シリアルリンク 2足歩行ロボットの製作8 ー モーション検討 ー
本記事にはアフィリエイト広告が含まれます。
前回は JLC3DP サービスでチタン製歯車を製作し、ロボに導入して味見してみました。
歯車の具合は非常によく、欠けるなどの心配もなくなりました。
思う存分動作検証できるようになったのでご報告させていただきます。

目次
足形状検討
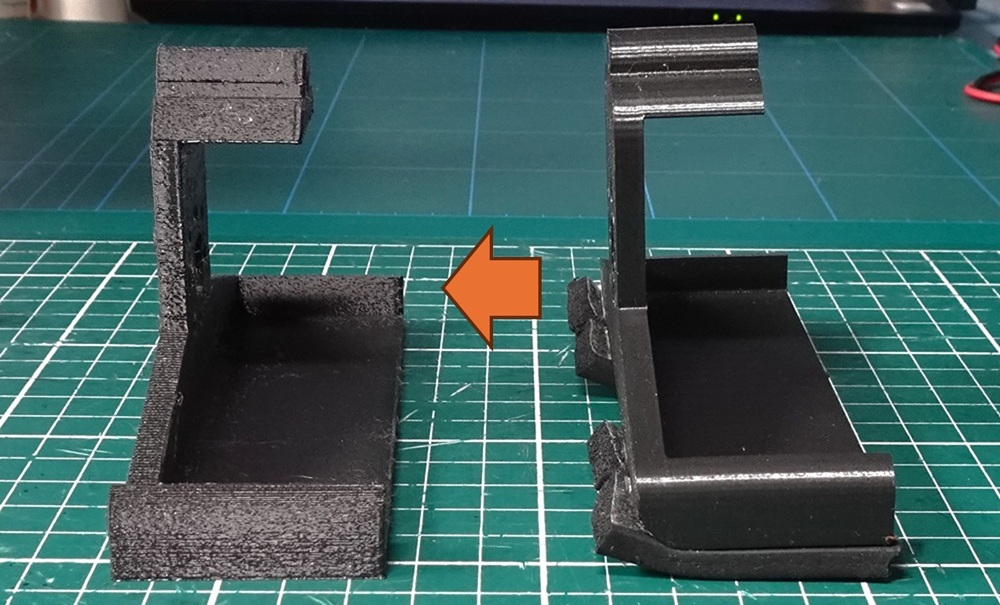
足底の外側を丸めていたのですが、揺れ抑制のために丸めを廃止しました。
新しい足にクッションを貼る
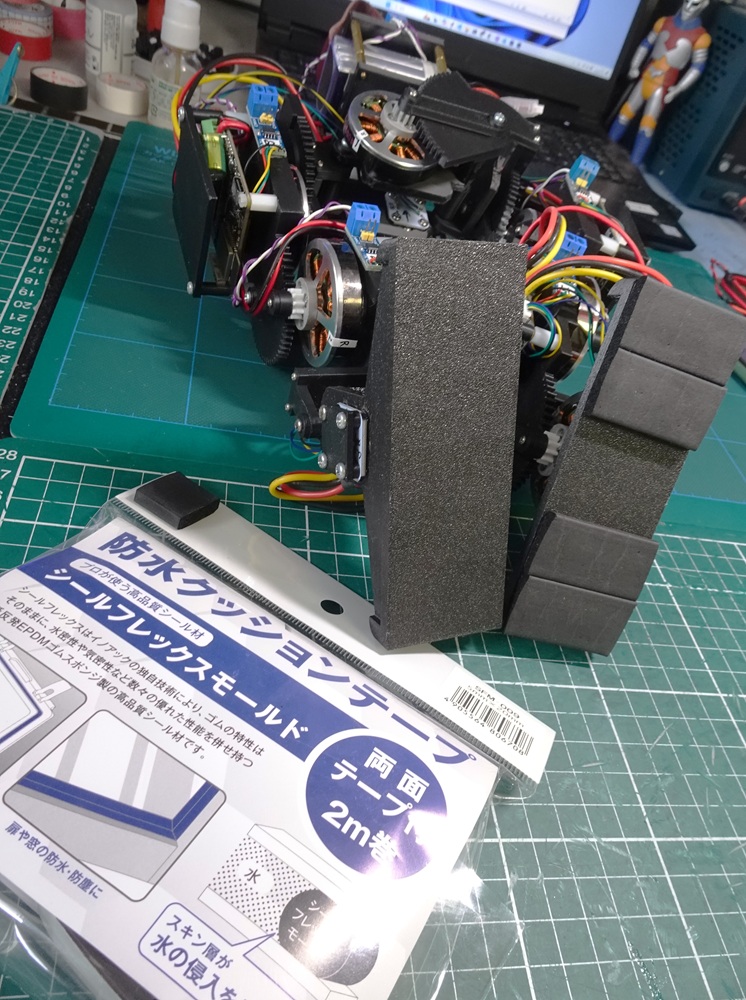
[amazonjs asin=”B00G467NRM” locale=”JP” title=”イノアックコーポレーション イノアック シールフレックスモールド 5X20mmX2m巻 両面テープ付 SFM-009″]
左右の揺れが抑制されました。
足底 外エッジR廃止
多分こっちのほうがいいだろ pic.twitter.com/9vp8bCK76W— HomeMadeGarbage (@H0meMadeGarbage) July 20, 2025
接地検知検討
直近しばらくは周期的なシーケンスを組んで歩行動作の確認を実施してましたが、
ハンドクラフト的に全然面白くないので以前のようにセンシングによる半自動歩行を目指します。
半自動歩行に戻した。
もう少しだけトルクに余裕があればな pic.twitter.com/SSiDmKRqbz
— HomeMadeGarbage (@H0meMadeGarbage) June 21, 2025
接地をモータトルクで検出して、他方の足上げ動作に移行するのだが あまりスムーズにいってない。。
接地検出は左右の足首モータのトルク差で検出しているのですが、あまりうまくいってないようでした。
トルク検知 pic.twitter.com/rPSCOkr9I5
— HomeMadeGarbage (@H0meMadeGarbage) May 1, 2025
接地検出を足首モータからヒザモータのトルクに変更したところスムーズな左右足上げ動作切り替えが実現できました。
接地検知を足首トルクからヒザモータのトルクに変更
スムーズな足踏みできるようになったわ
(ピッチ角補正で足首動いて回転しちゃってるけど。。)過去の俺はなんで足首で検知しようと思ったのだろう? pic.twitter.com/NSovtlbg3U
— HomeMadeGarbage (@H0meMadeGarbage) July 23, 2025
単純に接地検出に用いるモータの選択を誤っていました。
普通に考えてヒザで検出だよな。
歩行検討
接地検出が改善したので歩行動作のブラッシュアップを目指します。
ピッチ補正改善
機体のピッチ角の傾き補正を足首で実施しているのですが、歩行時に補正が過ぎて前後にふらふらすることがあります。
ヒザモータトルクでの接地検知による半自動歩行
だいぶいい
というか以前の足首モータでのトルク検知がマズかったわ pic.twitter.com/bp2Q7hhVlN— HomeMadeGarbage (@H0meMadeGarbage) July 24, 2025
足上げ前に地面を蹴り上げる際の蹴り上げ足のピッチ補正のみ無効しました。
前後の揺れは少し改善したべか
蹴り上げ時に蹴り上げ足のピッチ補正無効
少し改善したべか pic.twitter.com/tGmwnBhdPC— HomeMadeGarbage (@H0meMadeGarbage) July 25, 2025
足動作軌道リニア
足の上下の動作を正弦波形で実施していたのですが、処理のもたつきを感じたので
上下移動を時間的に線形にしてみました。
足上げ位置 正弦波形 vs 線形
大した差はないようだ
じゃあリニアで十分だわ pic.twitter.com/3sum12rf7X— HomeMadeGarbage (@H0meMadeGarbage) July 26, 2025
処理が軽くなり足の上りも高くなったので線形を採用します。
おわりに
モータギアがチタン製で超頑丈になったので思う存分動作検証ができるようになりました。
— HomeMadeGarbage (@H0meMadeGarbage) July 26, 2025
モータトルクがちょっと足りてないな (特にヒザ) と感じつつも
少しづつ動作が改善してきました。
引き続きこのシリアルリンク 2足歩行ロボットの検証を進めてまいりたいと思います。
ほな