3軸姿勢制御モジュール SHISEIGYO-3 Roller の製法
本記事にはアフィリエイト広告が含まれます。
目次
はじめに
SHISEIGYO-3 Roller はRoller485 Lite ユニットを用いた3軸姿勢制御モジュールです。
コントローラとしてIMU内蔵のATOM Matrixを使用し点倒立を実現します。
マイコン内蔵のRoller485 Lite ユニットを用いることで構成が非常にシンプルになり姿勢制御モジュールの構築が容易となります。


ダウンロードファイル
筐体3DmodelとArduinoコードを以下よりダウンロードできます。zipファイルがダウンロードされます。
SHISEIGYO-3 Roller用DLファイル
部品
ここで使用した部品は以下のとおりです。
購入先はあくまで参考です。
- ATOM Matrix
スイッチサイエンス:https://www.switch-science.com/products/6260
- Roller485 Lite ユニット:3個
スイッチサイエンス:https://www.switch-science.com/products/9925
- 4ピンコネクタケーブル
マルツ:https://www.marutsu.co.jp/pc/i/829426/
- 2セル 7.4V LiPoバッテリ
Amazon:https://amzn.to/4dRHNNX
-
LiPoバッテリ用配線コネクタ
Amazon:https://amzn.to/3QgJw6u
使用したネジは以下のとおりです。
- M2×4mmネジ:1本 (ATOMと台固定用)
- タッピングなべネジ 2×10mm:3本 (ATOM台と筐体固定用)
- M3×5mmネジとナット:72セット (フライホイール重り用)
- M3×6mmネジ:12本 (ホイールとモータ固定用)
3Dモデル
ダウンロードファイルに同梱されております。
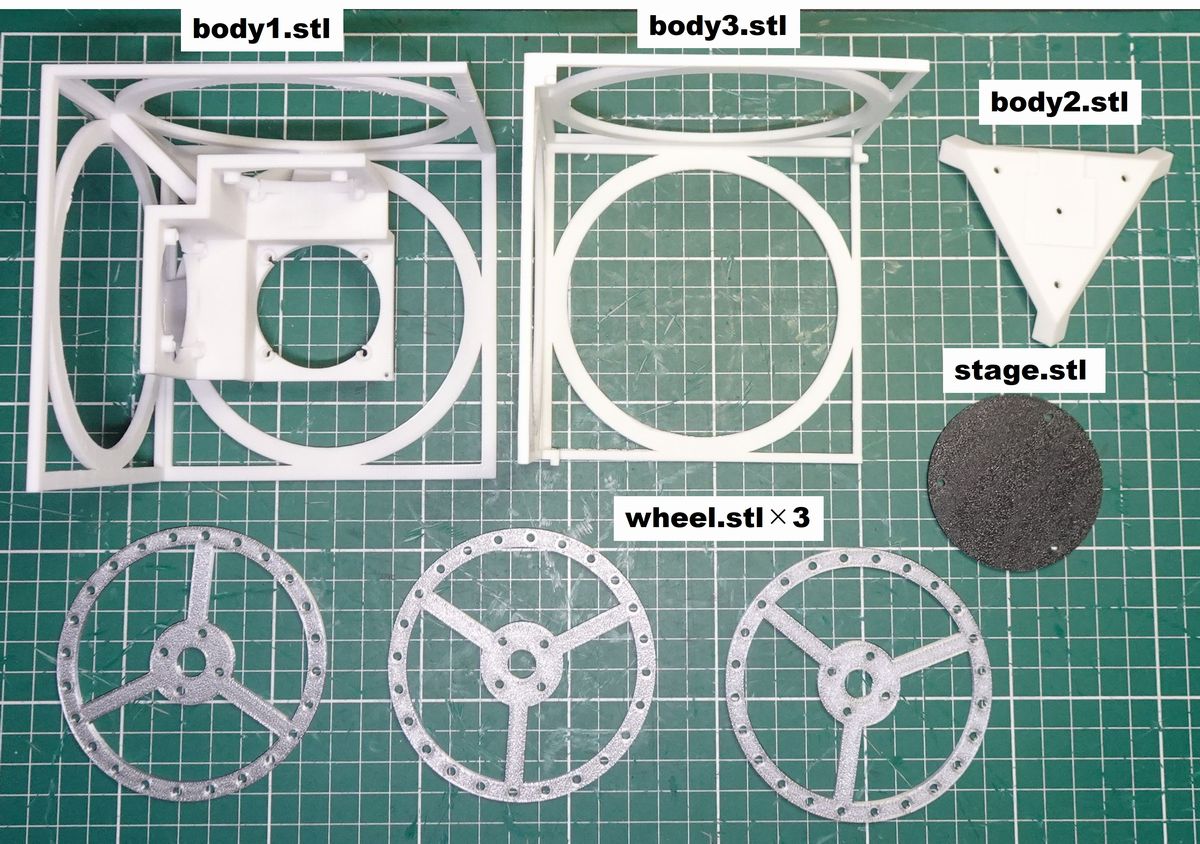
ここではPLAフィラメントで出力しました。強度が求められるwheel.stlは充填密度100%で印刷し、残りのモデルは25%としました。
製作
SHISEIGYO-3 Roller を組み立てます。非常に簡単です。
まずは3Dプリントした筐体のサポートを外して いざ!
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
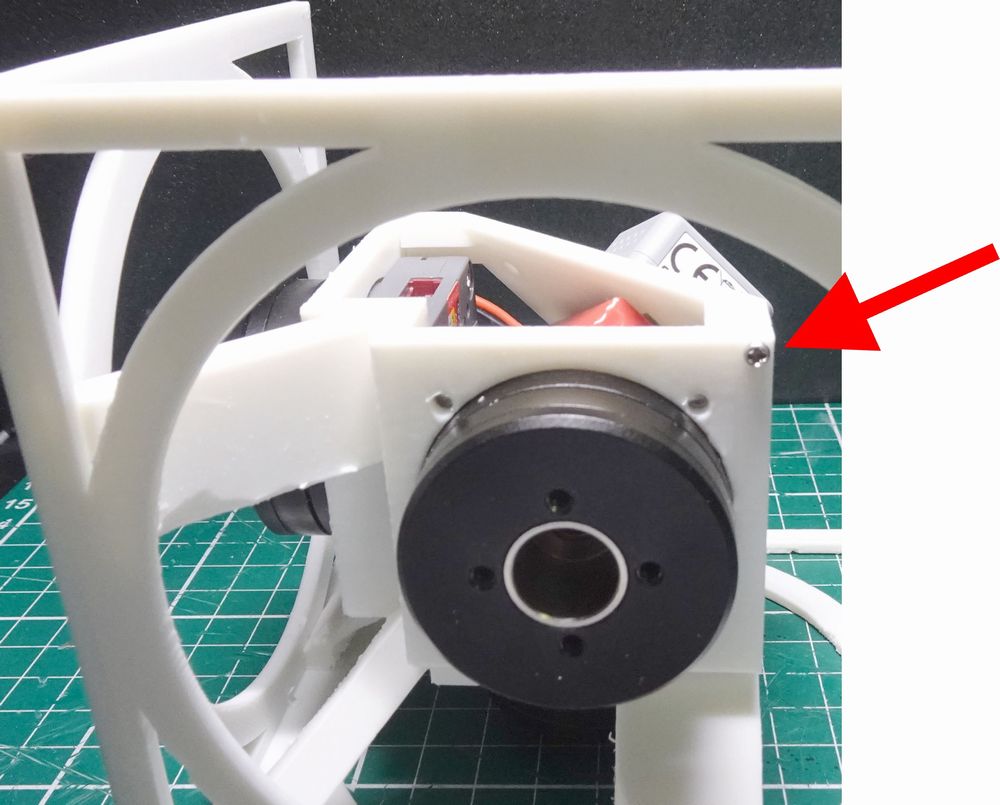
モータ実装
筐体 body1.stl のモータ固定M3ネジ穴をタップでねじ切り(計12か所)。
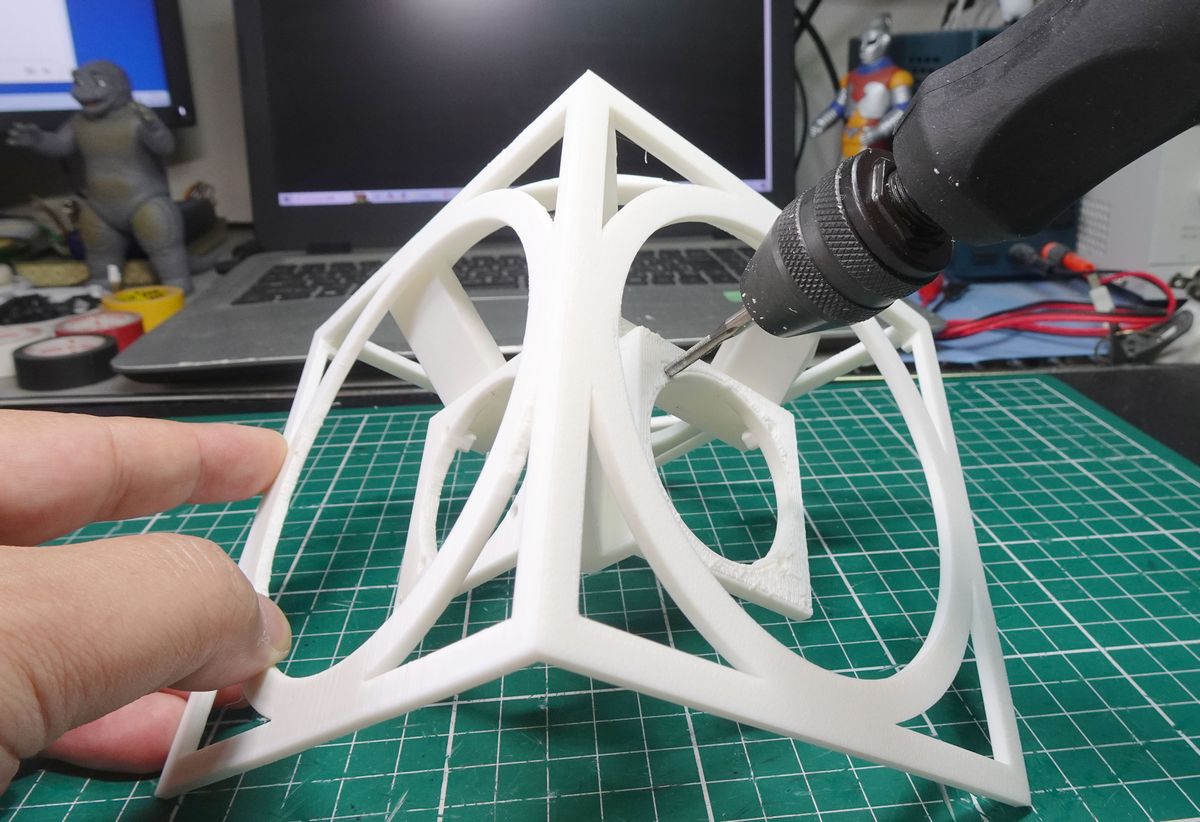
筐体にRoller485 Lite ユニットをはめ込んで同梱の6角穴M3 12mmネジで固定します。
ロード pic.twitter.com/gqdwkjzvp5
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
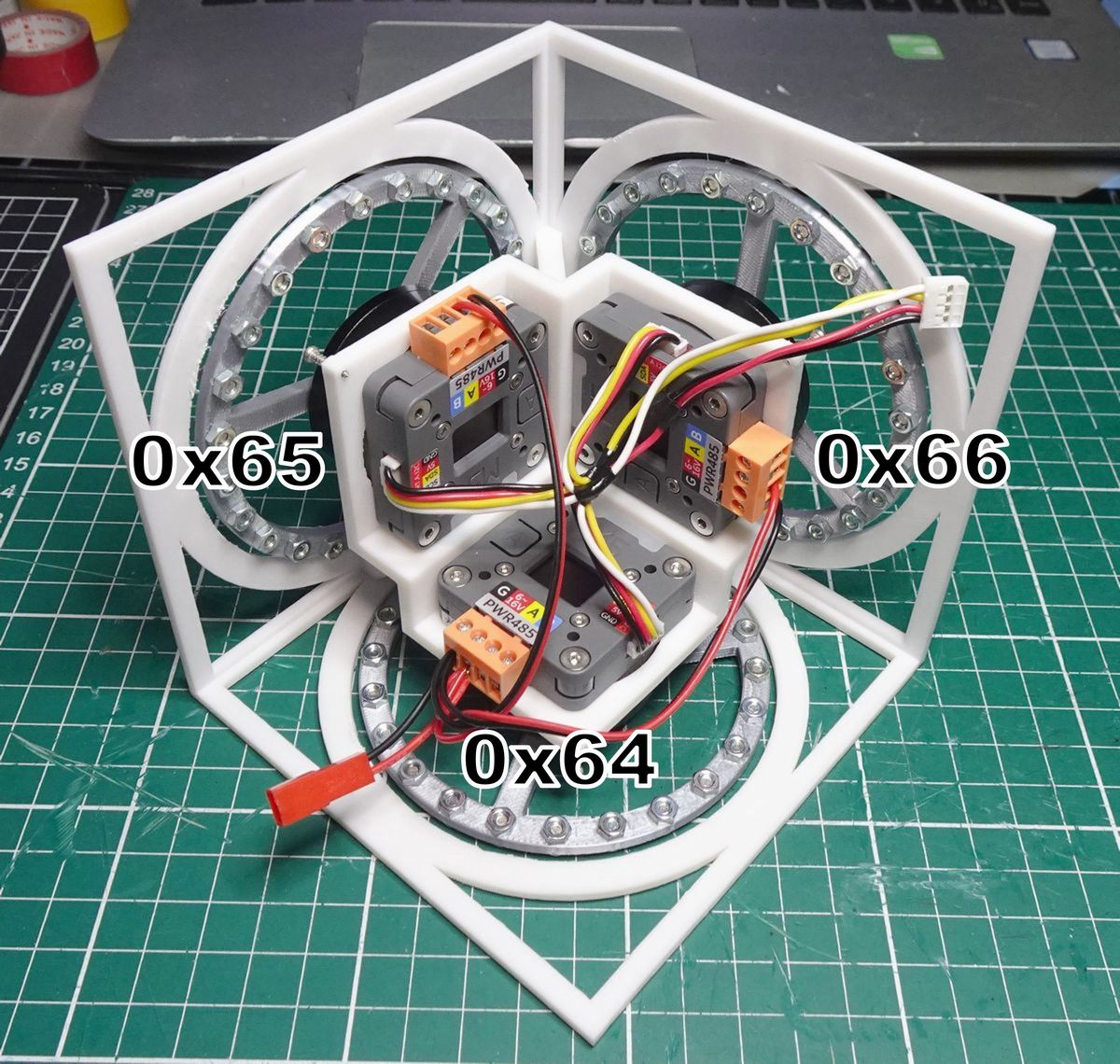
Roller485はI2C通信モードでIDは以下のように、前方のモータを0x64、左右をそれぞれ0x65、0x66としました。
Roller485 Lite ユニット単体の使用法は以下を参照ください。

配線
モータ電源と4ピンコネクタラインを接続します。
モータ電源はRS485用オレンジコネクタの電源部にLiPoバッテリ用配線コネクタをつなげて3個のモータが並列につながるよう結線しました。
I2C通信用4ピンコネクタラインはATOM Matrixと3つのモータがつながるようにはんだ付け加工しました。
4ピンコネクタ用のハブユニットを使用すればハンダ加工は必要なく楽です。
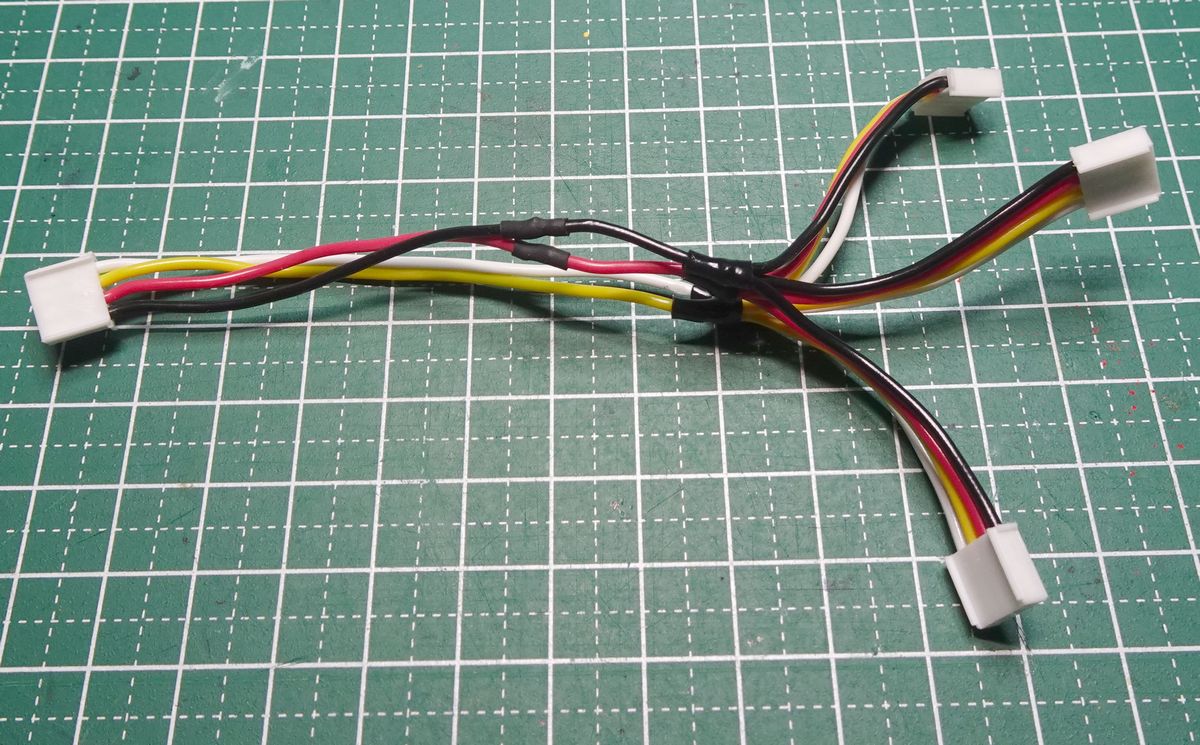
結線も容易であっという間に電源・通信システム完成。
誉れ高き 電源システム及び通信網の構築 pic.twitter.com/mxQfGZlDPR
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
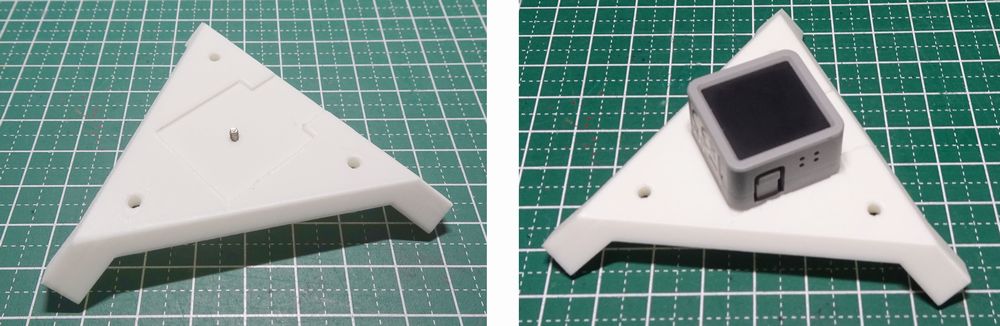
マイコン、バッテリ実装
body2.stlにATOM Matrix をM2×4mmネジで固定。
2セルLiPoバッテリを底面に両面テープで固定。
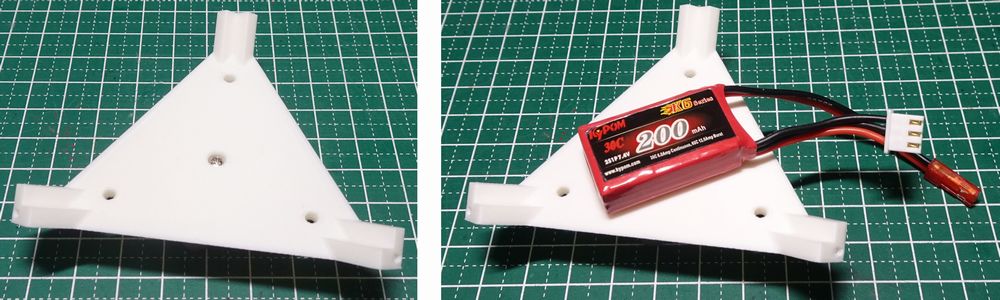
コチラを筐体 body1.stl にタッピングなべネジ 2×10mmで固定します (3か所)。
ファントムメナス pic.twitter.com/uvc0Esdo4u
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
フライホイール実装
ホイールフレーム (wheel.stl) の穴に重りとして M3×5mmネジとナットを取り付けます。
ここではホイール1個の総重量は約26gになりました。ネジ長やナットの数を変えてホイール重量の調整も可能です。
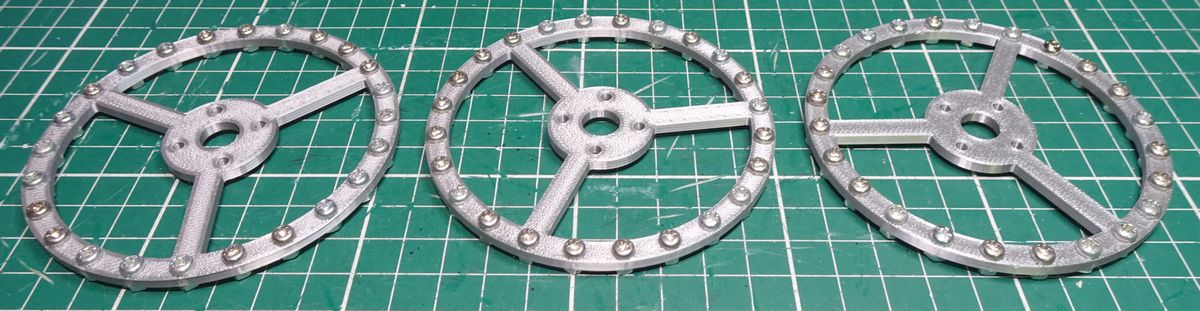
ホイールをモータにM3×6mmネジで固定します。
フライホイール3つ pic.twitter.com/QokVJrieYx
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
Arduinoコード
倒立動作用のコードです。ダウンロードファイルに同梱されております。
ATOMライブラリとRoller485のI2Cライブラリの共存がうまく出来なかったのでM5StickCのMPU6886ライブラリをATOM用にカスタマイズして使用しています。
使用ライブラリ
ここでは以下のバージョンを使用しています。各自の環境に合わせて適宜カスタマイズください。
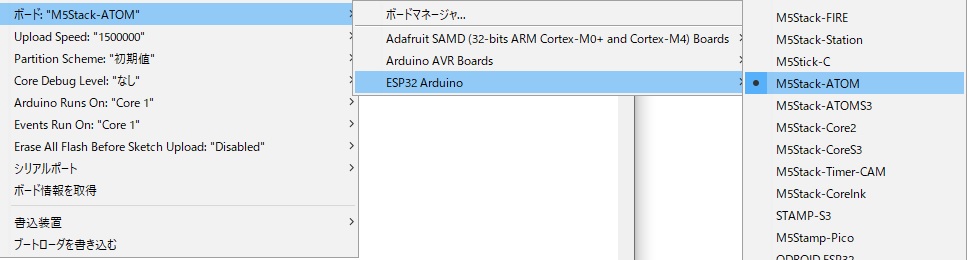
・Arduino IDEバージョン:1.8.19
・ESP32ボードマネージャ:2.0.17
・FastLED :3.4.0
・Kalman Filter Library:1.0.2
・Roller485
書き込みの設定は以下の通りです。
コード
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 |
#include "MPU6886.h" #include <Kalman.h> #include "FastLED.h" #include <WiFi.h> #include <WebServer.h> #include <Preferences.h> #include "unit_rolleri2c.hpp" UnitRollerI2C RollerI2C0, RollerI2C1, RollerI2C2; // Create a UNIT_ROLLERI2C object #define led_pin 27 #define NUM_LEDS 25 CRGB leds[NUM_LEDS]; MPU6886 IMU; WebServer server(80); const char ssid[] = "S-3 Roller"; // SSID const char pass[] = "password"; // password const IPAddress ip(192, 168, 122, 133); // IPアドレス const IPAddress subnet(255, 255, 255, 0); // サブネットマスク unsigned long oldTime = 0, loopTime, nowTime; float dt; float Kp = 60; float Kd = 65; float Kw = 1.2; float IDRS = 0.1; int delayTime = 5; float offsetX = 0.0, offsetY = 0.0; int GetUP = 0; float MX = 0.0, MY = 0.0, M0 = 0.0, M1 = 0.0, M2 = 0.0; float AjX = 0.0, AjY = 0.0; float velX = 0.0, velY = 0.0; float accX = 0, accY = 0, accZ = 0; float gyroX = 0, gyroY = 0, gyroZ = 0; float theta_X = 0.0, theta_Y = 0.0; float theta_Xdot = 0.0, theta_Ydot = 0.0, theta_Zdot = 0.0; Kalman kalmanX, kalmanY; float kalAngleX, kalAngleY, kalAngleDotX, kalAngleDotY; Preferences preferences; //加速度センサから傾きデータ取得 [deg] void get_theta() { IMU.getAccelData(&accX,&accY,&accZ); //傾斜角導出 単位はdeg theta_X = atan2(accY , -accZ) * 180.0/PI + offsetX; theta_Y = -atan2(-accX , -accZ) * 180.0/PI + offsetY; } //Y軸 角速度取得 void get_gyro_data() { IMU.getGyroData(&gyroX,&gyroY,&gyroZ); theta_Xdot = -gyroX; theta_Ydot = gyroY; } //ブラウザ表示 void handleRoot() { String temp = "<!DOCTYPE html> \n<html lang=\"ja\">"; temp += "<head>"; temp += "<meta charset=\"utf-8\">"; temp += "<title>S-3 Roller</title>"; temp += "<meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"; temp += "<style>"; temp += ".container{"; temp += " max-width: 500px;"; temp += " margin: auto;"; temp += " text-align: center;"; temp += " font-size: 1.2rem;"; temp += "}"; temp += "span,.pm{"; temp += " display: inline-block;"; temp += " border: 1px solid #ccc;"; temp += " width: 50px;"; temp += " height: 30px;"; temp += " vertical-align: middle;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "span{"; temp += " width: 120px;"; temp += "}"; temp += "button{"; temp += " width: 100px;"; temp += " height: 40px;"; temp += " font-weight: bold;"; temp += " margin-bottom: 20px;"; temp += "}"; temp += "</style>"; temp += "</head>"; temp += "<body>"; temp += "<div class=\"container\">"; temp += "<h3>S-3 Roller</h3>"; //offsetX temp += "offsetX<br>"; temp += "<a class=\"pm\" href=\"/offsetXm\">-</a>"; temp += "<span>" + String(offsetX) + "</span>"; temp += "<a class=\"pm\" href=\"/offsetXp\">+</a><br>"; //offsetY temp += "offsetY<br>"; temp += "<a class=\"pm\" href=\"/offsetYm\">-</a>"; temp += "<span>" + String(offsetY) + "</span>"; temp += "<a class=\"pm\" href=\"/offsetYp\">+</a><br>"; //Kp temp += "Kp<br>"; temp += "<a class=\"pm\" href=\"/KpM\">-</a>"; temp += "<span>" + String(Kp) + "</span>"; temp += "<a class=\"pm\" href=\"/KpP\">+</a><br>"; //Kd temp += "Kd<br>"; temp += "<a class=\"pm\" href=\"/KdM\">-</a>"; temp += "<span>" + String(Kd) + "</span>"; temp += "<a class=\"pm\" href=\"/KdP\">+</a><br>"; //Kw temp += "Kw<br>"; temp += "<a class=\"pm\" href=\"/KwM\">-</a>"; temp += "<span>" + String(Kw) + "</span>"; temp += "<a class=\"pm\" href=\"/KwP\">+</a><br>"; //IDRS temp += "IDRS<br>"; temp += "<a class=\"pm\" href=\"/IDRSm\">-</a>"; temp += "<span>" + String(IDRS) + "</span>"; temp += "<a class=\"pm\" href=\"/IDRSp\">+</a><br>"; //delayTime temp += "delayTime<br>"; temp += "<a class=\"pm\" href=\"/delayTimeM\">-</a>"; temp += "<span>" + String(delayTime) + "</span>"; temp += "<a class=\"pm\" href=\"/delayTimeP\">+</a><br>"; temp += "</div>"; temp += "</body>"; server.send(200, "text/HTML", temp); } void offsetXm() { if (offsetX >= -10) { offsetX -= 0.1; preferences.putFloat("offsetX", offsetX); } handleRoot(); } void offsetXp() { if (offsetX <= 10) { offsetX += 0.1; preferences.putFloat("offsetX", offsetX); } handleRoot(); } void offsetYm() { if (offsetY >= -10) { offsetY -= 0.1; preferences.putFloat("offsetY", offsetY); } handleRoot(); } void offsetYp() { if (offsetY <= 10) { offsetY += 0.1; preferences.putFloat("offsetY", offsetY); } handleRoot(); } void KpM() { if (Kp >= 0.1) { Kp -= 1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KpP() { if (Kp <= 300) { Kp += 1; preferences.putFloat("Kp", Kp); } handleRoot(); } void KdM() { if (Kd >= 0.1) { Kd -= 1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KdP() { if (Kd <= 300) { Kd += 1; preferences.putFloat("Kd", Kd); } handleRoot(); } void KwM() { if (Kw >= 0) { Kw -= 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void KwP() { if (Kw <= 300) { Kw += 0.1; preferences.putFloat("Kw", Kw); } handleRoot(); } void IDRSm() { if (IDRS >= 0.0) { IDRS -= 0.01; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void IDRSp() { if (IDRS <= 10) { IDRS += 0.01; preferences.putFloat("IDRS", IDRS); } handleRoot(); } void delayTimeM() { if (delayTime > 0) { delayTime -= 1; preferences.putInt("delayTime", delayTime); } handleRoot(); } void delayTimeP() { if (delayTime <= 30) { delayTime += 1; preferences.putInt("delayTime", delayTime); } handleRoot(); } //Core0 void displayIMU(void *pvParameters) { FastLED.addLeds<WS2812B, led_pin, GRB>(leds, NUM_LEDS); FastLED.setBrightness(20); IMU.Init(); //フルスケールレンジ IMU.SetAccelFsr(IMU.AFS_2G); IMU.SetGyroFsr(IMU.GFS_250DPS); get_theta(); kalmanX.setAngle(theta_X); kalmanY.setAngle(theta_Y); delay(100); WiFi.softAP(ssid, pass); // SSIDとパスの設定 delay(100); // 追記:このdelayを入れないと失敗する場合がある WiFi.softAPConfig(ip, ip, subnet); // IPアドレス、ゲートウェイ、サブネットマスクの設定 IPAddress myIP = WiFi.softAPIP(); // WiFi.softAPIP()でWiFi起動 server.on("/", handleRoot); server.on("/offsetXm", offsetXm); server.on("/offsetXp", offsetXp); server.on("/offsetYm", offsetYm); server.on("/offsetYp", offsetYp); server.on("/KpP", KpP); server.on("/KpM", KpM); server.on("/KdP", KdP); server.on("/KdM", KdM); server.on("/KwP", KwP); server.on("/KwM", KwM); server.on("/IDRSp", IDRSp); server.on("/IDRSm", IDRSm); server.on("/delayTimeP", delayTimeP); server.on("/delayTimeM", delayTimeM); server.begin(); for (;;) { server.handleClient(); nowTime = micros(); loopTime = nowTime - oldTime; oldTime = nowTime; dt = (float)loopTime / 1000000.0; //sec get_theta(); get_gyro_data(); //カルマンフィルタ 姿勢 傾き kalAngleX = kalmanX.getAngle(theta_X, theta_Xdot, dt); kalAngleY = kalmanY.getAngle(theta_Y, theta_Ydot, dt); //カルマンフィルタ 姿勢 角速度 kalAngleDotX = kalmanX.getRate(); kalAngleDotY = kalmanY.getRate(); Serial.print(kalAngleX); Serial.print("\t"); Serial.println(kalAngleY); //LED表示 for(int i = 0; i < NUM_LEDS; i++){ leds[i] = CRGB::Black; } if(kalAngleX > 20.0){ for(int i = 0; i < 5; i++){ leds[i] = CRGB::Red; } }else if(kalAngleX <= 20.0 && kalAngleX > 12.0){ for(int i = 0; i < 5; i++){ leds[i] = CRGB::Green; } }else if(kalAngleX <= 12.0 && kalAngleX > 4.0){ for(int i = 0; i < 5; i++){ leds[i + 5] = CRGB::Green; } }else if(kalAngleX <= 4.0 && kalAngleX > 1.0){ for(int i = 0; i < 5; i++){ leds[i + 10] = CRGB::Green; } }else if(abs(kalAngleX) <= 1.0){ for(int i = 0; i < 5; i++){ leds[i + 10] = CRGB::Blue; } }else if(kalAngleX >= -4.0 && kalAngleX < -1.0){ for(int i = 0; i < 5; i++){ leds[i + 10] = CRGB::Green; } }else if(kalAngleX >= -12.0 && kalAngleX < -4.0){ for(int i = 0; i < 5; i++){ leds[i + 15] = CRGB::Green; } }else if(kalAngleX >= -20.0 && kalAngleX < -12.0){ for(int i = 0; i < 5; i++){ leds[i + 20] = CRGB::Green; } }else if(kalAngleX < -20.0){ for(int i = 0; i < 5; i++){ leds[i + 20] = CRGB::Red; } } if(kalAngleY > 20.0){ for(int i = 0; i < 5; i++){ leds[i * 5] = CRGB::Red; } }else if(kalAngleY <= 20.0 && kalAngleY > 12.0){ for(int i = 0; i < 5; i++){ leds[i * 5] = CRGB::Green; } }else if(kalAngleY <= 12.0 && kalAngleY > 4.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 1] = CRGB::Green; } }else if(kalAngleY <= 4.0 && kalAngleY > 1.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 2] = CRGB::Green; } }else if(abs(kalAngleY) <= 1.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 2] = CRGB::Blue; } }else if(kalAngleY >= -4.0 && kalAngleY < -1.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 2] = CRGB::Green; } }else if(kalAngleY >= -12.0 && kalAngleY < -4.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 3] = CRGB::Green; } }else if(kalAngleY >= -20.0 && kalAngleY < -12.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 4] = CRGB::Green; } }else if(kalAngleY < -20.0){ for(int i = 0; i < 5; i++){ leds[i * 5 + 4] = CRGB::Red; } } FastLED.show(); delay(delayTime); disableCore0WDT(); } } void setup() { Serial.begin(115200); RollerI2C0.begin(&Wire, 0x64, 26, 32, 400000); RollerI2C1.begin(&Wire, 0x65, 26, 32, 400000); RollerI2C2.begin(&Wire, 0x66, 26, 32, 400000); //パラメータ初期値取得 preferences.begin("parameter", false); offsetX = preferences.getFloat("offsetX", offsetX); offsetY = preferences.getFloat("offsetY", offsetY); Kp = preferences.getFloat("Kp", Kp); Kd = preferences.getFloat("Kd", Kd); Kw = preferences.getFloat("Kw", Kw); IDRS = preferences.getFloat("IDRS", IDRS); delayTime = preferences.getInt("delayTime", delayTime); //回転位置検出 タスク xTaskCreatePinnedToCore( displayIMU , "display" // A name just for humans , 4096 // This stack size can be checked & adjusted by reading the Stack Highwater , NULL , 1 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest. , NULL , 0); delay(1000); RollerI2C0.setMode(ROLLER_MODE_CURRENT); RollerI2C1.setMode(ROLLER_MODE_CURRENT); RollerI2C2.setMode(ROLLER_MODE_CURRENT); RollerI2C0.setOutput(1); RollerI2C1.setOutput(1); RollerI2C2.setOutput(1); } void loop() { if (fabs(kalAngleX) < 1.0 && fabs(kalAngleY) < 1.0 && GetUP == 0) { GetUP = 80; } if(GetUP == 80){ //ブレーキ if(fabs(kalAngleX) > 20.0 || fabs(kalAngleY) > 20.0){ RollerI2C0.setCurrent(0); RollerI2C1.setCurrent(0); RollerI2C2.setCurrent(0); AjX = 0.0; AjY = 0.0; GetUP = 0; } //モータ回転 velY = -RollerI2C0.getSpeedReadback() / 100.0; AjY += IDRS * velY / 10000.0; MY = (Kp * (kalAngleY + AjY) + Kd * kalAngleDotY / 10.0 + Kw * velY / 10.0) * 1000.0; velX = 0.5 / 100.0 * (-RollerI2C1.getSpeedReadback() + RollerI2C2.getSpeedReadback()); AjX += IDRS * velX / 10000.0; MX = (Kp * (kalAngleX + AjX) + Kd * kalAngleDotX / 10.0 + Kw * velX / 10.0) * 1000.0; M0 = MY; M1 = -0.5 * MY + 0.866 * MX; M2 = 0.5 * MY + 0.866 * MX; RollerI2C0.setCurrent(-M0); RollerI2C1.setCurrent(-M1); RollerI2C2.setCurrent(M2); }else if(GetUP == 0){ RollerI2C0.setCurrent(0); RollerI2C1.setCurrent(0); RollerI2C2.setCurrent(0); } } |
コード説明
L. 10 Roller485モータのオブジェクト生成。
ここでは真ん中のモータをRollerI2C0、左をRollerI2C1、右をRollerI2C2としました。
L. 19~25 WiFi設定 SSID、パスワード、IPアドレスは適宜変えてください。
L. 31~37 パラメータ値指定
これらを調整して点倒立動作を実現させる。後述のブラウザアプリでも変更できます。
L. 59~65 傾斜計算
加速度センサからX軸とY軸の傾斜角を算出する関数
コードやアプリで各軸のオフセット調整 (offsetX, offsetY)が可能です。

L. 67~72 角速度取得関数
X軸とY軸の角速度を検出
L. 75~279 ブラウザアプリ表示設定
APモード接続時の各パラメータ設定用の表示を記述しています。
L. 282~443 core0動作
ATOM Matrix デュアルコアのcore0でLEDディスプレイ表示とIMUセンサの処理とブラウザ表示およびハンドラ処理を実行します。
IMUセンサMPU6886のフルスケールレンジは以下で指定 (L. 290, 291)
・加速度:16bit ±2 g
・ジャイロ(角速度):16bit ±250 deg/sec
カルマンフィルタライブラリの関数を用いてセンサの姿勢角と角速度を算出 (L. 331~347)。
センサのオフセット確認用に算出したX軸、Y軸の角度をシリアル出力しています (L. 349~351)。
機体のX軸とY軸の角度を以下の通りLEDインジケータ表示しています。
・±1°以下:中心で緑表示
・±20°以上:赤表示
・その他:青表示
delayTime でcore0の制御ループ時間を調整します (L. 439)。
L. 447~487 setup関数
Roller485 I2C設定 (L. 450~452)
本プログラムではWire0でRoller485とWire1でIMUセンサとI2C通信します。
ブラウザアプリで設定した各オフセット値はPreferences機能でフラッシュに記録します。
電源起動時にフラッシュに記録されたオフセット値を読み出します (L. 455~465)
Roller485をカレントモード (トルク指定駆動)にして起動 (L. 481~486)。
L. 490~529 loop関数
センサのX軸、Y軸が共に角度±1°以下になるとモータを起動します (L. 491~493)。
センサの角度が±20°以上になるとモータを停止させます (L. 498~505)。
センサによるX軸とY軸の傾斜角と角速度とモータの回転速度から各軸の安定に必要なトルクを計算します (L. 508~514)。
X軸のモータ回転速度は左右のモータの速度の平均をフィードバックしています (L. 512)。
それぞれの値にかける係数Kp, Kd , Kwを調整して倒立を実現します。
パラメータが極端に大きくなったり小さくなったりしないように各パラメータ値は割って正規化しております。
またモータの回転速度をセンサ角度にフィードバックして安定性の向上を図っています(L. 509, 513)
このフィードバックのかけ具合は係数IDRSで調整します。
これによって機体にオフセットがあったり床が傾いてもモジュールの安定ターゲット角度が自動で調整されホイールの回転が抑制されます。
必要ない場合はIDRS = 0.0としてください。
先ほど算出したモジュールのX, Y軸の必要トルクに基づいて各モータのトルクを指定します (L. 516~522)。
真ん中のモータM0はY軸上に配置しているのでY軸によるトルク(MY)で回転させます。
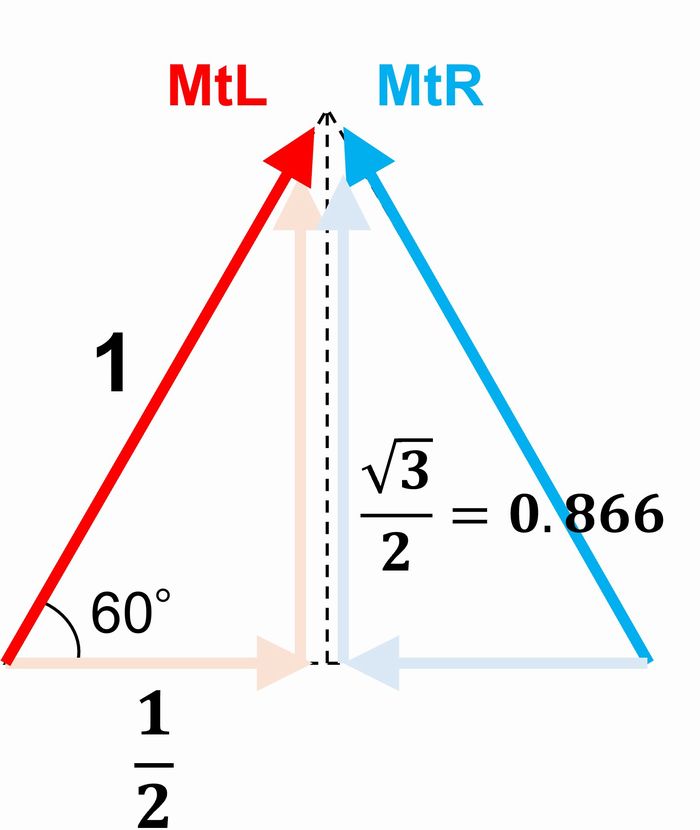
左右のモータはセンサのX軸、Y軸に対してそれぞれ斜めに配置されているので、各軸の必要トルクを振り分けて回転デューティを算出します。
左右モータの回転トルクは以下のように軸上に分解されて、Y軸の傾きによるトルクは左右で打ち消してX軸によるトルクにのみ寄与するように回転させます (L. 517, 518)。
算出した各モータトルクで回転実行 (L. 520~522)。
アプリ画面
-
アプリを書き込んだATOMS3を起動して、スマホもしくはPCのWiFi接続設定でSSID ”S-3 Roller”に接続
パスワード:password -
ブラウザで”192.168.122.133”にアクセス
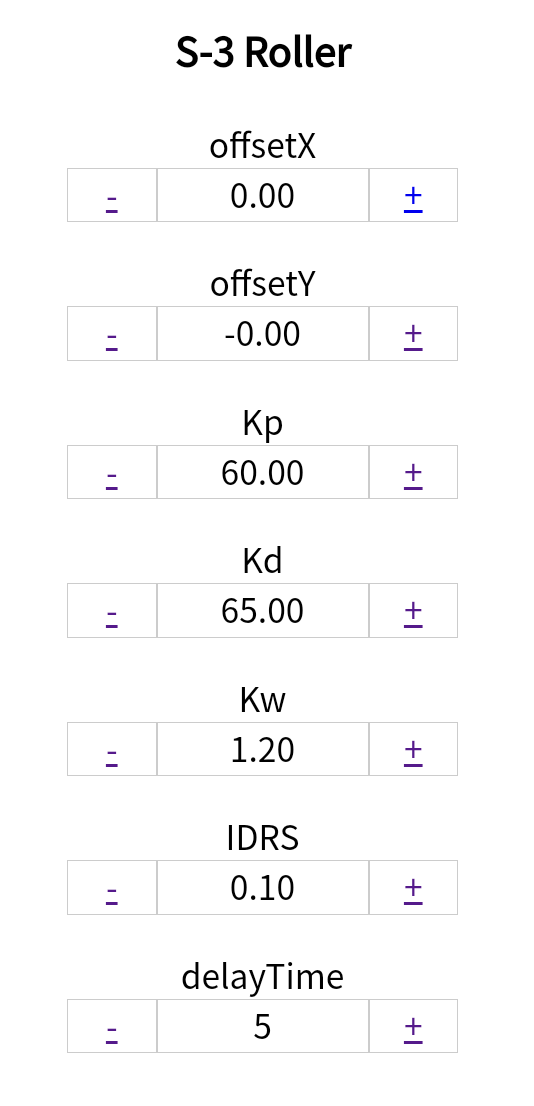
パラメータは “-“、”+”をクリックして値を増減させます。
値は電源OFF後も保持されます。
動作
筐体上蓋 body3.stl はスナップフィット的にカチャっとハメて固定します。
チャントハメタス pic.twitter.com/FwmmMByn2M
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
4ピンコネクタをATOMにも接続し、LiPoバッテリコネクタを接続すると起動します。
私は粗野な人間なのでバッテリ直結でON/OFFしていますが当然スイッチを挿入するのがジェントルです。
Roller485 Lite ユニットに5V DCDCが内蔵されており4ピンコネクタからATOMに5V供給されるので電源系も非常にシンプルです。
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
機体を起上てX軸とY軸の傾きが共に±1°以内になるとモータが回転し始めますので直ぐに手を放してください。
LEDのインジケータが助けになります。
起き上げ方 pic.twitter.com/tWj8lxjbqM
— HomeMadeGarbage (@H0meMadeGarbage) October 22, 2024
センサ自体のオフセットが大きい場合には倒立ができない場合があります。
ATOM単体を平らなところに置いて起動し、シリアル出力される角度が0に近いかご確認ください。
大きくズレがある場合にはアプリのOffsetX、offsetYで0に近い値にしてください。
おわりに
ここではRoller485 Lite ユニットを用いた3軸姿勢制御モジュールの製法を紹介いたしました。
Roller485が非常にスマートで使いやすいユニットのため機体構成はこの上なくシンプルになり製作も容易でした。
マジで世界一簡単に組める3軸姿勢制御モジュールになったのではないでしょうか?
スペーサとネジでステージ stage.stl を追加すれば、ちょっとした小机にもなります。
SHISEIGYO-3 Roller
同梱の stage.stl を活用することで、ちょっとした小机にもなります。 pic.twitter.com/Wbjo86ma3S— HomeMadeGarbage (@H0meMadeGarbage) October 23, 2024
ガンダムMk-II pic.twitter.com/C1bxcpeF6p
— HomeMadeGarbage (@H0meMadeGarbage) October 19, 2024
是非 点倒立の喜びを体感いただければと思います。
DCモータを使用した小型3軸姿勢制御モジュールの製法も以下で紹介しておりますのでよろしければご覧ください。
こちらからは以上です。
追記
SHISEIGYO-2 Roller (2024/11/5)
ホイール2個でも点倒立は可能なのでやってみた。

関連記事
 3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
3軸姿勢制御モジュール SHISEIGYO-3 DC の製法
 6重倒立に向けて③ ーリアクションホイールへの道66ー
6重倒立に向けて③ ーリアクションホイールへの道66ー
 SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
 SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
3軸姿勢制御モジュールの製法 非常に参考に なりました。取り敢えず1軸で作ってみたのですが 調整無しで いきなり倒立出来ました。また、30分程放置していましたが 姿勢も安定して いました。
設計の完成度の高さに 驚きました。部品をそろえて3軸倒立に 挑戦したいと思います。
すばらしい情報を 公開して頂き ありがとうございます。
追記…私の環境では wdtエラーが 出た為 441行を コメントアウトしました。
実機検証の貴重なご報告いただけて大変うれしいです。
環境へのご対応もありがとうございます!