Fusion360
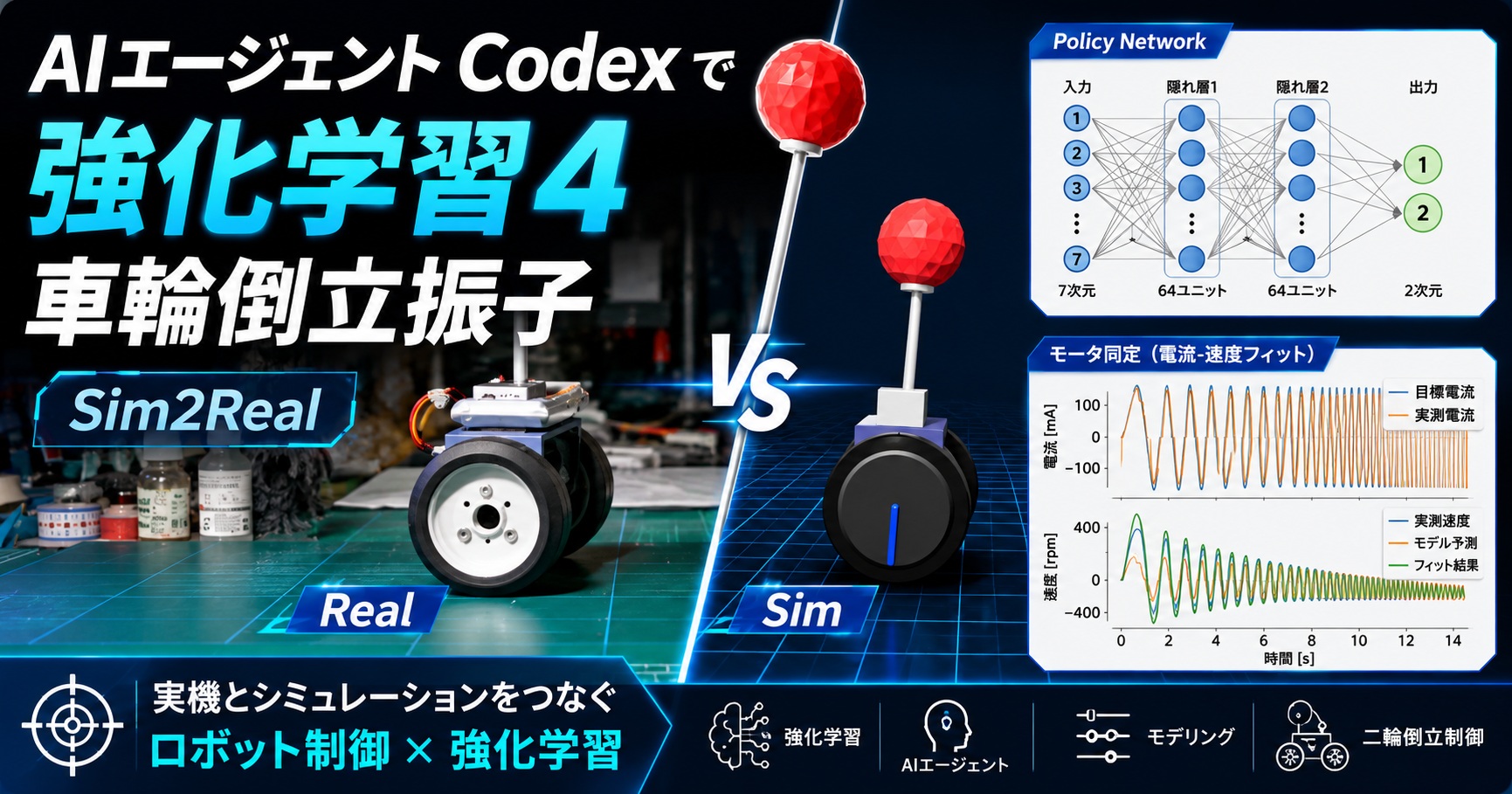
AIエージェント Codex で 強化学習4 車輪倒立振子
最近はCodexを当たり前のように使って生活しており、 わざわざ "AIエージェント Codex を使ってます" なんてことを言うのも今回が最後になるのではないでしょうか? ここでは以前挑戦したゲームコントローラで操作する倒立振子の強化学習に再挑戦します。 ROBSTRIDE 05 倒立...
電子工作 2026.6.23 お父ちゃん ![]()

AIエージェント Codex で 強化学習3 起き上がり4脚ロボット
前回はAIエージェント Codex で簡素な2軸の起き上がりロボの強化学習を実施いたしました。 https://homemadegarbage.com/rl13// 簡単なPWMサーボでも強化学習によって見事な起き上がりロボになりました。 フィジカルAIって、心を鬼にしないといけない...
電子工作 2026.6.15 お父ちゃん ![]()

AIエージェント Codex で 強化学習2 起き上がりロボ
前回はAIエージェント Codexに強化学習を実施してもらい2足歩行ロボットのバランス動作を実現しました。 https://homemadegarbage.com/rl12// Codex先生が学習の環境構築、報酬設計、学習フローすべて考えてくださり、長年憧れていた動作ができました。 C...
電子工作 2026.6.11 お父ちゃん ![]()

AIエージェント Codex で ドローン2MuJoCo で シミュレーション
前回はAIエージェント Codex を活用してドローンの学習を開始しました。 https://homemadegarbage.com/drone04/ Codex先生のおかげで姿勢制御やゲームコントローラによる位置制御を数日で実現できてしまいました。 Codex先生にドローン制御コー...

すごい Wheel-legged ロボに憧れて3
前回は Wheel-legged Robot 直立モード時の歩行動作の検証を実施しました。 https://homemadegarbage.com/bala32// 安定歩行実現のために足を改良して平行リンク機構を導入したので、ここでは再度倒立モードの検証を実施します。 ...

すごい Wheel-legged ロボに憧れて2
前回は Agibot社の X2-N に憧れて自分なりのWheel-legged Robot を製作しました。 倒立モード / 直立モードの移行まで検証いたしました。 https://homemadegarbage.com/bala31/ ここでは直立モード時の歩行動作の検証を実...
