
MuJoCo
PWMマイクロサーボで2足歩行ロボット
前回はPWMマイクロサーボ PTK7465のSim.モデルをこしらえて、2足歩行ロボの歩行動作を検証しました。 https://homemadegarbage.com/servomodel01/ ロボのSim.モデルをもとにAIエージェント Codexで最適動作を探索して実機で検証しました。 ...
電子工作 2026.6.30 お父ちゃん ![]()
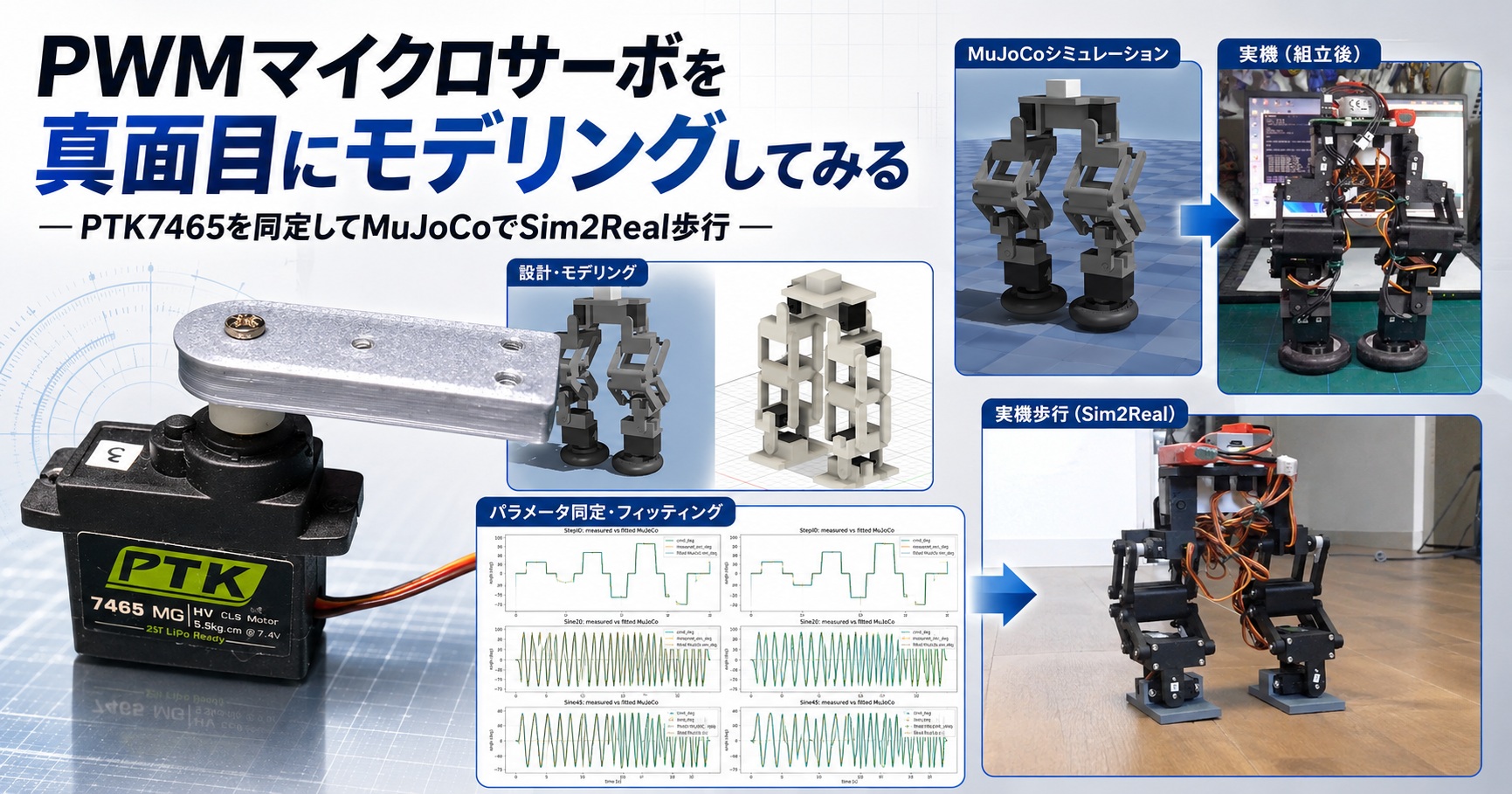
PWMマイクロサーボを真面目にモデリングしてみる — PTK7465を同定してMuJoCoでSim2Real歩行 —
最近はAIエージェント Codexを使って方針や報酬設計丸投げの強化学習にハマっています。 PWMマイクロサーボを用いたロボでも結果が出ており大変に満足しております。 https://homemadegarbage.com/rl13// https://homemadegarbage.com/...
電子工作 2026.6.28 お父ちゃん ![]()
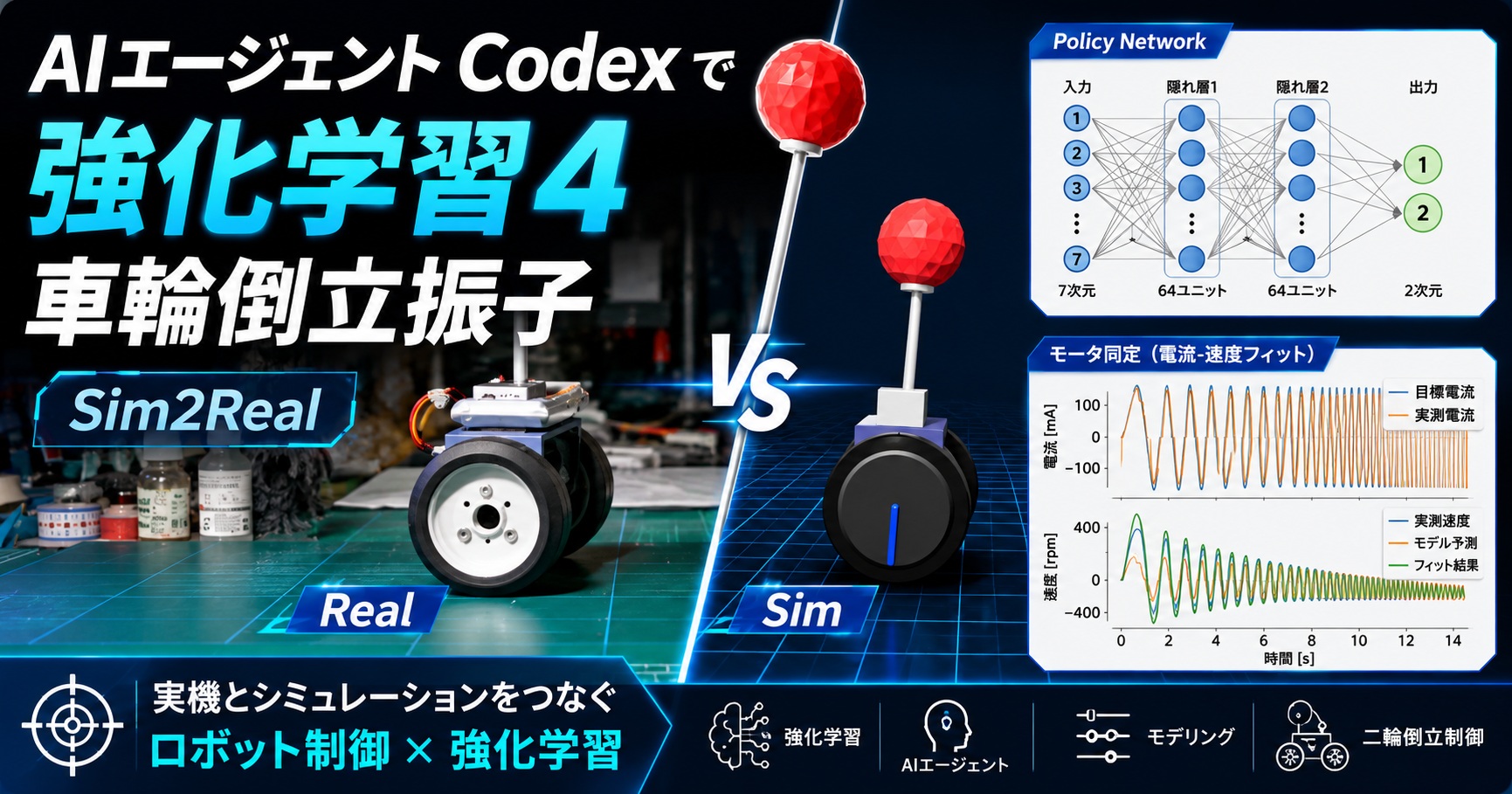
AIエージェント Codex で 強化学習4 車輪倒立振子
最近はCodexを当たり前のように使って生活しており、 わざわざ "AIエージェント Codex を使ってます" なんてことを言うのも今回が最後になるのではないでしょうか? ここでは以前挑戦したゲームコントローラで操作する倒立振子の強化学習に再挑戦します。 ROBSTRIDE 05 倒立...
電子工作 2026.6.23 お父ちゃん ![]()

AIエージェント Codex で 強化学習3 起き上がり4脚ロボット
前回はAIエージェント Codex で簡素な2軸の起き上がりロボの強化学習を実施いたしました。 https://homemadegarbage.com/rl13// 簡単なPWMサーボでも強化学習によって見事な起き上がりロボになりました。 フィジカルAIって、心を鬼にしないといけない...
電子工作 2026.6.15 お父ちゃん ![]()

AIエージェント Codex で 強化学習2 起き上がりロボ
前回はAIエージェント Codexに強化学習を実施してもらい2足歩行ロボットのバランス動作を実現しました。 https://homemadegarbage.com/rl12// Codex先生が学習の環境構築、報酬設計、学習フローすべて考えてくださり、長年憧れていた動作ができました。 C...
電子工作 2026.6.11 お父ちゃん ![]()

AIエージェント Codex で 強化学習2足歩行ロボット HM-01
最近はAIエージェント Codexをさわって色々楽しませていただいております。 今回はCodexで強化学習を楽しみましたので報告いたします。 テーマとして2足歩行ロボットのバランス動作を選択しました。 これまた生活変わるレベルで驚かされました。 2足歩行ロボットの強化学習...
電子工作 2026.6.9 お父ちゃん ![]()

AIエージェント Codex で ドローン2MuJoCo で シミュレーション
前回はAIエージェント Codex を活用してドローンの学習を開始しました。 https://homemadegarbage.com/drone04/ Codex先生のおかげで姿勢制御やゲームコントローラによる位置制御を数日で実現できてしまいました。 Codex先生にドローン制御コー...
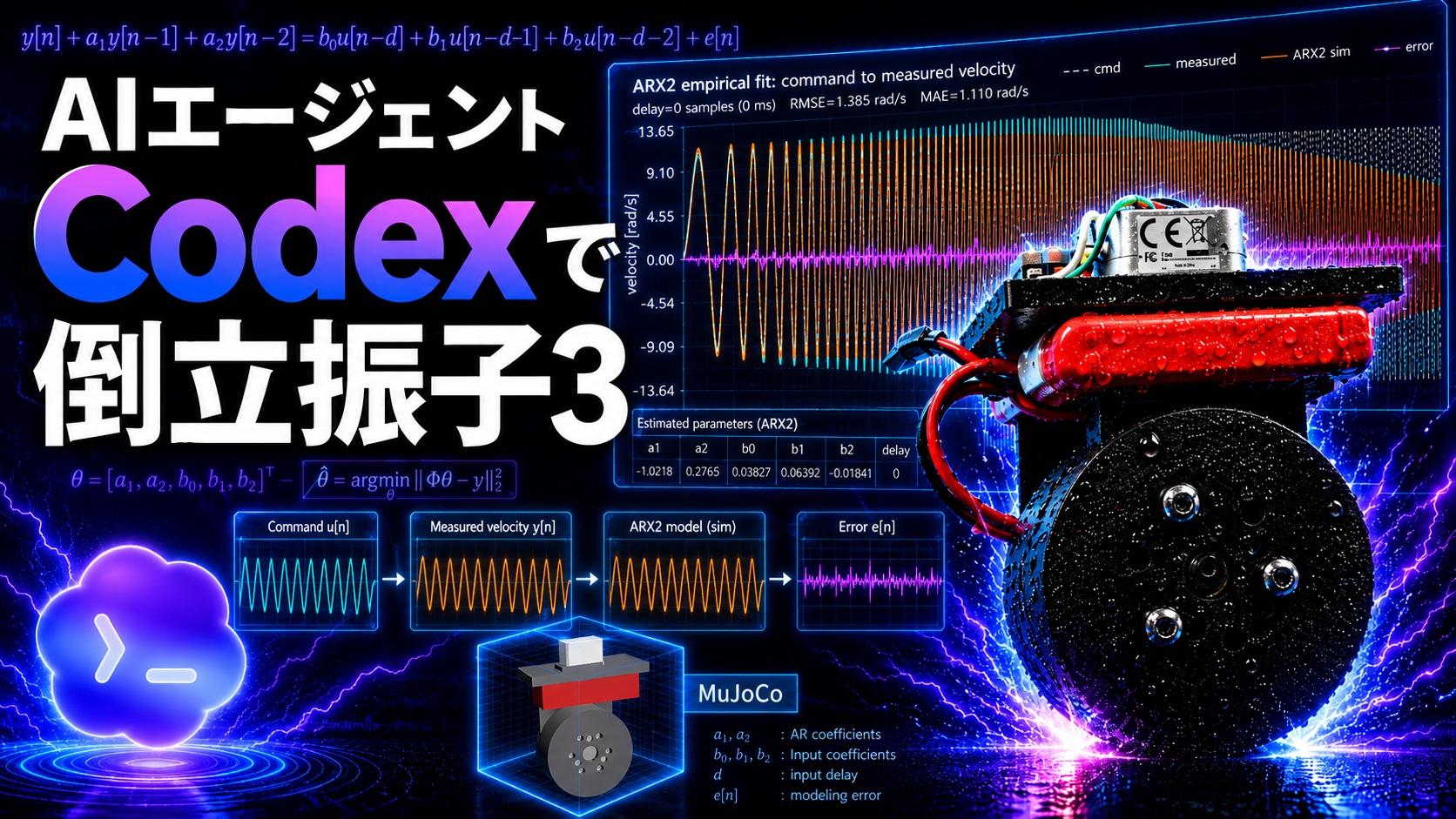
AIエージェント Codex で 倒立振子3 ーモータモデルの同定手法を確立ー
前回は Codex に倒立振子の制御そのものを考えてもらい、見事実機でも素晴らしい倒立制御が実現されました。 https://homemadegarbage.com/codex02 AIエージェントによるバイブコーディングで倒立振子の動作実現は無理であると考えていたため、非常に驚きました。 C...

2足歩行ロボット HM-01 の強化学習3
以前実施した自作2足歩行ロボ HM-01の強化学習について改めて考えてみました。 https://homemadegarbage.com/rl09/ ロボットの強化学習による動作生成は今や当たり前のように実用され、フレームワークも進化し整ってきているように感じます。 GPU...
電子工作 2026.1.30 お父ちゃん ![]()
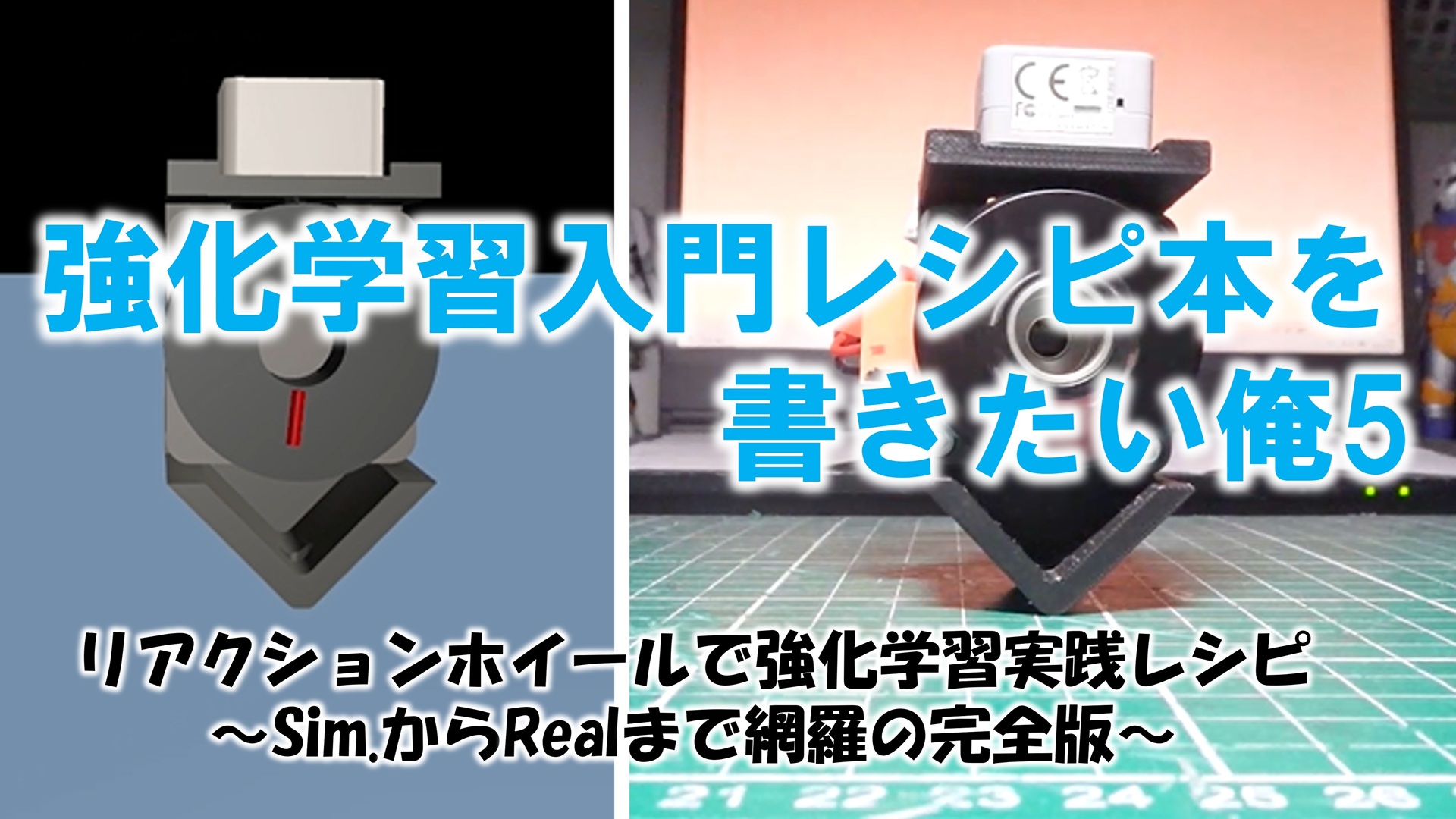
強化学習入門レシピ本を書きたい俺5 祝出版!! 涙の最終回
HomeMadeGarbage Advent Calendar 2025 |11日目 前回はレシピ用のリアクションホイール倒立振子機体で強化学習Sim2Realまで確認しました。 https://homemadegarbage.com/rl-recipe04/ 本連載を通して容易に組める実機で...
Advent Calendar / 電子工作 2025.12.11 お父ちゃん ![]()
強化学習入門レシピ本を書きたい俺4
HomeMadeGarbage Advent Calendar 2025 |9日目 前回はレシピ本用の倒立振子実機の開発を行い、さらにMuJoCoモデルも完成させました。 https://homemadegarbage.com/rl-recipe03// ここではついに強化学習を実施します。 ...
Advent Calendar / 電子工作 2025.12.9 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺3
