Blynk
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。 https://homemadegarbage.com/onewalkersan10// ここでは足を改良して旋回動作できるようにしましたので報告します。 ...
電子工作 2023.3.13 お父ちゃん ![]()
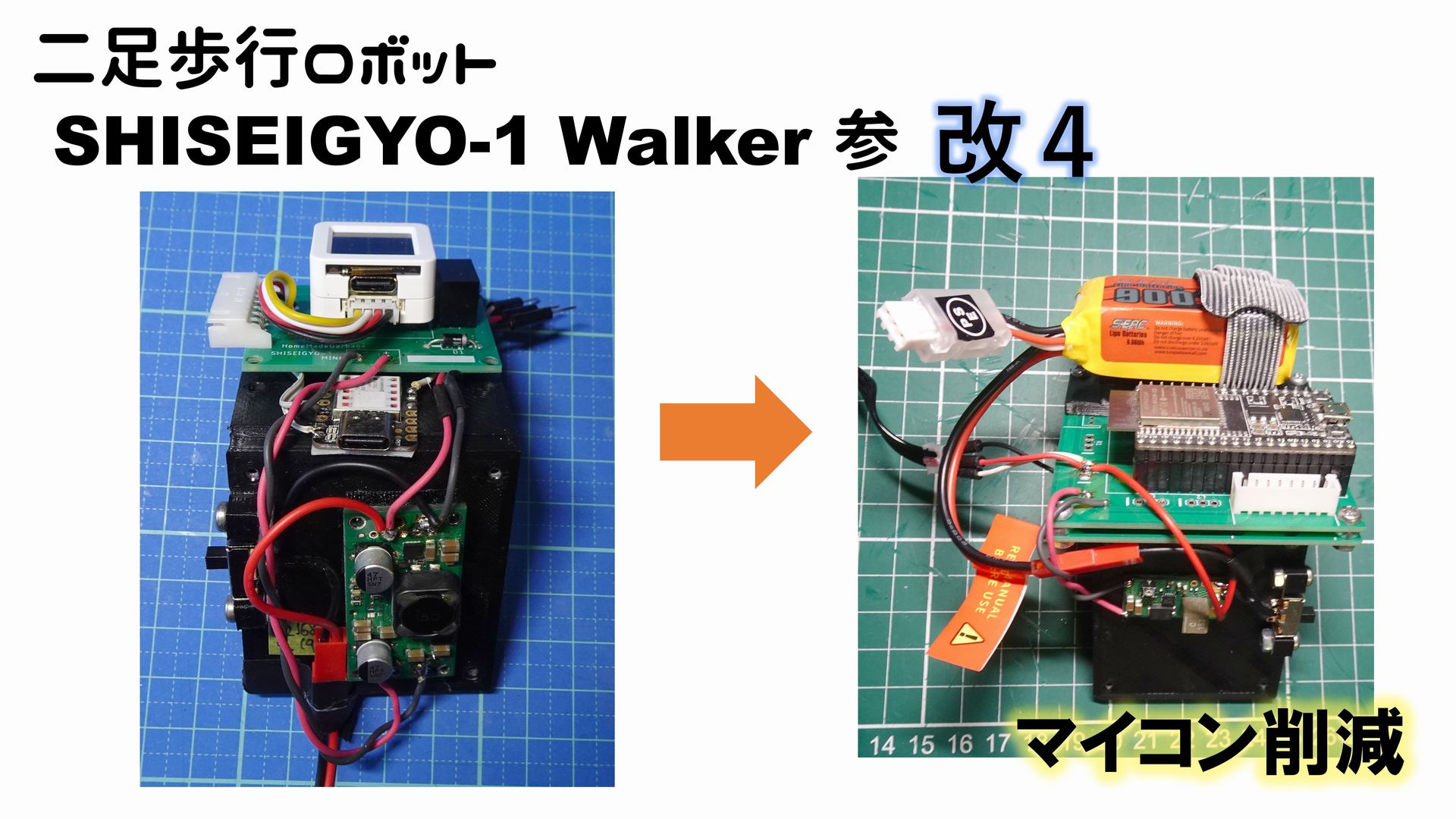
二足歩行ロボット SHISEIGYO-1 Walker 参 改 4
これまでSHISEIGYO-1 Walker 参 の改良版についてはマイコンを2台使用して制御していたが、今回削減をはかったので報告します。 https://homemadegarbage.com/onewalkersan09/ 従来システム構成 以下がこれまでの...
電子工作 2023.3.8 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 改
これまでは SHISEIGYO-1 Walker 参 の足を改良して二足歩行動作を検証してきました。 https://homemadegarbage.com/onewalkersan09 ここでは 初代 SHISEIGYO-1 Walker の足を改良して歩行動作の検証を実施しま...
電子工作 2023.3.7 お父ちゃん ![]()
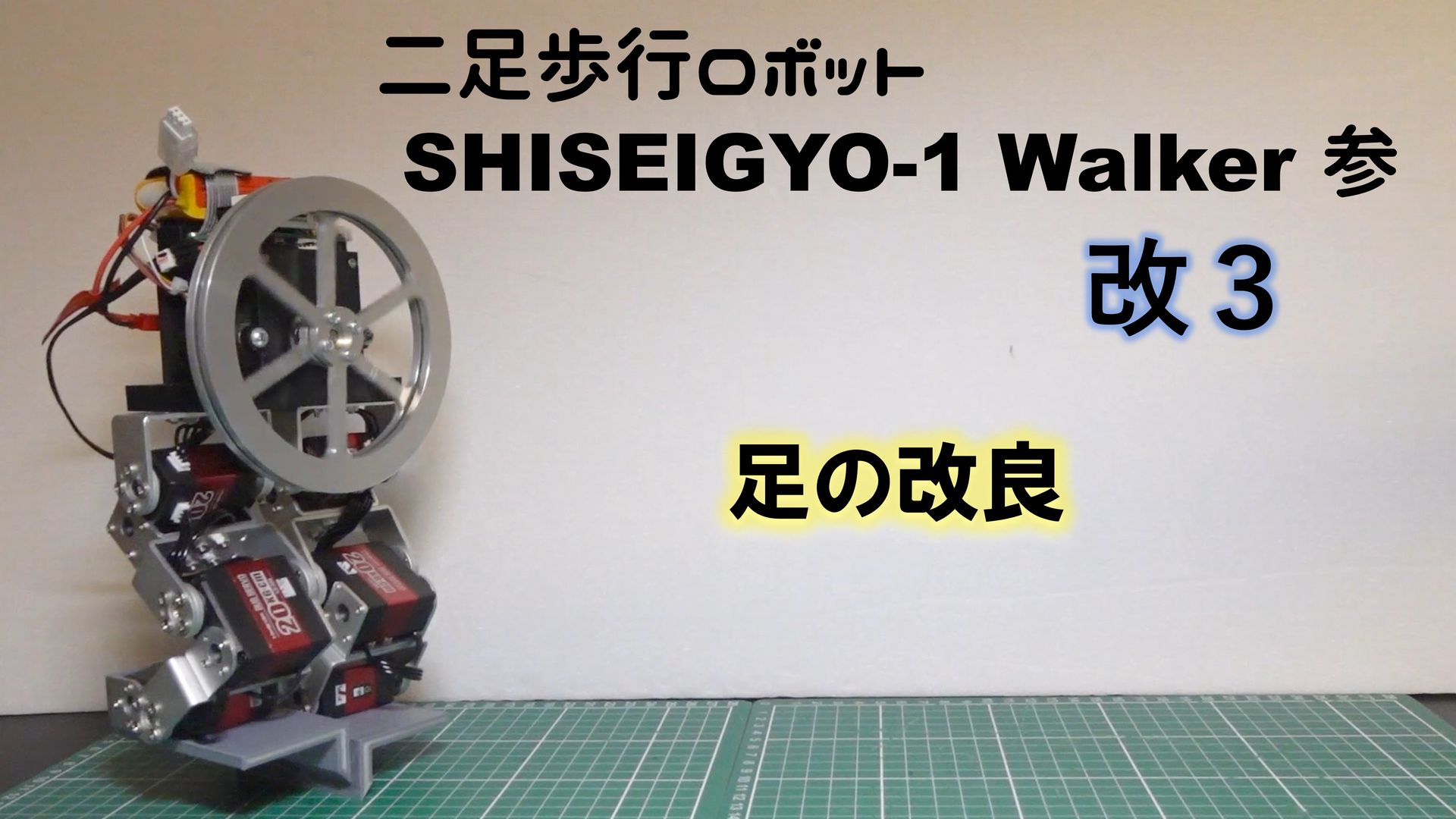
二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。 https://homemadegarbage.com/onewalkersan08// ここでは、通常の足に戻して再度歩行動作の検証を行いました。 ...
電子工作 2023.2.24 お父ちゃん ![]()
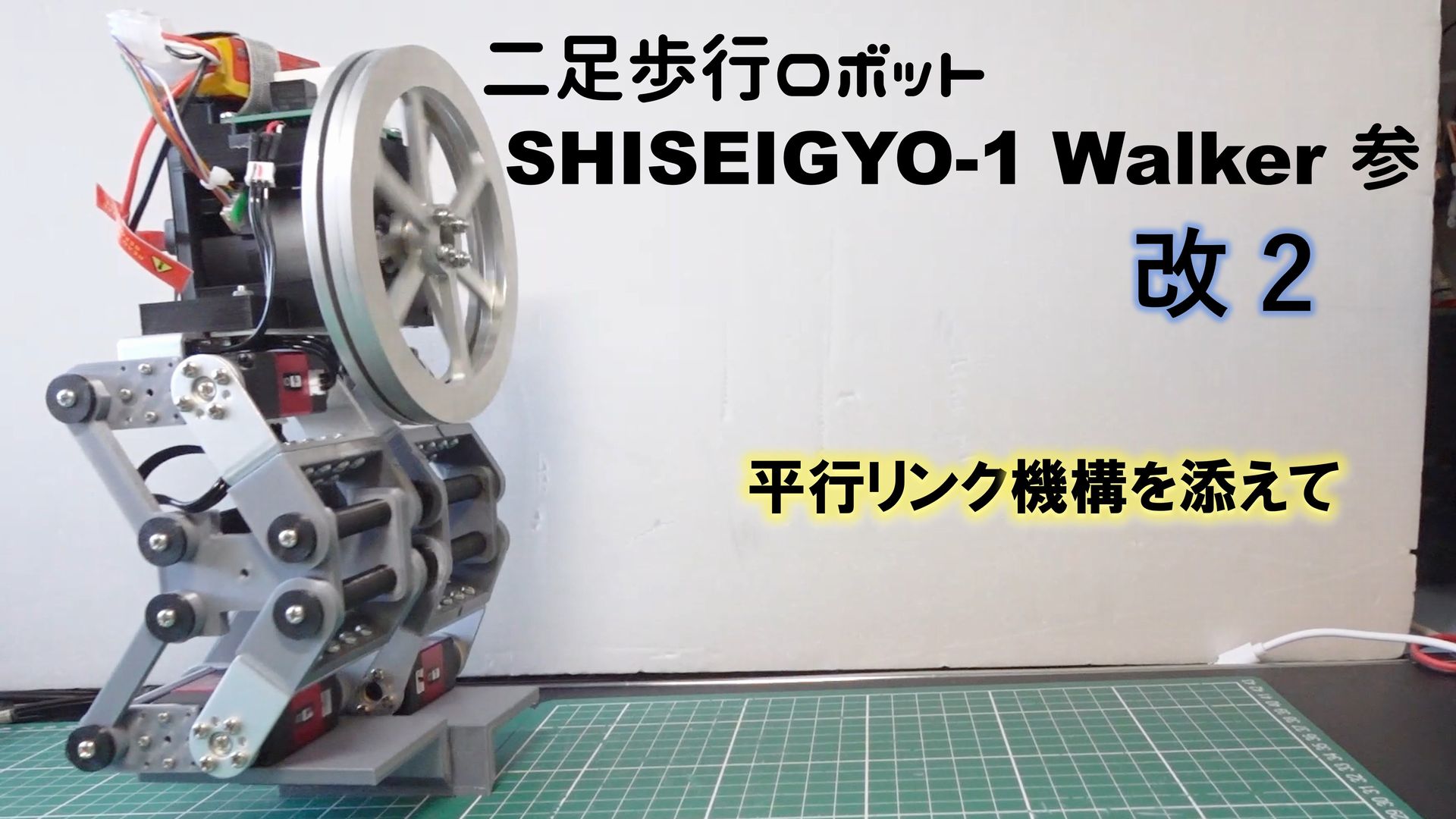
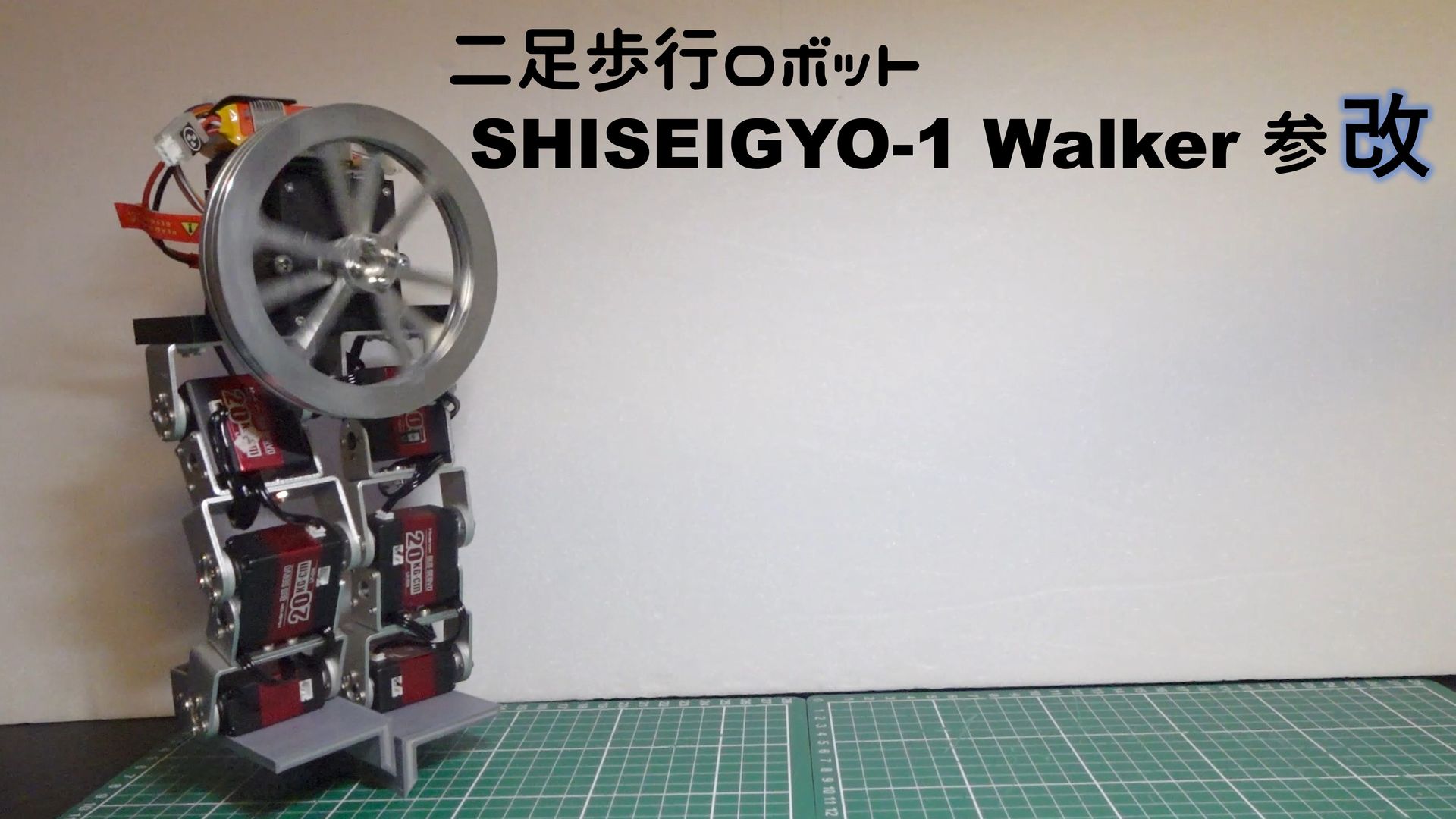
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改
以前 製作した SHISEIGYO-1 Walker Jr. の足のブレードの距離を開けてみたところ。。。 SHISEIGYO-1 Walker Jr. 足を1枚のブレード状につけてないといけないと思っていたけど 離してもいけるなぁ IDRS (倒立角動的再調整システム) が効いてる...
電子工作 2023.2.17 お父ちゃん ![]()
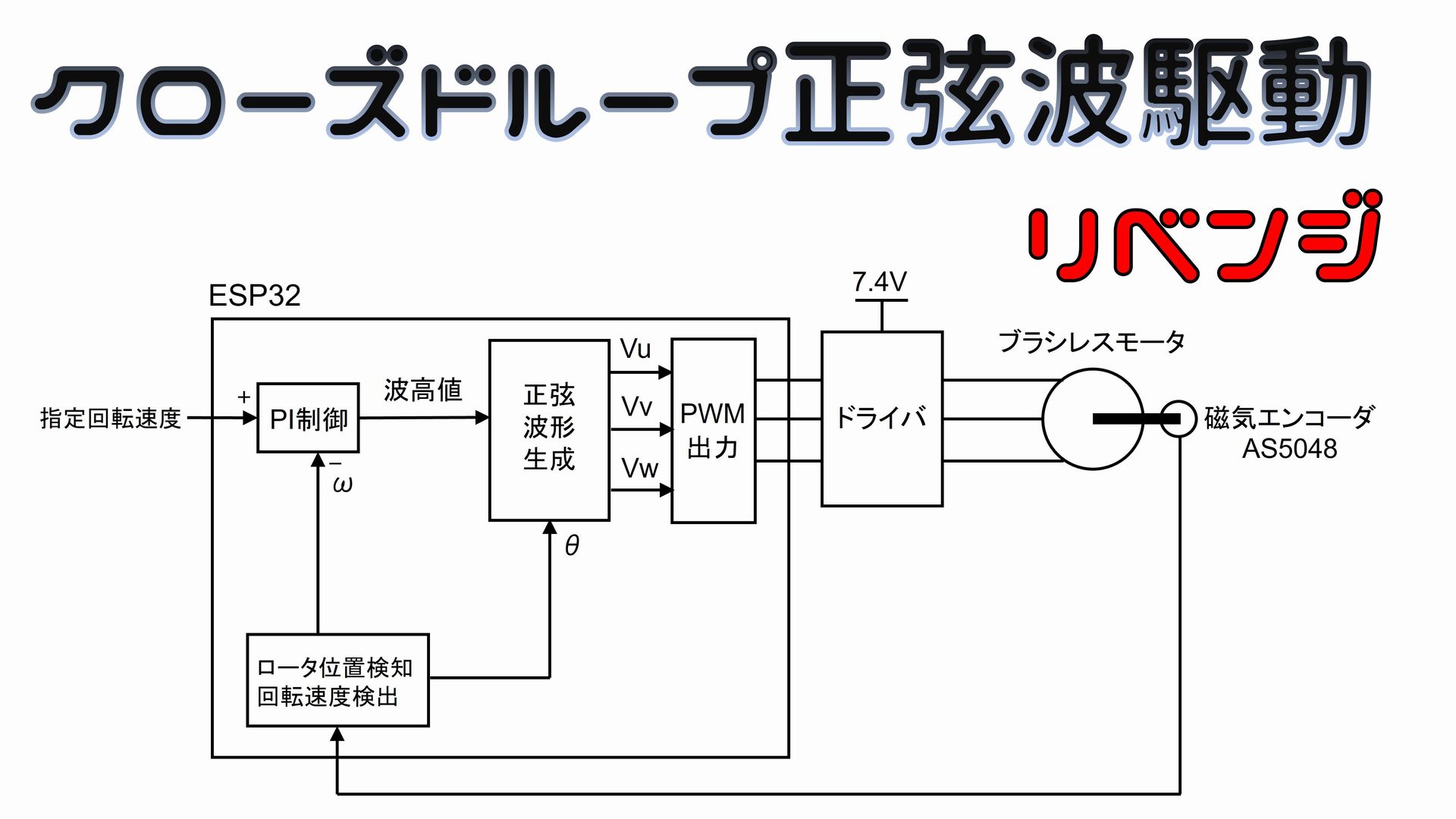
クローズドループ正弦波駆動 リベンジ ーブラシレスモータ駆動への道10ー
HomeMadeGarbage Advent Calendar 2022 |14日目 前回は “50日後にセンサレスベクトル制御してみたい俺” の時に実施したESP32を用いたブラシレスモータのセンサありベクトル制御について報告しました。 https://homemadegarbage.com/...
Advent Calendar / 電子工作 2022.12.14 お父ちゃん ![]()
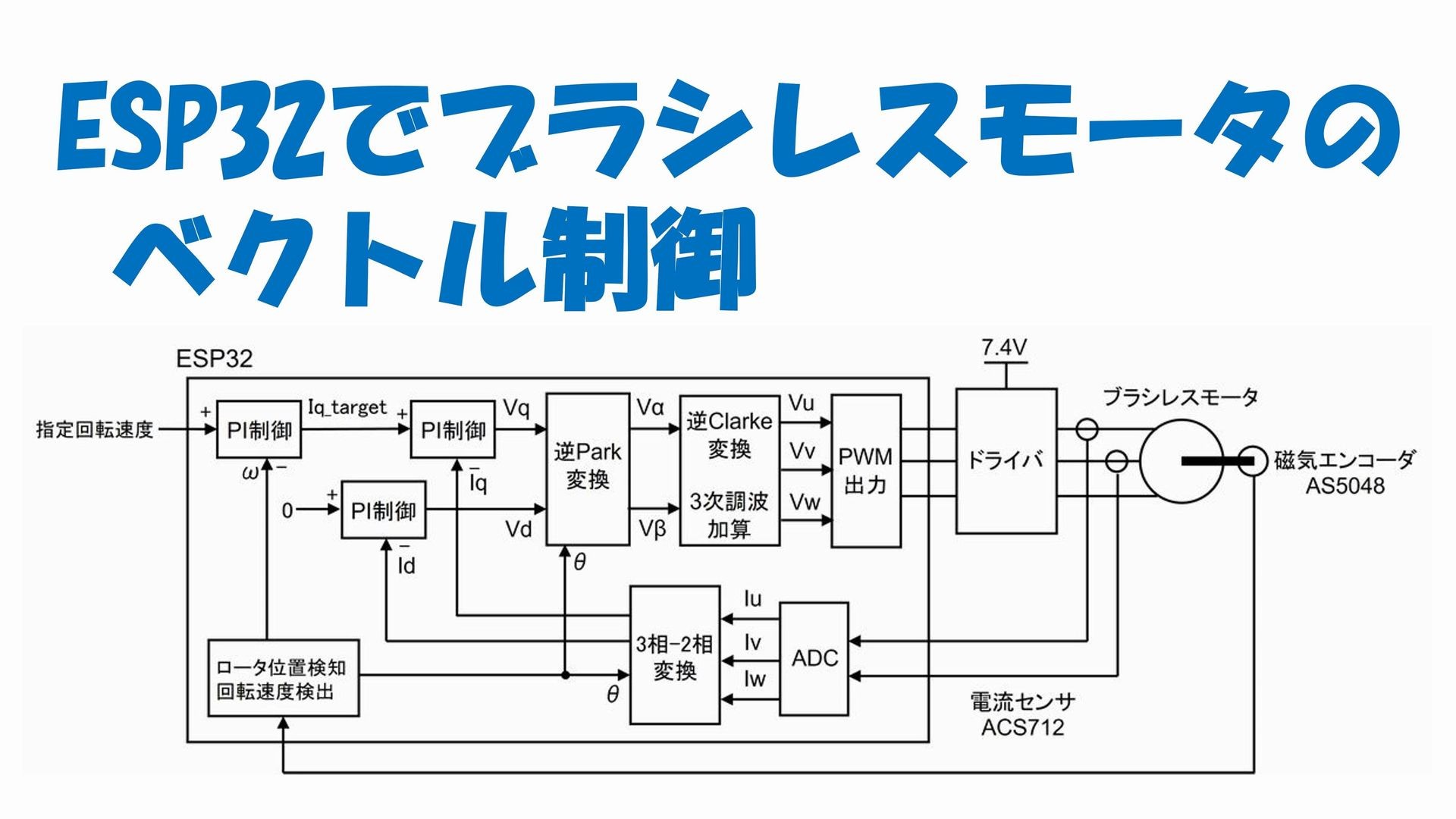
ESP32でベクトル制御 ーブラシレスモータ駆動への道9ー
HomeMadeGarbage Advent Calendar 2022 |12日目 “50日後にセンサレスベクトル制御してみたい俺” と銘打って毎日少しずつモータの勉強を進めていたことを先日ブログにて報告させていただきました。 https://homemadegarbage.com/brush...
Advent Calendar / 電子工作 2022.12.12 お父ちゃん ![]()
50日後にセンサレスベクトル制御してみたい俺 (後編)
HomeMadeGarbage Advent Calendar 2022 |8日目 前回からの続きです。 https://homemadegarbage.com/brushless07 ここからいよいよベクトル制御を目指していきます。 システム構成 回路構成は以下の通り...
Advent Calendar / 電子工作 2022.12.8 お父ちゃん ![]()
次期モデル Mini Pupper 2 でダンス
前回は提供いただいた新モデル Mini Pupper 2 の初期サンプルをArduino IDEで動作開発できるようにいたしました。 https://homemadegarbage.com/minipupper2-01 ここでは更に動作のバリエーションを増やしてダンスに挑戦いたしました。...
電子工作 2022.10.3 お父ちゃん ![]()
次期モデル Mini Pupper 2 の初期サンプルを味わう
なんとロボット犬 ミニぷぱの新モデル Mini Pupper 2 の初期サンプルを提供いただけました! ここでは前機種との違いを実感しながら Arduino IDEで動作させるところまで記載いたします。 https://homemadegarbage.com/minipupper01/ ...
電子工作 2022.10.2 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
前回はSHISEIGYO-1 Walker 参 の歩行動作の実現を確認できました。 https://homemadegarbage.com/onewalkersan05// SHISEIGYO-1 Walker 参はリアクションホイールでバランスをとり、格安シリアルサーボLX-244で構成された...
電子工作 2022.9.13 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
だいぶ期間があいてしまいましたが、シリアルサーボLX-244で足を構築しリアクションホイールでバランスをとる二足歩行ロボット"SHISEIGYO-1 Walker 参" の歩行検討を実施いたしました。 前回は歩行動作の自動化を目指し歩行動作をプログラミングしましたが上手くいかず、サーボのギアに...
電子工作 2022.9.8 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
前回はシリアルサーボLX-244で構築した足の形状を検討し、遠隔で足の位置を手入力で指定しながら足を交差させての一歩を踏み出すことができました。 https://homemadegarbage.com/onewalkersan03/ ここでは手動による足座標指定ではな...
電子工作 2022.7.9 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
前回はシリアルサーボLX-244で2足を構築し、リアクションホイールによる自立動作を確認しました。 https://homemadegarbage.com/onewalkersan02/ ここからはついに歩行に向けて検証進めたいと思います。 足の形状検討 歩行検...
電子工作 2022.7.1 お父ちゃん ![]()