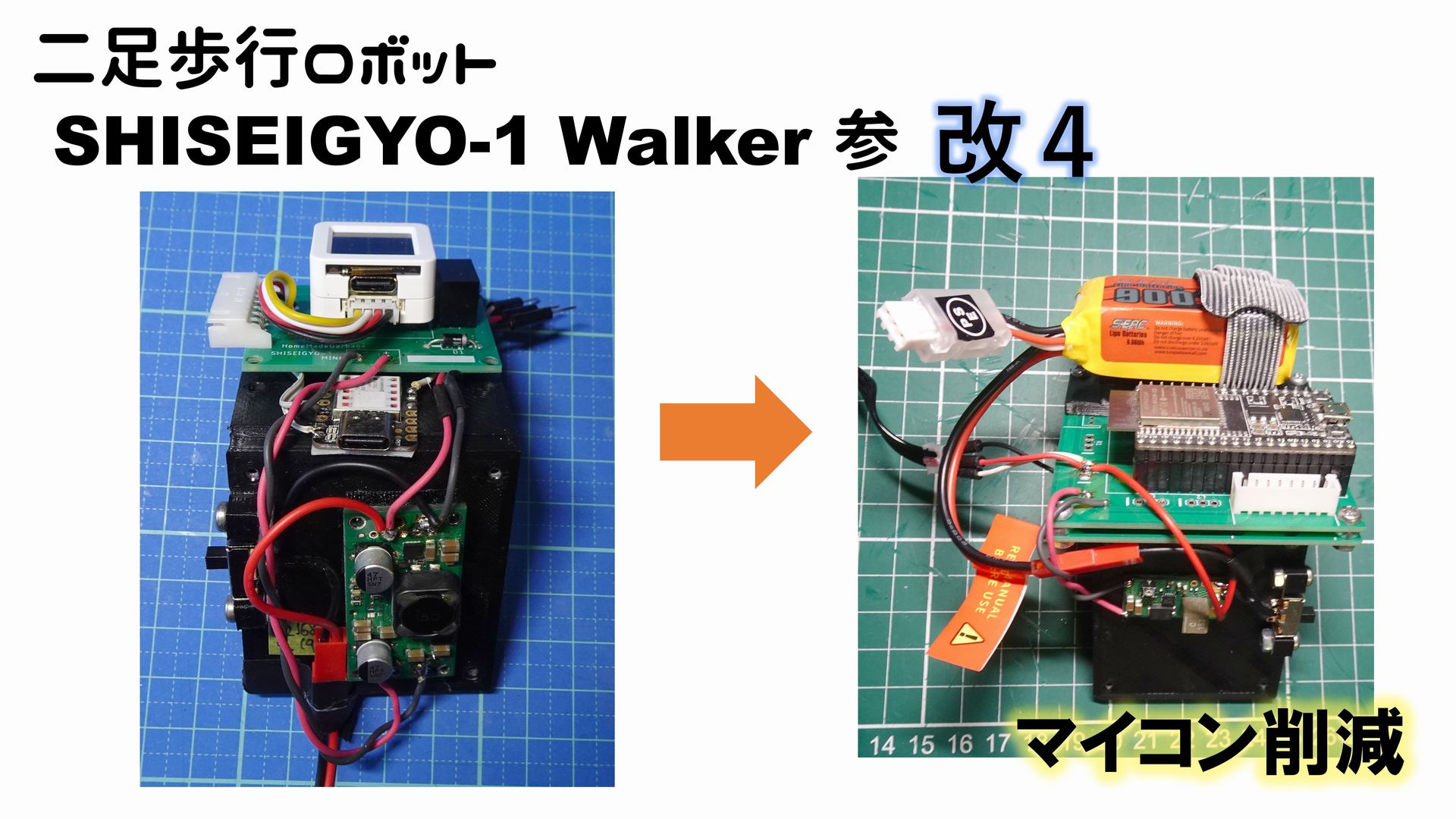
二足歩行ロボット SHISEIGYO-1 Walker 参 改 5
本記事にはアフィリエイト広告が含まれます。
前回はマイコンを削減してESP32単体で制御できるようにして、さらに24V DCDCモジュールの低価格化をはかりました。
ここでは足を改良して旋回動作できるようにしましたので報告します。
目次
旋回したい
以前、初代 SHISEIGYO-1 Walkerの足を改良してサイドステップ動作を検討しました。
しかし、よくよく考えてみると足元にロール軸を設けてサイドステップ動作ができるようになっても横やナナメに動けるだけで旋回はできないですよね。。
ヨ―角の検討
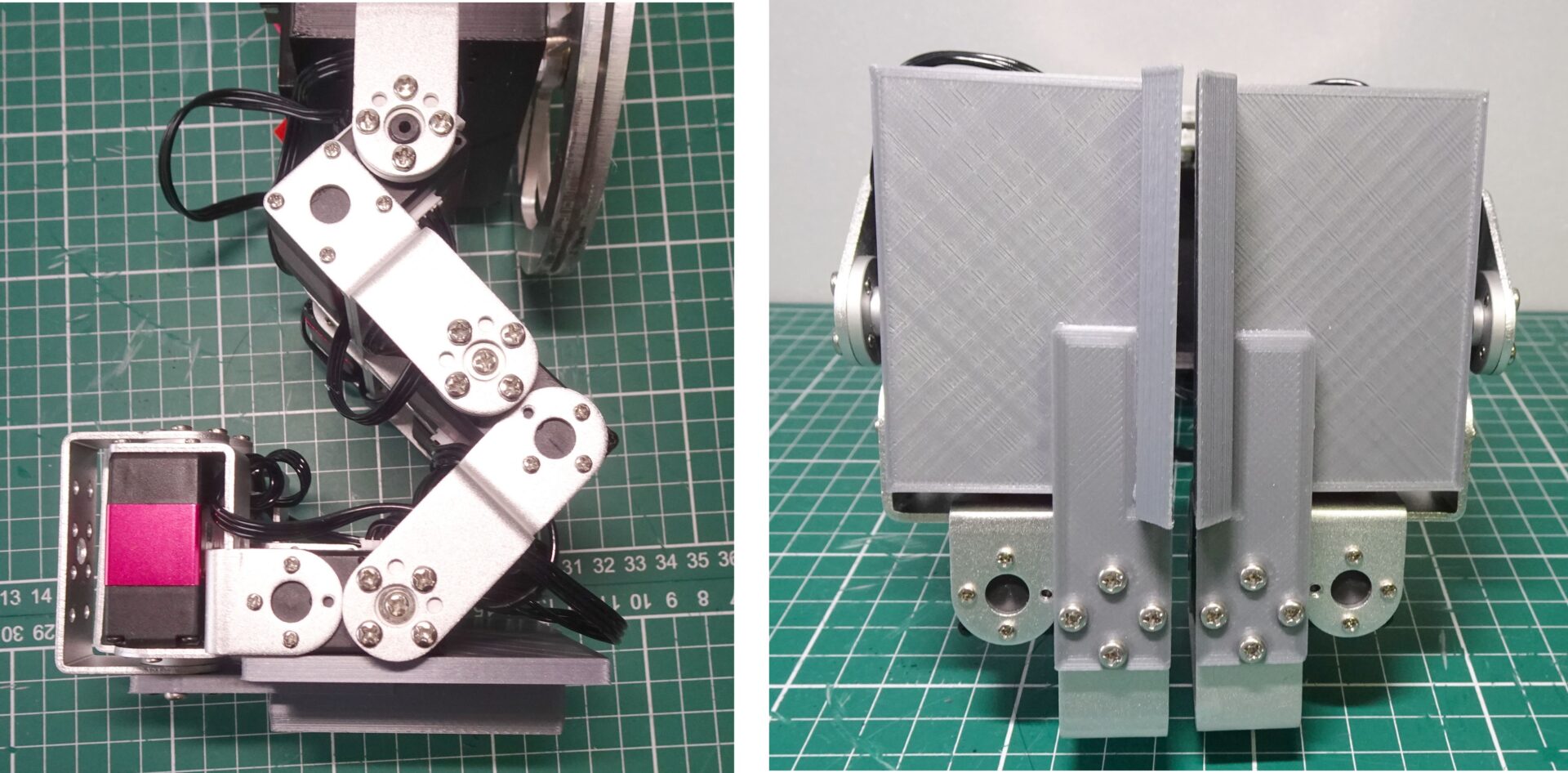
そこで SHISEIGYO-1 Walker 参 改に更に改良を加え かかとにサーボを追加してヨ―角回転できるようにしました。
まずは片足で動作確認
足首ヨ―角テスト
自分でその場で足踏みしながら旋回してみて
思いついた機構行けるかもしれんね#robot #robotics pic.twitter.com/Dvd4eCkT9J
— HomeMadeGarbage (@H0meMadeGarbage) March 11, 2023
なんか可能性ありそうということで両足に展開
旋回動作
旋回動作を確認
— HomeMadeGarbage (@H0meMadeGarbage) March 12, 2023
片足接地時に足首をひねって旋回させています。左右両方の足をひねっているのですが、バランスを保つのがツラそうです。。
片足のみ足首をひねるようにしました。左旋回の時は右足接地時に足首をひねります vice versa。
遅いですがなんとか旋回動作が実現できました。
おわりに
ここでは足首運動によるヨ―角旋回動作を確認しました。
フライホイールの回転軸から回転するように足首をひねり支点の角度がずれるので、外乱としては強烈なものがあります。
そのためバランスを保とうとするとゆっくり少しずつ旋回することを余儀なくされます。
しかし、実機で旋回動作の難しさを確認できたことは大きな収穫となりました。
結論としましては1軸では旋回動作は難しいかなという感想です。
こうなると2軸で検証したくなりますね。。(;゚д゚)ゴクリ…