
SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
本記事にはアフィリエイト広告が含まれます。
先日 2軸の姿勢制御モジュール SHISEIGYO-2を用いて二足歩行ロボット(SHISEIGYO-2 Walker)を製作いたしました。
ここでは新たな2足歩行ロボットの実現を目指して検討を進めます。
目次
SHISEIGYO-1 Walker
SHISEIGYO-2 Walkerでは足の高さが4cm程度まででの倒立保持がやっとでした。
これ以上の足の高さにするにはホイールのトルクを大きくする必要がありそうですが
2つの大きなホイールとモータ重量を支える長い足の実現は難しそうです。
SHISEIGYO-2 Walker 歩行検討 pic.twitter.com/4LpzyFplJG
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2022
そこで1軸のリアクションホイールを用いて足の長い二足歩行ロボットを目指すことにしました。
足には以前検討したシリアルサーボ(KRS3301)による機構を応用したいと思います。
極力 急峻に動かないように
滑らかに制御 pic.twitter.com/PFhVhlXqu1— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2022
1軸リアクションホイールを用いた2足歩行ロボット SHISEIGYO-1 Walkerのイメージは以下のような感じ
私の目標
1/400 ビグザム https://t.co/7rF1wU1bDb
— HomeMadeGarbage (@H0meMadeGarbage) January 13, 2022
↑コラ―ジュですw
1軸 姿勢制御モジュールの検討
1軸 姿勢制御モジュール SHISEIGYO-1 を応用して、長い足を支えるための検討を実施します。
ブラシレスモータとコントロール基板の箱をつくって、三角形の足を両面テープで貼り付けて倒立高さの実験を行いました。
コントローラ基板はSHISEIGYO-2 Walkerのモノを1軸用に改修しました。
12cm径のフライホイールを使用しました。
ちょっと実験用に組んだけど
ホイールむき出しで危ない pic.twitter.com/yFMWyZpwkZ— HomeMadeGarbage (@H0meMadeGarbage) January 20, 2022
間に木の棒を挿入して高さを上げて実験。
目標の15cm以上達成
次につながる pic.twitter.com/MJLO93FZ2A— HomeMadeGarbage (@H0meMadeGarbage) January 20, 2022
15cm以上の高さでも倒立を確認することができました。
このくらいであればシリアルサーボによる足も導入できそうです。
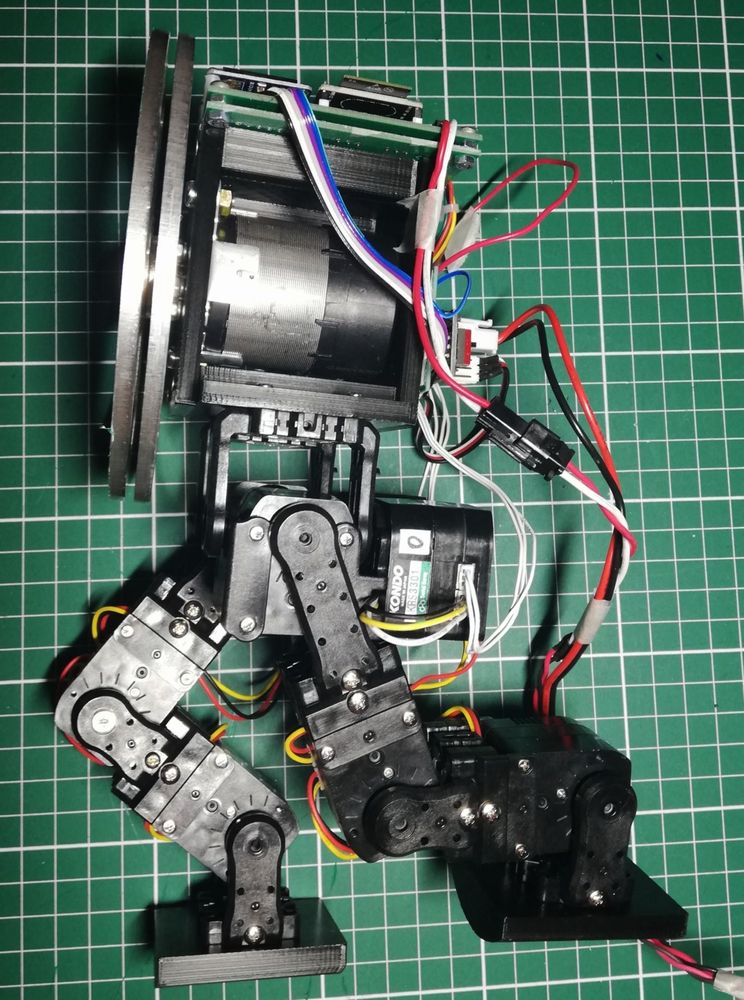
足の検討
以前製作したシリアルサーボによる足にリアクションホイール部を載せて歩かせてみました。
心配だった
サーボのトルクは何とかなりそうで
一安心 pic.twitter.com/LZB7CwtF99— HomeMadeGarbage (@H0meMadeGarbage) January 20, 2022
問題なく歩けました。大きなトルク不足はないようで安心しました。
軸の自由度を変えずに足高さを低くするために直交軸フレームの導入を検討しました。
大変良いものを買った
直交軸フレーム3300セット – スイッチサイエンス https://t.co/zEMj9wONHd pic.twitter.com/DwYxpnTOKH
— HomeMadeGarbage (@H0meMadeGarbage) January 21, 2022
直行軸フレームを足の付け根に導入しました。
歩行も問題なく、高さは20mmほど低くできました。
歩行も確認
良い股関節 pic.twitter.com/hbuVeB2m6F— HomeMadeGarbage (@H0meMadeGarbage) January 21, 2022
参考
- 直交軸フレーム組立て方法 (p. 13-15): https://www.kondokagaku.jp/data_download/KXR-PartsAssyManual_V_1_0.pdf
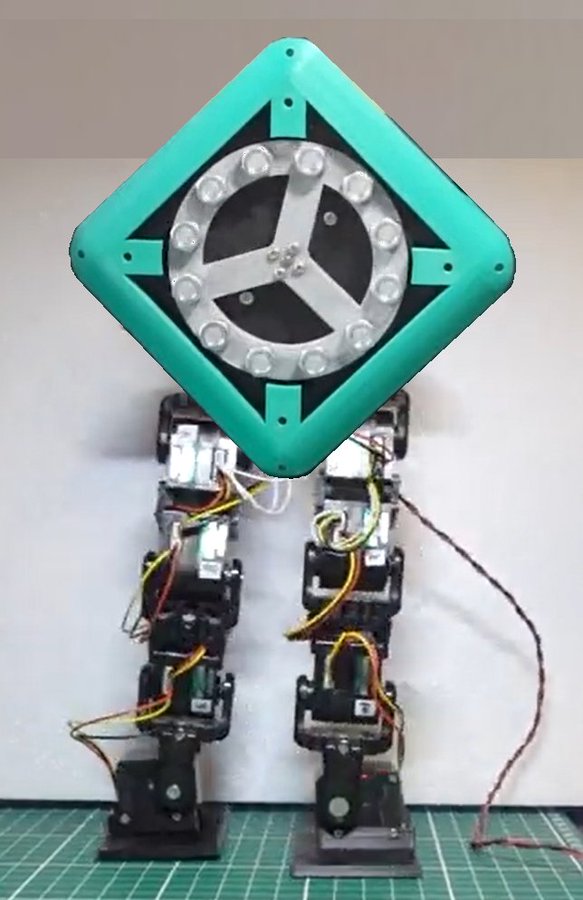
倒立検討
リアクションホイール部を載せての歩行が確認できましたので、ホイールによるバランス倒立動作の確認を実施します。
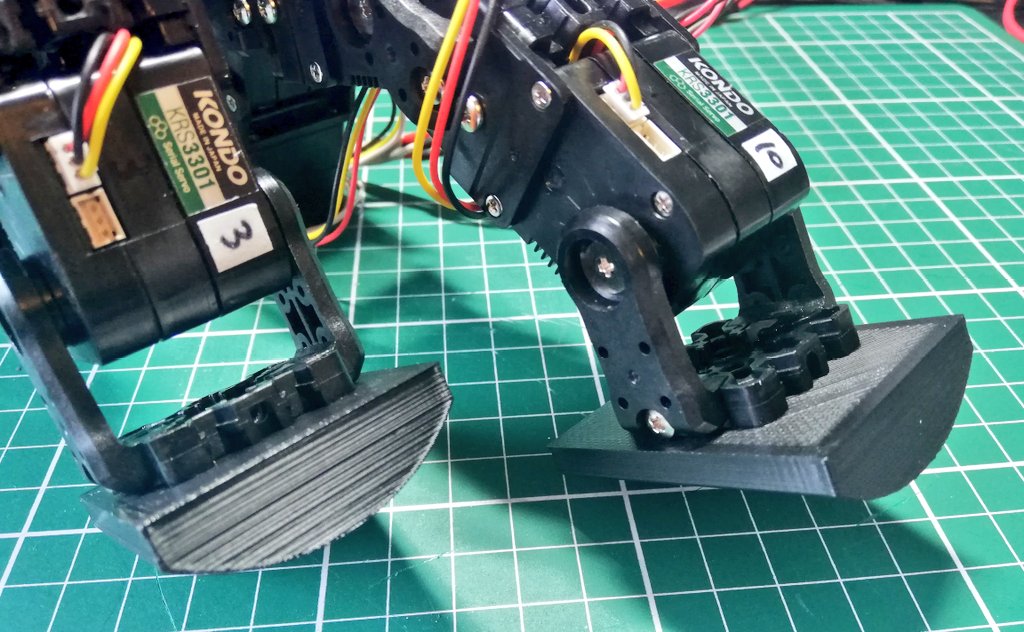
足先は以下のようにかまぼこ型にして、足首ロール用のサーボモータは除去しました。片足が5軸から4軸となります。
片足立ちの姿勢でサーボを固定して倒立動作を確認しました。
立った pic.twitter.com/bVTnWXnVPt
— HomeMadeGarbage (@H0meMadeGarbage) January 22, 2022
無事に倒立できました。
サーボ軸が若干きしむので少しふらつきますが踏ん張ってくれています。
より安定性を高めるためにフライホイールを2枚重ねにしました。
他方の足をゆっくり動かしてみました。
わかりにくいけど
左足少し開いて閉じさせてた。
歩行までの道のりは遠そう。。 pic.twitter.com/SM7fHjeKCH— HomeMadeGarbage (@H0meMadeGarbage) January 22, 2022
足を急に動かすと、バランスを崩すので現状で歩行はまだ難しく調整が必要です。
おわりに
ここでは1軸 姿勢制御モジュールを用いた2足歩行ロボット SHISEIGYO-1 Walker の検討を行いました。
とりあえず片足倒立は実現できましたので歩行に向けて検討を進めたいと思います。
次の記事

関連記事
 SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
 SHISEIGYO-1 Walkerを実現させたい俺4 ー歩行検討2ー
SHISEIGYO-1 Walkerを実現させたい俺4 ー歩行検討2ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
 SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー