
SHISEIGYO-1 Walker 参 を実現させたい俺2 ー倒立実現ー
本記事にはアフィリエイト広告が含まれます。
前回はシリアルサーボLX-244を用いて片足動作を確認しました。
精度も良くSHISEIGYO-1 Walker の実現に使えそうと判断しましたので、ここでは更に検証を進めます。
目次
両足構成
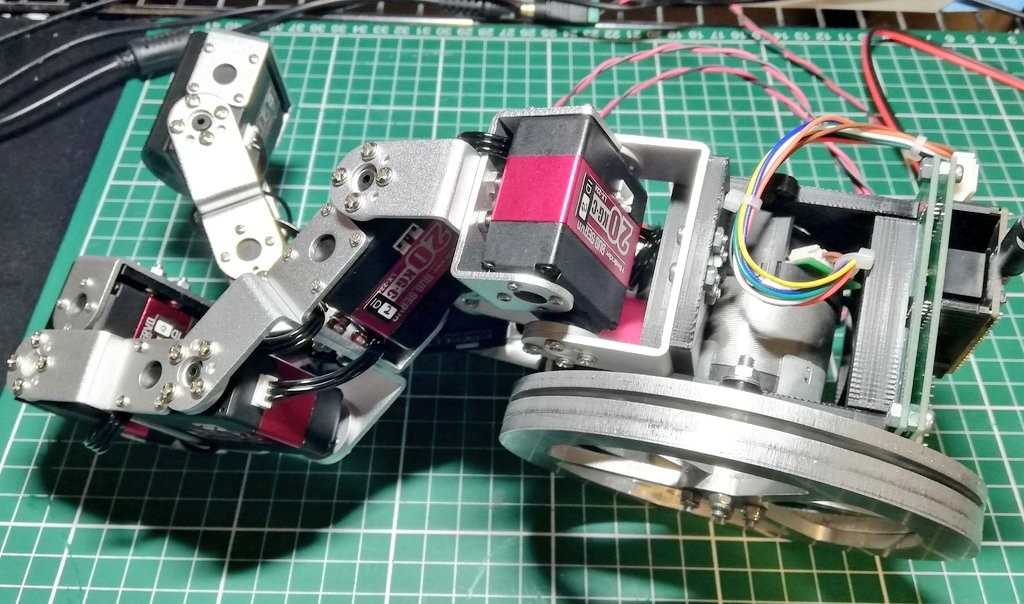
シリアルサーボLX-244を追加購入し、片足4つずつ計8個のサーボを用いて両足動作を確認しました。
前回同様に専用のコントローラを介してArduino UNOで制御しています。
力強く非常にスムーズでいい動きです。
リアクションホイールも搭載してみました。
こちらはESP32で直接 シリアルサーボLX-244を制御しています。
なかなか良い pic.twitter.com/n3RJ4rh2hk
— HomeMadeGarbage (@H0meMadeGarbage) June 23, 2022
サーボのトルクも十分で全く問題ないようです。
リアクションホイールによる倒立
足先をかまぼこ状にして、倒立動作を確認します。
足はかまぼこ状なのでホイール回転なしでは
自立できません pic.twitter.com/sdiBFIdFne— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2022
倒立動作を確認しました。しかし若干安定度に欠けます。
とりあえず立ったけど 心もとない
フライホイールの検討必要#ReactionWheel pic.twitter.com/dIhSoUU2tQ— HomeMadeGarbage (@H0meMadeGarbage) June 23, 2022
フライホイールを2枚から3枚に増やしてみました。
重心前後運動
倒立の安定度確認や足の構成の調整チェックを重心の前後移動動作で実施しました。
もろもろ調整しつつ動作確認。
前後重心移動調整2#Robotics #ReactionWheel pic.twitter.com/TH8wIluj2i
— HomeMadeGarbage (@H0meMadeGarbage) June 26, 2022
足の形状や取り付け位置を調整して安定して重心移動ができるようになりました。
おわりに
無事にリアクションホイールによる倒立で重心移動まで確認できました。
シリアルサーボLX-244の動作精度には全く問題がないと現状では考えております。
ここからは歩行に向けて検証進めたいと思います。
次の記事

関連記事
 SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
SHISEIGYO-1 Walker 参 を実現させたい俺1 ーサーボ味見ー
 SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
SHISEIGYO-1 Walker 参 を実現させたい俺3 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walkerを実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
SHISEIGYO-1 Walkerを実現させたい俺2 ー歩行検討1ー
 SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
SHISEIGYO-1 Walkerを実現させたい俺3 ーバランス動作検討ー
 SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
SHISEIGYO-1 Walkerを実現させたい俺5 ー歩行検討3ー
 SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
 SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー