0 6% OFF|二つの開発のボールバランスのとれた球状自...

M5Stack BLDCモータードライバユニット 火入れ
M5Stack用BLDCモータードライバユニットを購入しました。 [bc url="https://www.switch-science.com/products/9651"] もろもろ味見してみたので報告いたします。 1st 火入れ&味見 開封から火入れをライ...
電子工作 2024.5.22 お父ちゃん ![]()
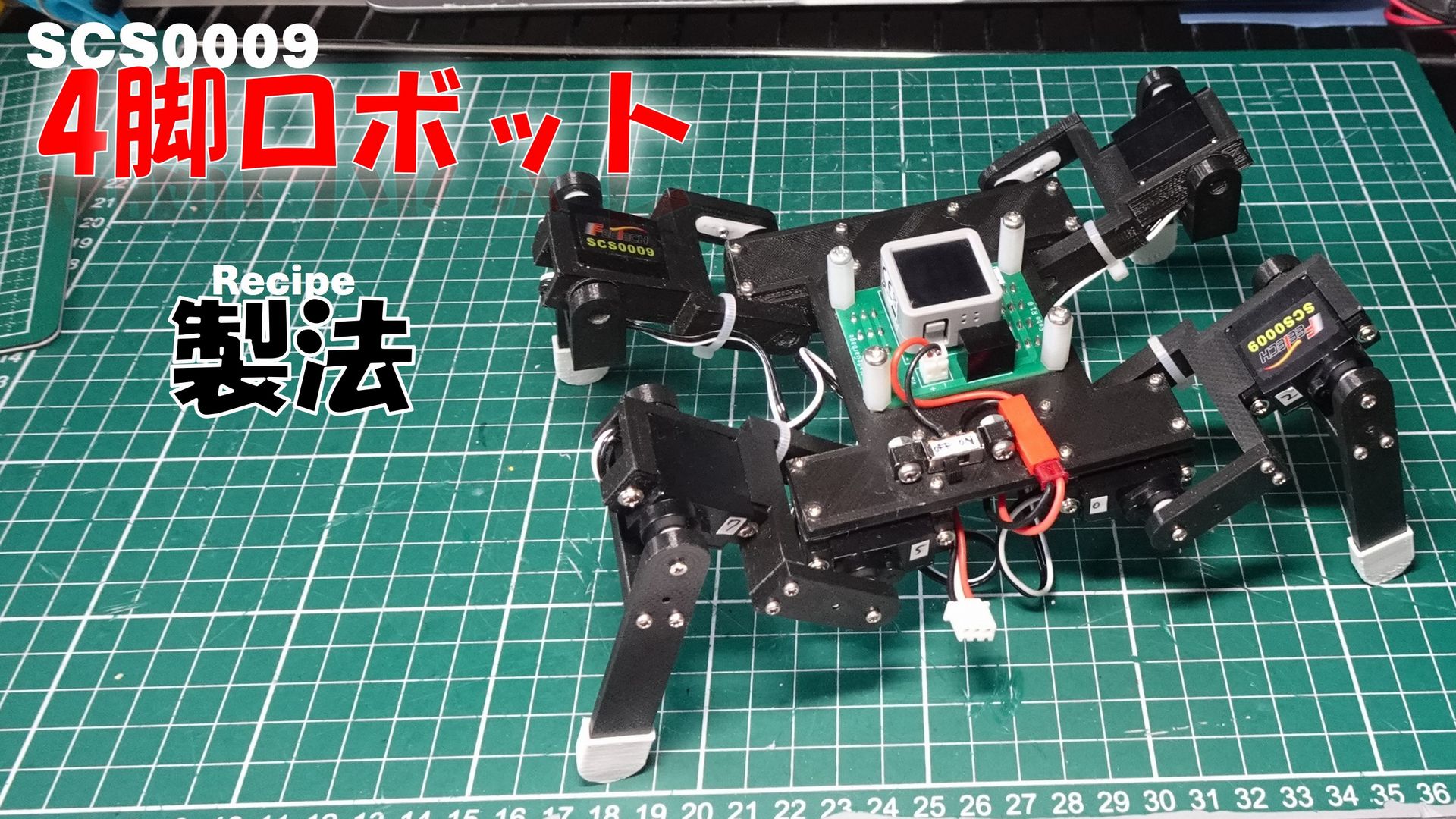
SCS0009を用いた4脚ロボットの製法
はじめに これまでに各種サーボモータを使用して4脚ロボットを製作してきました。 以下の記事ではシリアルサーボの STS3032 と SCS0009 、そしてPWMマイクロサーボでの比較を実施しました。 https://homemadegarbage.com/robotdog03// &nbs...
電子工作 2024.4.23 お父ちゃん ![]()
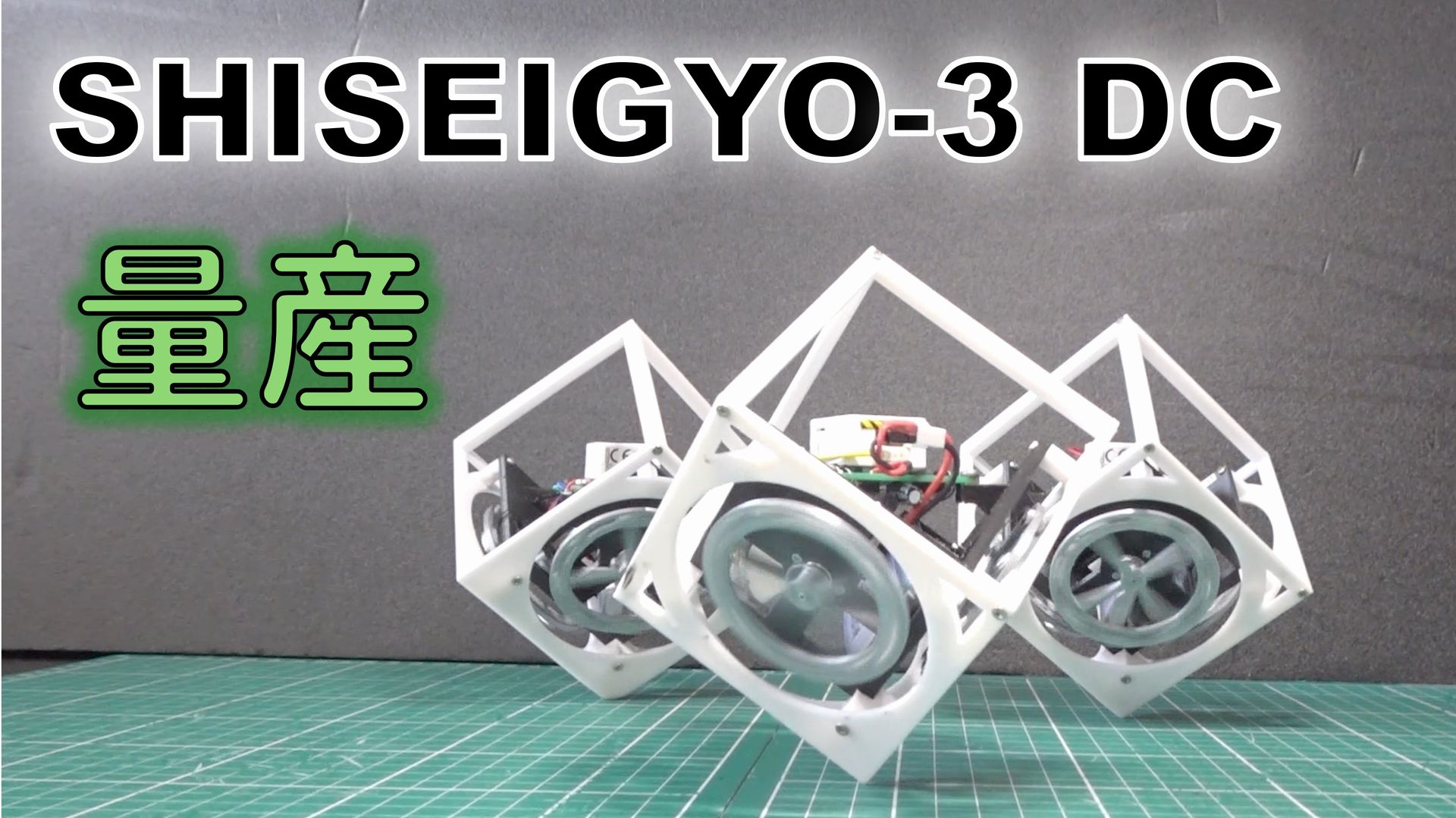
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
前回は小型コアレスモータを用いて3軸姿勢制御モジュールを実現しました。 https://homemadegarbage.com/reactionwheel67// ここでは更にブラッシュアップを施しましたので報告いたします。 基...
電子工作 2024.3.16 お父ちゃん ![]()

SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
魅惑の3連休を前にふとDCモータで3軸姿勢制御モジュール作れないべか? と思い立ちました。 DCモータによる姿勢制御モジュールは1軸はもちろんのこと2軸までは確認済です。 https://homemadegarbage.com/reactionwheel52// 新規案件は準...
電子工作 2024.2.25 お父ちゃん ![]()

6重倒立に向けて③ ーリアクションホイールへの道66ー
前回は5重倒立の検証を実施しました。 https://homemadegarbage.com/reactionwheel65 ここでは遂に6重倒立に挑戦します。 6重倒立 あらためて6重倒立に使用するモジュールについて記載します。 上から以下のように積み上げま...
電子工作 2024.2.12 お父ちゃん ![]()

6重倒立に向けて② ーリアクションホイールへの道65ー
前回は6重倒立の実現に向けて本格的に始動し、4重倒立の確認を行いました。 https://homemadegarbage.com/reactionwheel64// ここでは5重倒立の検証をします。 5重倒立 記録更新 まずはモチベーションの維持と向上のために5...
電子工作 2024.2.7 お父ちゃん ![]()

6重倒立に向けて① ーリアクションホイールへの道64ー
昨年末より6重倒立の達成を目指して、極小のモジュールを製作したり 第6の新規モジュールを製作いたしました。 https://homemadegarbage.com/reactionwheel62// https://homemadegarbage.com/reactionwh...
電子工作 2024.1.31 お父ちゃん ![]()
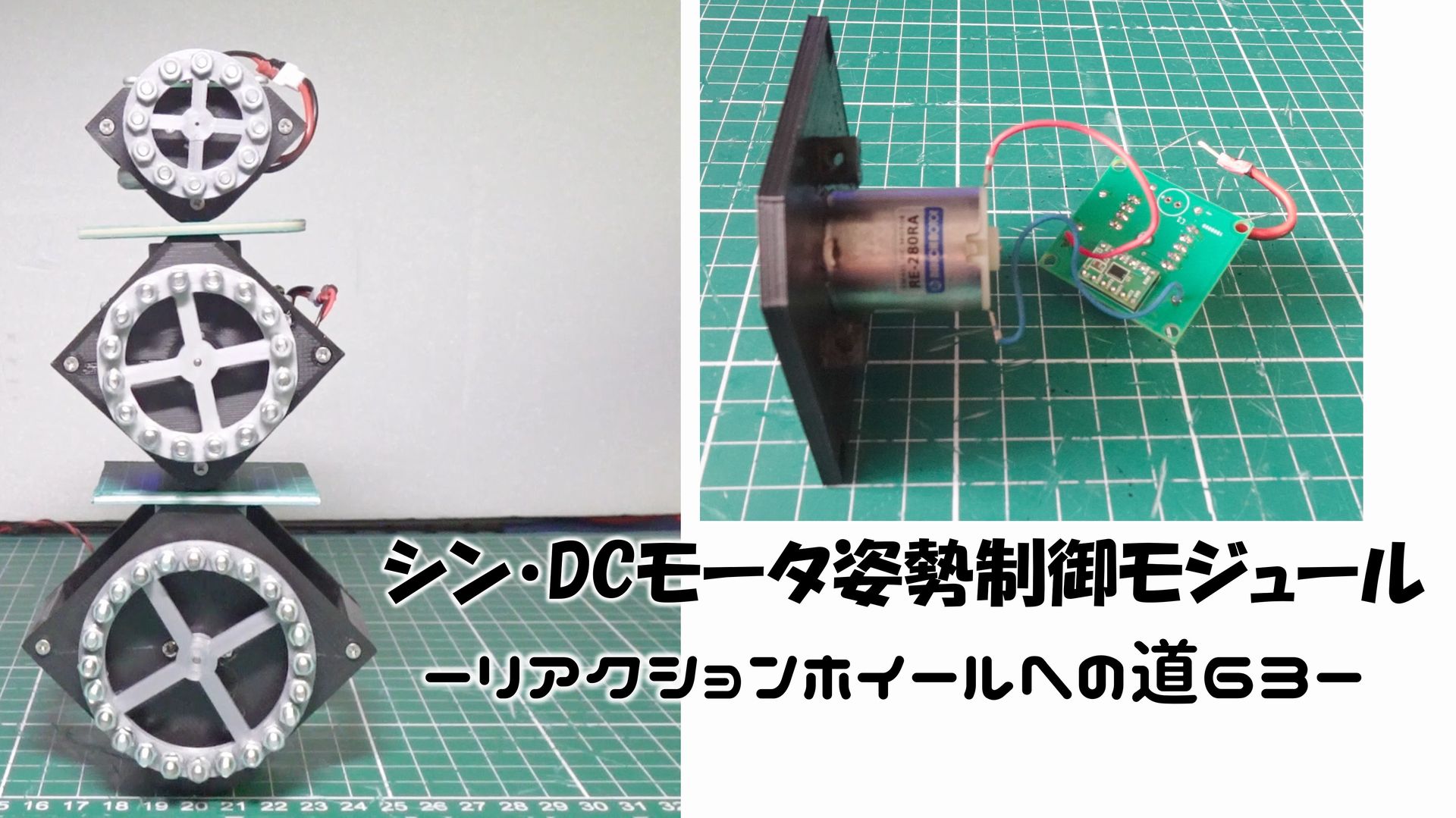
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
HomeMadeGarbage Advent Calendar 2023 |22日目 前回から6重倒立に向けて準備を開始しております。 念願の5重倒立達成 ☟詳細はコチラhttps://t.co/uoq9a3fGf2 pic.twitter.com/3I6DR8jhjV — Ho...
Advent Calendar / 電子工作 2023.12.22 お父ちゃん ![]()
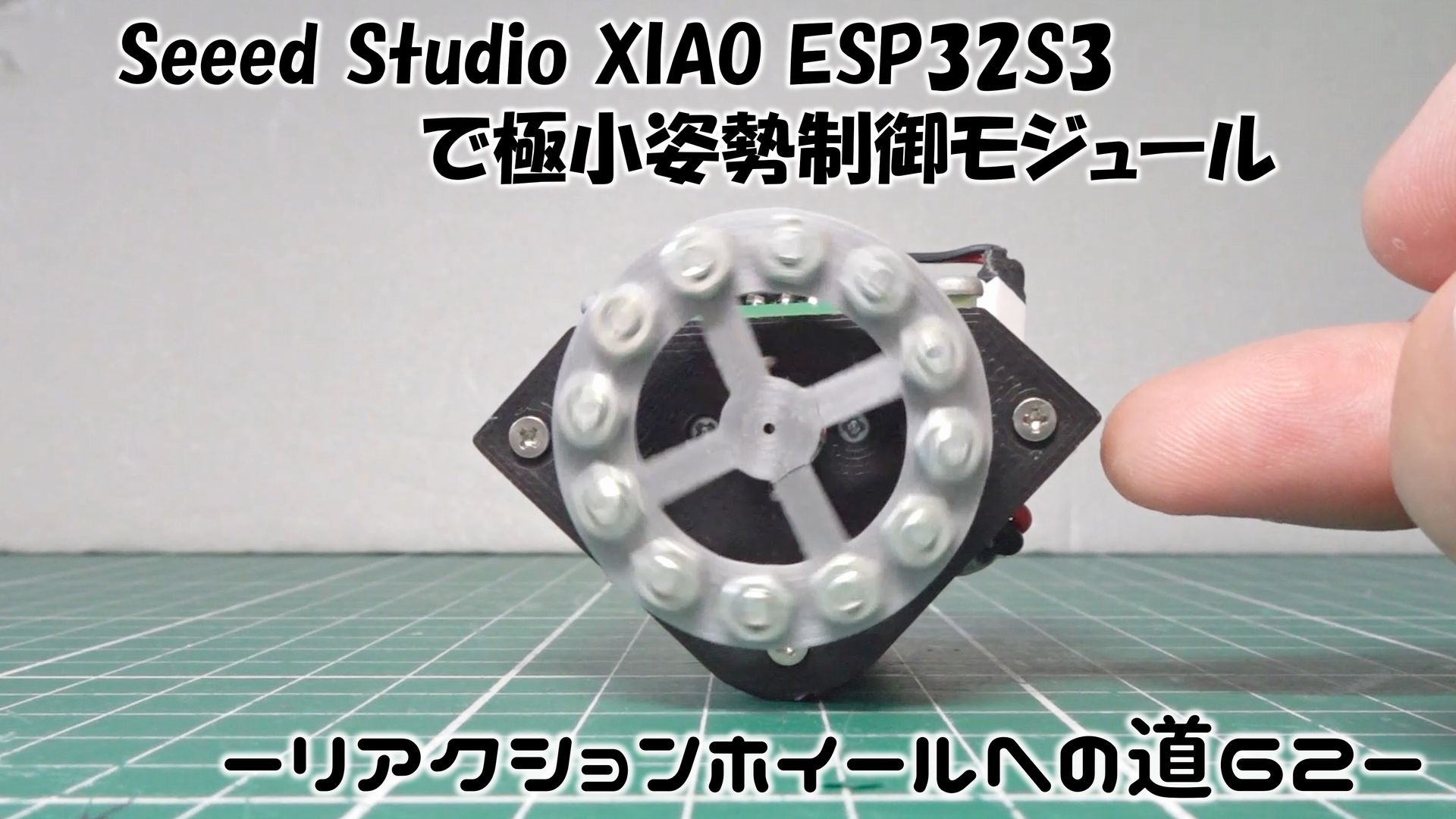
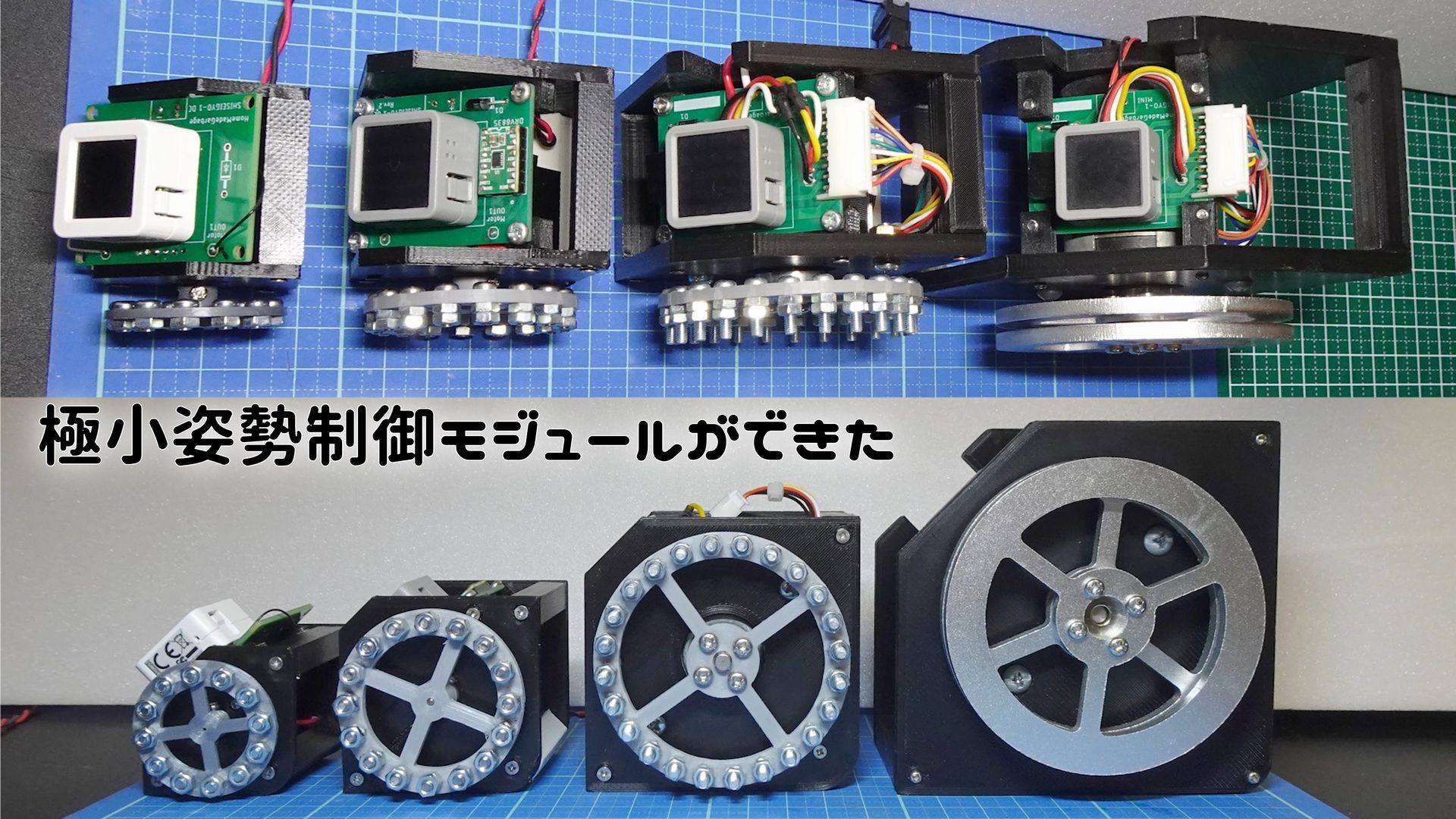
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
HomeMadeGarbage Advent Calendar 2023 |18日目 そろそろ多重倒立がしたくなってきました。たまに来るこの感情 現状の記録は5重。 https://twitter.com/H0meMadeGarbage/status/1640186881903042561 ...
Advent Calendar / 電子工作 2023.12.18 お父ちゃん ![]()

姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
前回は極小姿勢制御モジュールを製作し報告させていただきました。 https://homemadegarbage.com/reactionwheel56/ 製作した極小姿勢制御モジュール "SHISEIGYO-1 DC センサレス Jr." を頂点に多段重ねの倒立も試しました。 ...
電子工作 2023.3.27 お父ちゃん ![]()
極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. ーリアクションホイールへの道56ー
前回は電流センシング機能付きのモータドライバDRV8876を使用してエンコーダなしのセンサレス姿勢制御モジュールを製作しました。 https://homemadegarbage.com/reactionwheel55// ここではミニ四駆用のモータより更に小さいモータを使用して、モジュールの小型...