
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
本記事にはアフィリエイト広告が含まれます。
姿勢制御モジュールのホイールにLEDを付けてバーサライタにしてみてはどうだろう。
思いついてしまったので どうなるかは考えずに作り上げることだけを考えて手を動かした。
ちょうど祝日 天皇誕生日。俺なりの祝いの儀式だ。
とにかく作る
1軸 姿勢制御モジュール SHISEIGYO-1のホイールにLEDをつけてバーサライタ動作させます。
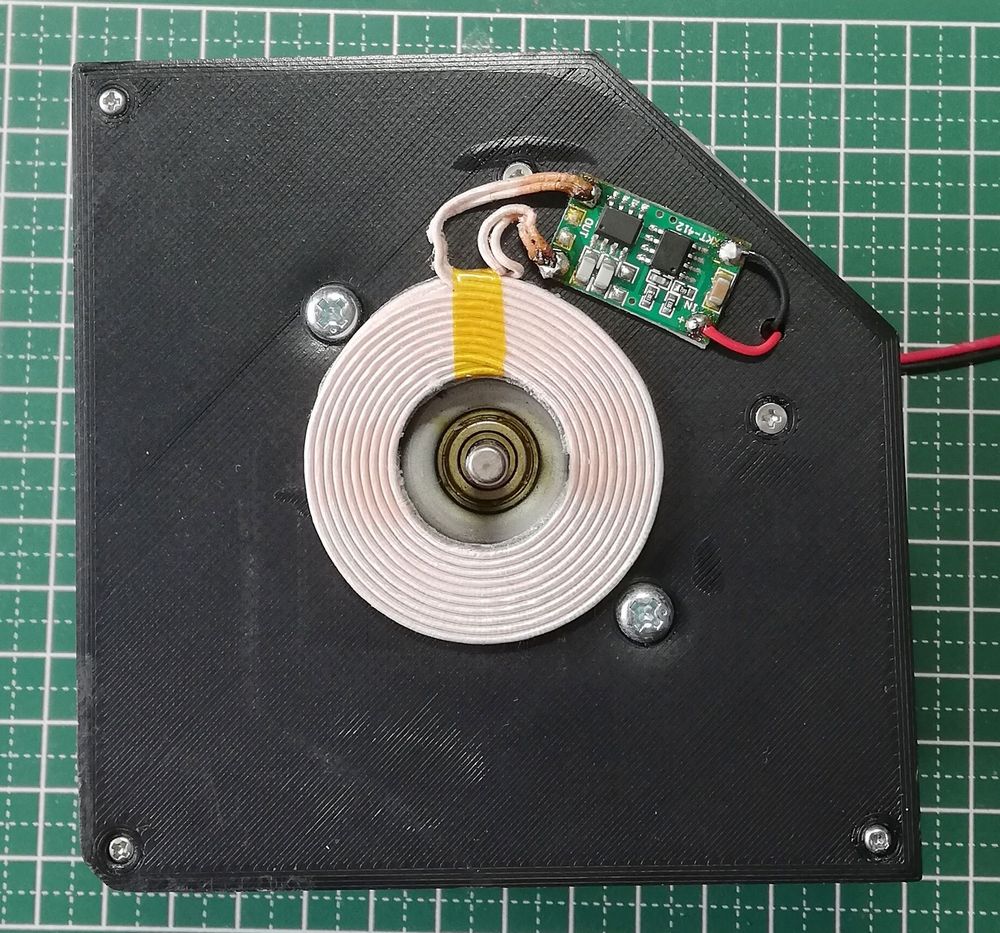
回転部への給電はハンディバーサライタ PovRanianの機構をそのまま利用してワイヤレスチャージモジュールを使用します。
ワイヤレスチャージモジュール送信側をSHISEIGYO-1の筐体に固定。
電源は5V DCDC出力に接続しました。
ホイールにLEDやワイヤレスチャージモジュールの受信部を固定する治具を3Dプリントいたしました。
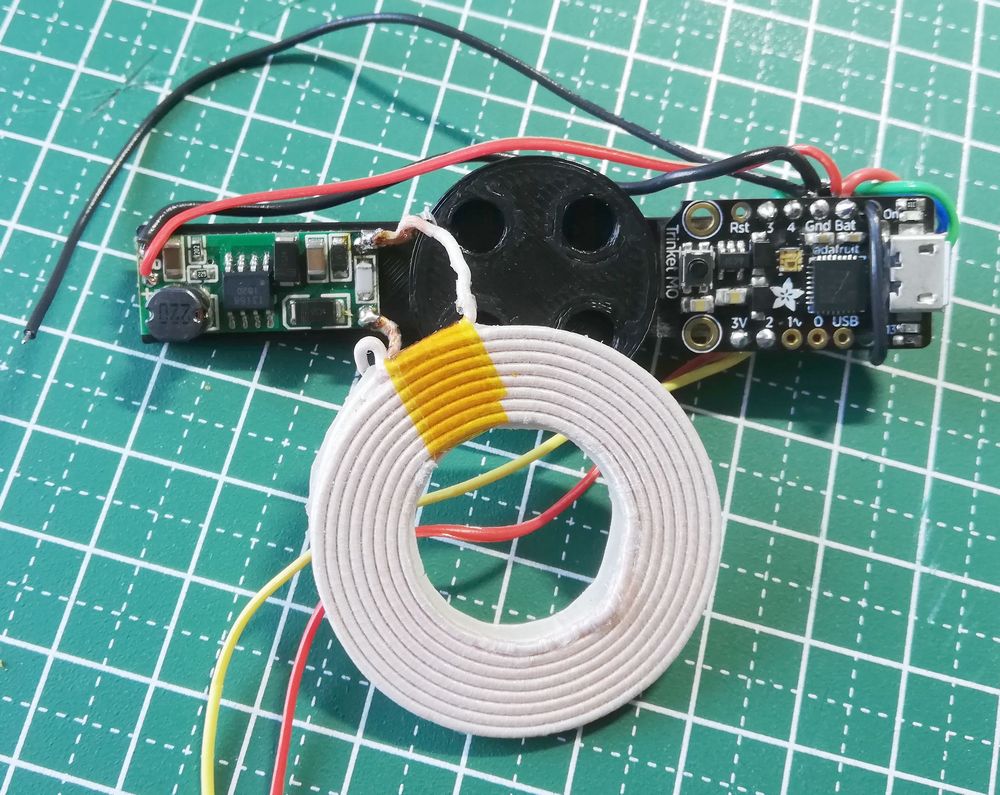
マイコンはAdafruit Trinket M0 を使用しました。
[amazonjs asin=”B07MLWKK6V” locale=”JP” title=”Trinket M0″]
SPI入力のLEDを11セル前面に固定。
更にホイールに固定後に回転を検出するフォトリフレクタセンサも固定します。

[amazonjs asin=”B07VGH4XSQ” locale=”JP” title=”APA102 5050 SMD高輝度チップLEDピクセルフレキシブルストリップライトDC 5V (白 PCB, 1M 144leds IP20)”]
ホイールを固定して完成!

筐体に貼ったマスキングテープの白マーカをフォトリフレクタで検出します。
動作
ゲーミング 姿勢制御モジュール pic.twitter.com/2q7VMKPAAf
— HomeMadeGarbage (@H0meMadeGarbage) February 23, 2022
プログラム的にはフォトリフレクタセンサで回転時間を検出して、1周の時間を4分割してLEDを赤、緑、青、黄で光らせます。
姿勢制御モジュールの場合は回転速度常時変化するのでマーカ1個で回転検出するPovRanian形式だときれいな絵を出すのが難しいです。
ブラシレスモータのエンコーダ出力を利用できれば回転速度や正転・逆転に関係なく絵が出せそうですが無線では厳しいと思います。
いつかスリップリングを使用した有線でのバーサライタ動作も試してみたいです。
次の記事

関連記事
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー