SHISEIGYO-2 Walker の歩行を再検討2
本記事にはアフィリエイト広告が含まれます。
前回は2足歩行ロボット SHISEIGYO-2 Walker の足を逆運動学で位置指定して動かせるようにしました。
ここでは逆運動学での歩行について検証しました。
目次
歩行検証
逆運動学による足先座標の指定動作を両足に展開して歩行動作を確認します。
足踏み
まずは両足の高さのみを正弦波形で変化させて足踏み動作の確認をしました。
他方を逆相で動かせば足踏みとなります。
SHISEIGYO-2 Walker 足踏み
逆運動学で足先座標してできるようになったので
正弦波で上下
上半身のブレが小さく実にエレガント pic.twitter.com/PB0dzDgmNT— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2022
リニアにサーボ角度を変えていた時よりも柔らかな動作になりました。
逐次足の高さを指定できるようなったことによる恩恵ですね。
歩行
足踏みが確認できましたので、いよいよ歩行に挑戦します。
座標は以下のように前後方向をX軸、上下方向をY軸としました。
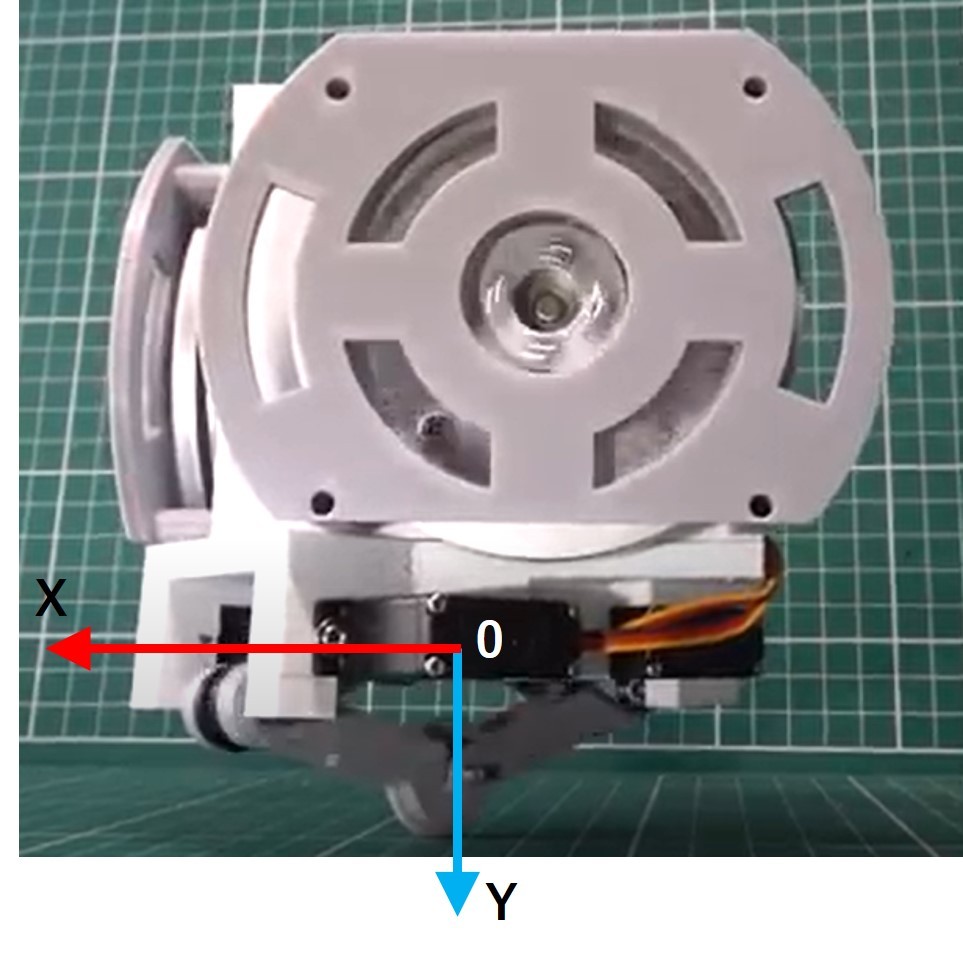
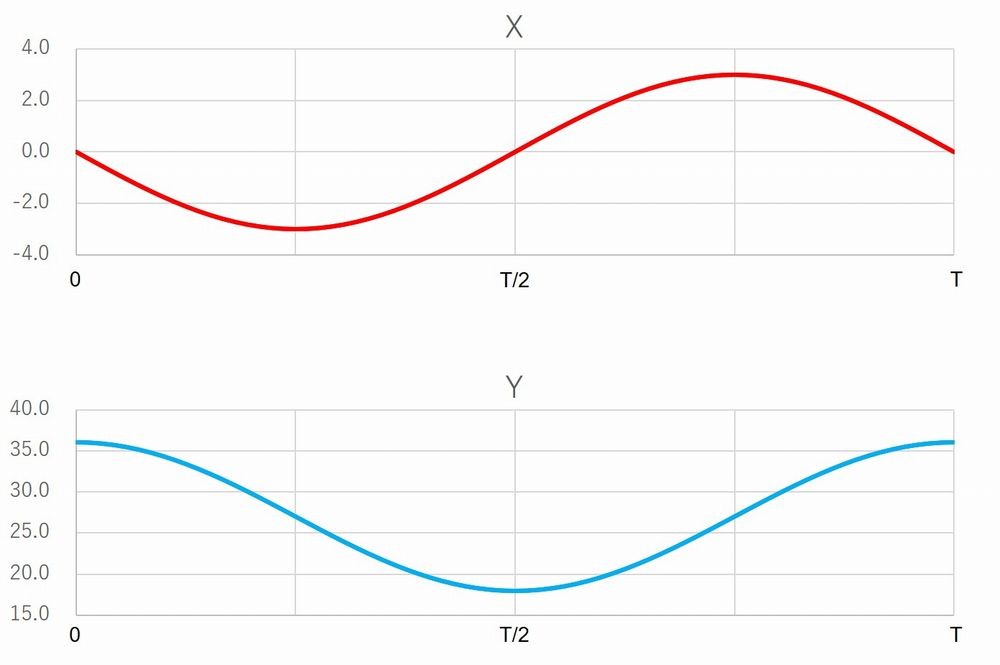
以下のようにX軸、Y軸を正弦波形で変化させて足の座標を指定して動かします。
他方の足はこれと逆相で動かします。
動作
ミニサーボだとトルク足りず異音出て
指定通りの歩行にならなかった pic.twitter.com/itw4l121HS— HomeMadeGarbage (@H0meMadeGarbage) January 17, 2022
使用したミニサーボ FT1117Mではトルクが足りないようで異音がでて、良い感じの歩行になりませんでした。。
足をこまかに前後することでサーボ単体にかかる負荷が増したためと考えられます。

サーボ交換
トルク向上のためサーボを以下に変更します(ちょっとオーバースペックでサイズがでかいのが難点ですが。。)。
足踏み
ミニサーボと同様に正弦波で足踏み動作確認。
もっと力強く足上げしたかったので
25kgサーボに変更 pic.twitter.com/EdcgSXpW3N— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2022
大変力強くいい感じ!
歩行
ミニサーボと同様に正弦波で歩行動作確認。
歩行
こちらも正弦波形で柔らかく足位置指定 pic.twitter.com/rNgWxhgYcc— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2022
こちらは問題なく元気に歩行できました。
以前のように線形的にサーボの角度を直接動かしていたより、柔らかく生物的になった気がします。
33日後に2足歩行ロボットを完成させたい俺
18日目#33日2足歩行ロボ pic.twitter.com/3E46kMlEcc— HomeMadeGarbage (@H0meMadeGarbage) December 9, 2021
おわりに
ここではSHISEIGYO-2 Walkerで逆運動学による歩行を確認しました。
次は前後方向のバランス耐性をリアクションホイールの調整含めて確認してみたいと思います。
それではまた