HomeMadeGarbage Advent Calendar 2025 |6日目 前回は強化学習入門レシピ本の制作をめざして、ブラシレスモータによるリアクションホイール倒立振子の強化学習Sim2Real実施までおさらいしました。 https://homemadegarbage.com/rl-r...
Advent Calendar / 電子工作 2025.12.6 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺2
HomeMadeGarbage Advent Calendar 2025 |4日目 前回は強化学習入門レシピ本の制作をめざして、ブラシレスモータによるリアクションホイール倒立振子の強化学習実施までのおさらいをしました。 https://homemadegarbage.com/rl-recipe0...
Advent Calendar / 電子工作 2025.12.4 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺1
HomeMadeGarbage Advent Calendar 2025 |1日目 先日つぶやいたコチラのポストへの反応が凄くよかったのです。 強化学習について興味を持っている人が多くいるのだろうと感じました。 ←誉れ高き古典制御による職人技 →トレンドに乗じただけの軽佻浮薄な強化学習 ...
Advent Calendar / 電子工作 2025.12.1 お父ちゃん ![]()

2足歩行ロボット HM-02 の強化学習
前回は2足歩行ロボット HM-01 の足踏みバランス動作を目指して強化学習を実施しました。 https://homemadegarbage.com/rl09/ 足踏み動作をリファレンスモーションとして用意して外乱を与えてバランス学習しました。 それはそれは見事なSim2Realで強化学習の有用...
電子工作 2025.10.25 お父ちゃん ![]()