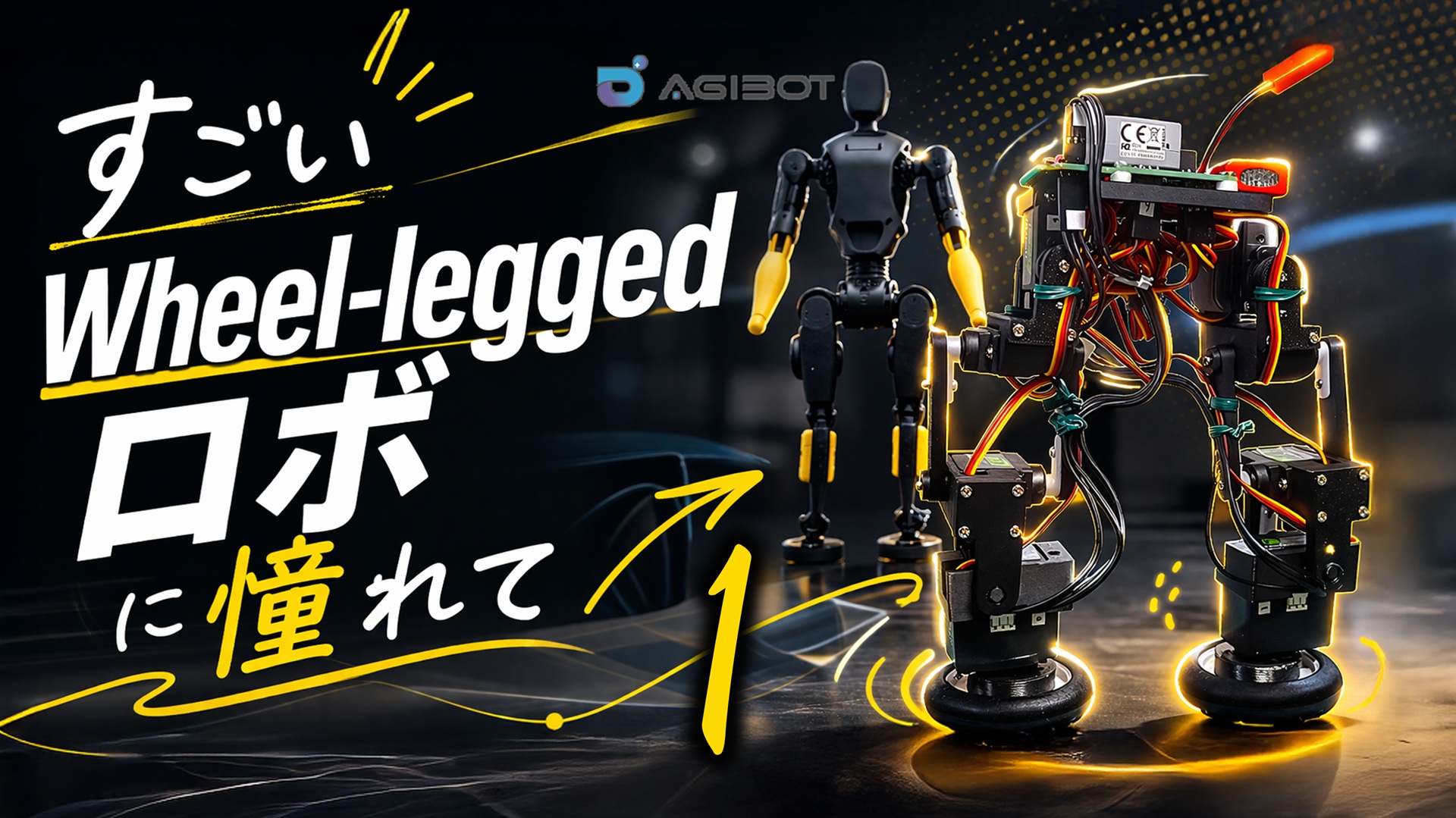
すごい Wheel-legged ロボに憧れて1
すごいロボットをネットで見たんです (ここ最近は毎日すごいロボ情報に驚かされていますが。。)。 これめっちゃいい 是非自身でも味わいたい!!https://t.co/YUFlAUaXWs — HomeMadeGarbage (@H0meMadeGarbage) July 6, 20...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ3
前回はQDDモータ Robstride 05を用いた1輪倒立振子の倒立走行動作の強化学習を実施しました。 https://homemadegarbage.com/robstride-rl02 ゲームパッドのジョイスティック入力(走行速度)も観測ベクトルに組み込んで学習して実機でも見事に動作確認で...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ2
前回は強化学習による Robstride 05 倒立振子の安定倒立動作を実現しました。 https://homemadegarbage.com/robstride-rl01 ここでは倒立振子の走行動作を強化学習で実現したいと思います。 走行は以下のようにゲームパッドのジョイスティックで速...

ROBSTRIDE 05 倒立振子を強化学習で楽しむ1
以前に制作したQDD Robstride 05 を用いた倒立振子を強化学習で楽しみたいと思います。 Robstride 05 倒立振子 pic.twitter.com/AhgOQN9DT1 — HomeMadeGarbage (@H0meMadeGarbage) February 23,...

クローラー倒立ボット MorphCrawlerBot
去年 (2025年) 完成させたクローラー倒立ボット MorphCrawlerBot を先日改修して 去年の連載記事に追記という形で記載したのですが、埋もれてもったいないので改めて粒だてたいと思います。 https://homemadegarbage.com/bldcservo10// &nb...
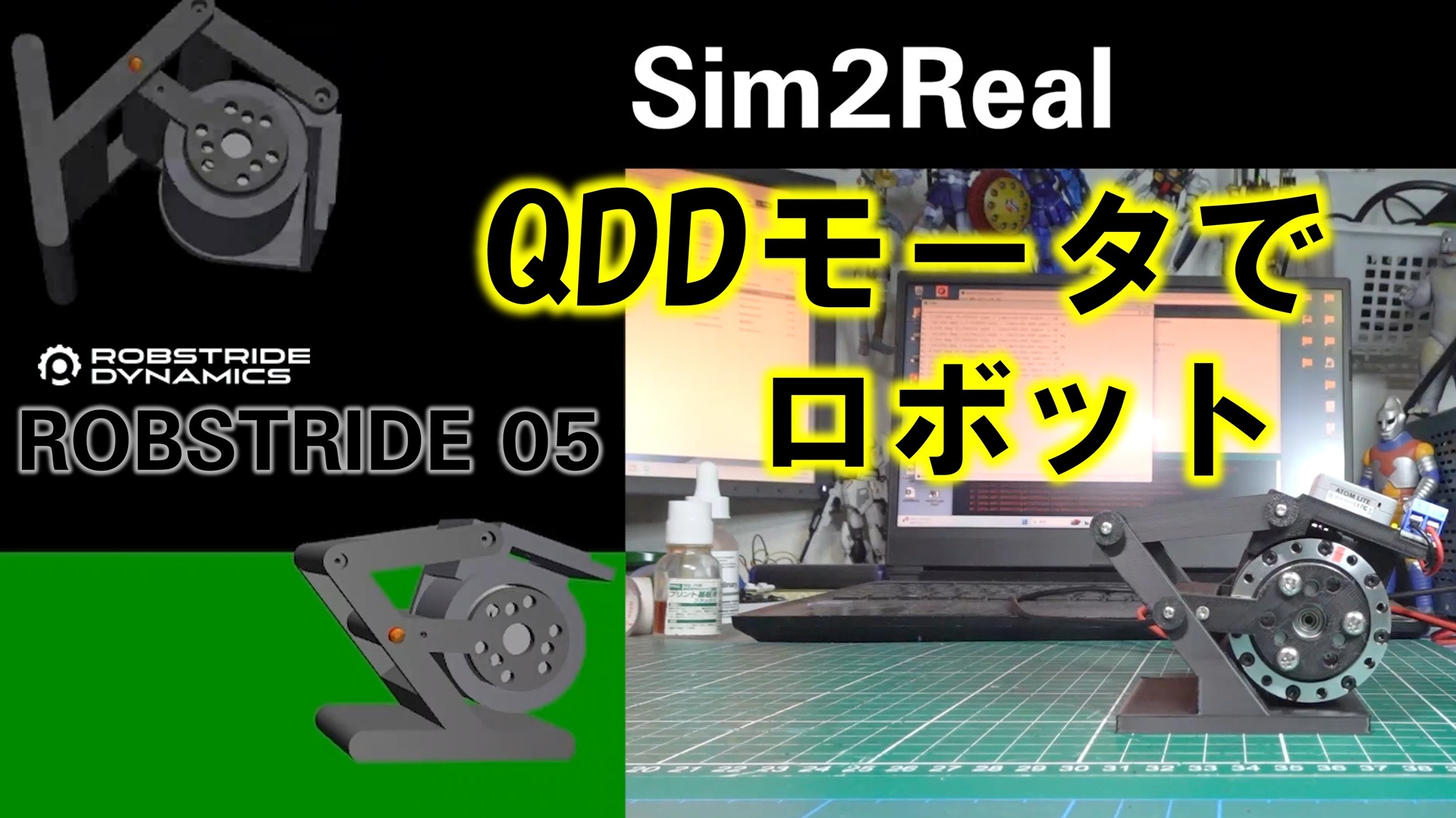
QDDモータでロボットー ROBSTRIDE 05 ー
前回はQDD ロボットモータ ROBSTRIDE 05 を入手し もろもろおいじりして基本動作を理解しました。 https://homemadegarbage.com/robstride01 ここでは前回の姿勢制御モジュールに続いて足ロボを製作してQDDモータの性能を楽...
電子工作 2025.9.13 お父ちゃん ![]()
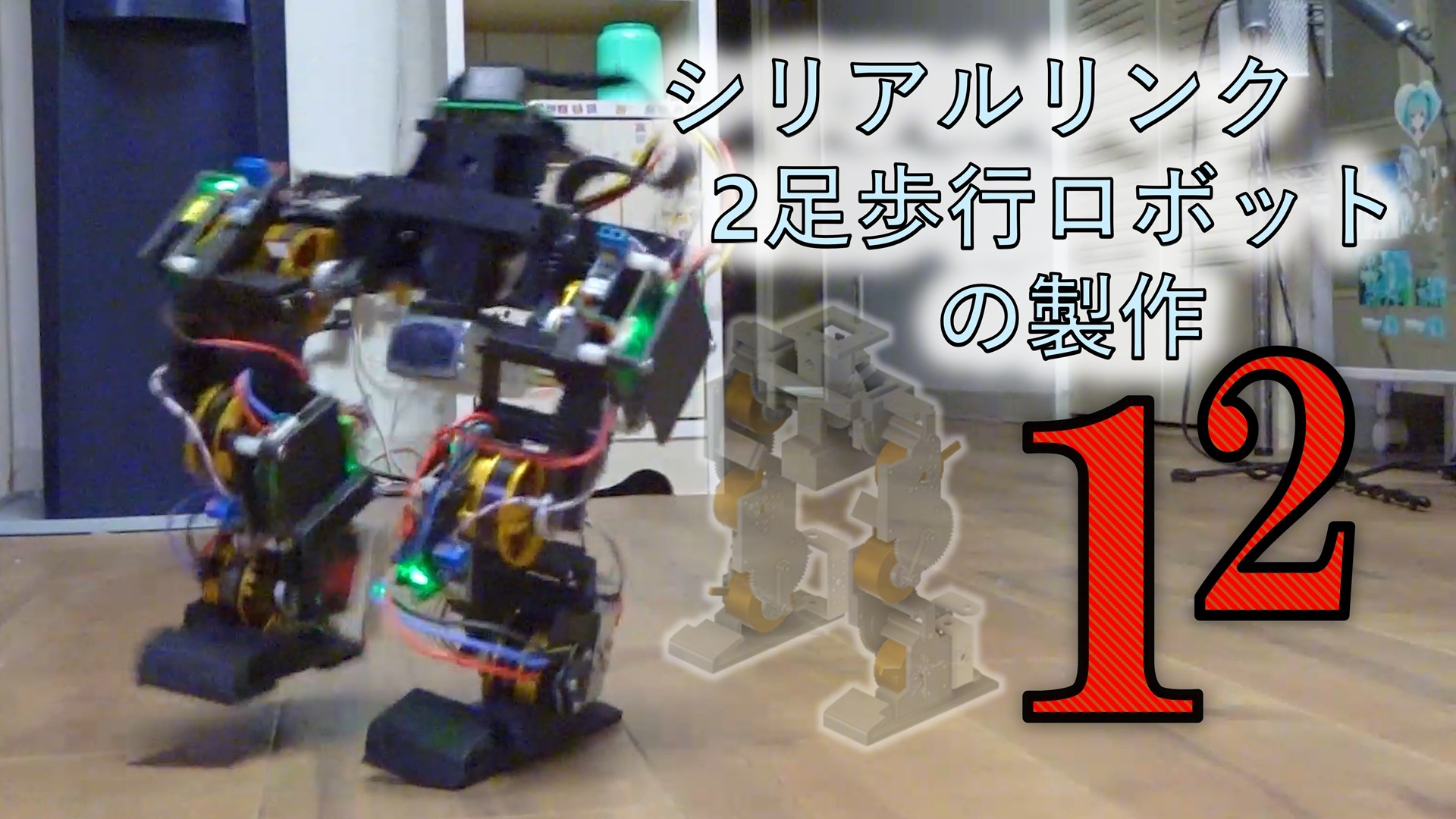
シリアルリンク 2足歩行ロボットの製作12 ー 完成 the FINAL ー
前回は かかとYaw軸や体幹Roll軸といった新しい機構の検証を実施しました。 https://homemadegarbage.com/seriallink11/ 改良は概ね良い結果が得られ大変に喜びました。 今回は最終仕上げとしまして、以前ヒザのブラシレスモータを BE410...
電子工作 2025.8.22 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作11 ー もろもろ改造 ー
前回はシリアルリンク 2足歩行ロボットのヒザモータをブラシレスモータ BE4108 380KVに変更して動作を確認しました。 https://homemadegarbage.com/seriallink10/ 今回はかなり踏み込んだ改造をもろもろ実施したので報告いたします。 &...
電子工作 2025.8.17 お父ちゃん ![]()

シリアルリンク 2足歩行ロボットの製作10 ー モータ変更 ー
前回は股関節ユニットのRoll軸をYaw軸に改造して、旋回動作を楽しみました。 https://homemadegarbage.com/seriallink09 シリアルリンクだとヒザモータの負担が大きく。もっとトルクやスピードを大きくしたいなと常々思っておりました。 &nbs...
電子工作 2025.8.9 お父ちゃん ![]()