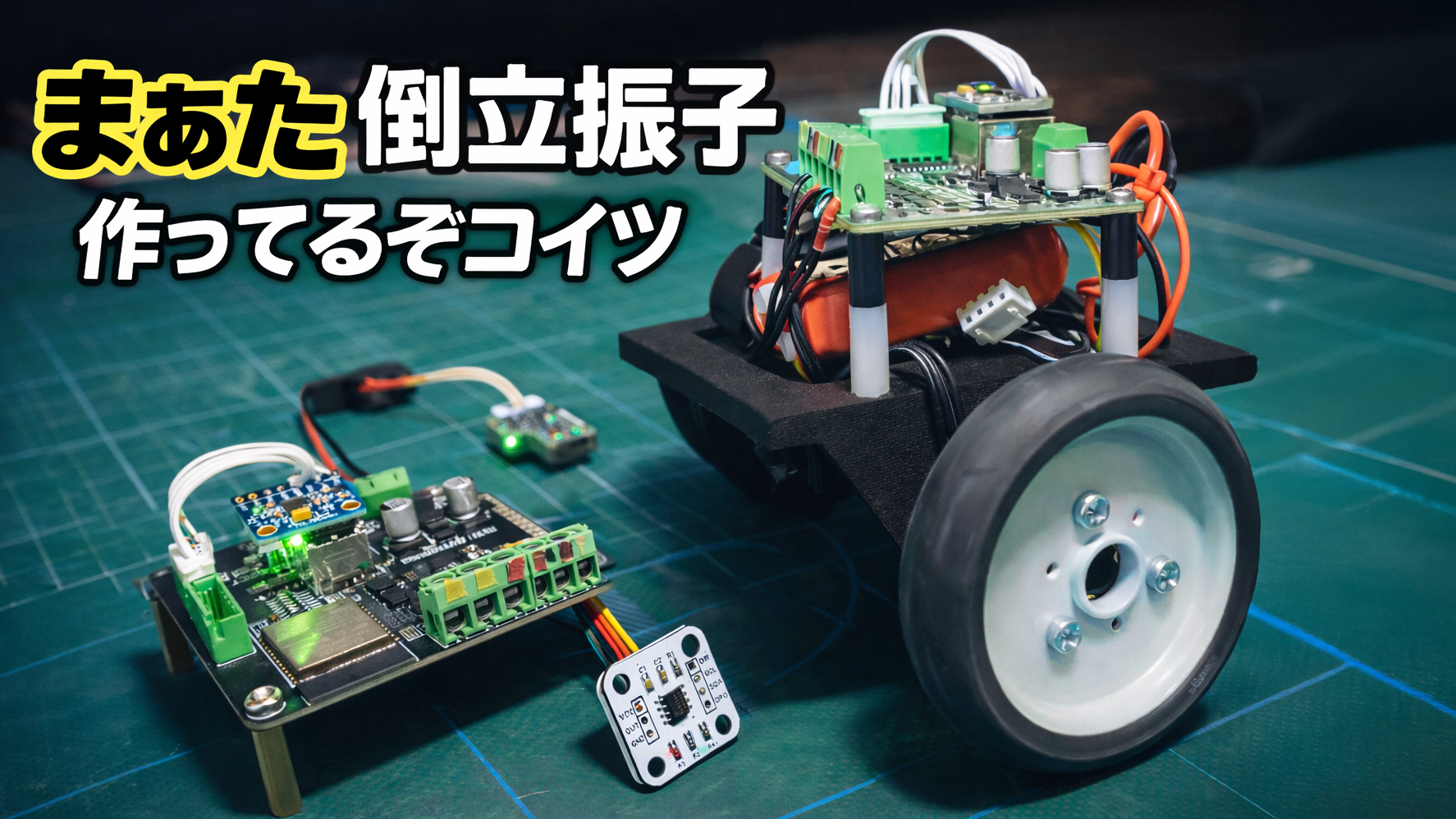
まぁた 倒立振子 作ってるぞコイツ
本記事にはアフィリエイト広告が含まれます。
ちょっと自分の中で課題というか興味がありまして
“足のない単純な構造の車輪倒立振子のボディを斜面でどうやって平行に保つのか”
【宿題】
こういう重心移動できない倒立振子
坂道でボディどうやって平行に保つのか pic.twitter.com/AmhS6Qd7oq— HomeMadeGarbage (@H0meMadeGarbage) February 4, 2026
機体の傾きをフィードバックしてモータトルクや回転速度にしてるので、斜面で機体を傾けて釣り合いをとるのは自然なことなのだけど
うまい事制御してなんとかできないんだべか?
上の動画の機体は以下の倒立振子に改造してしまったので
ここでは検証用の素体となる倒立振子の製作からはじます。
相変わらず倒立振子ばかりつくってんね。

目次
倒立振子の製作
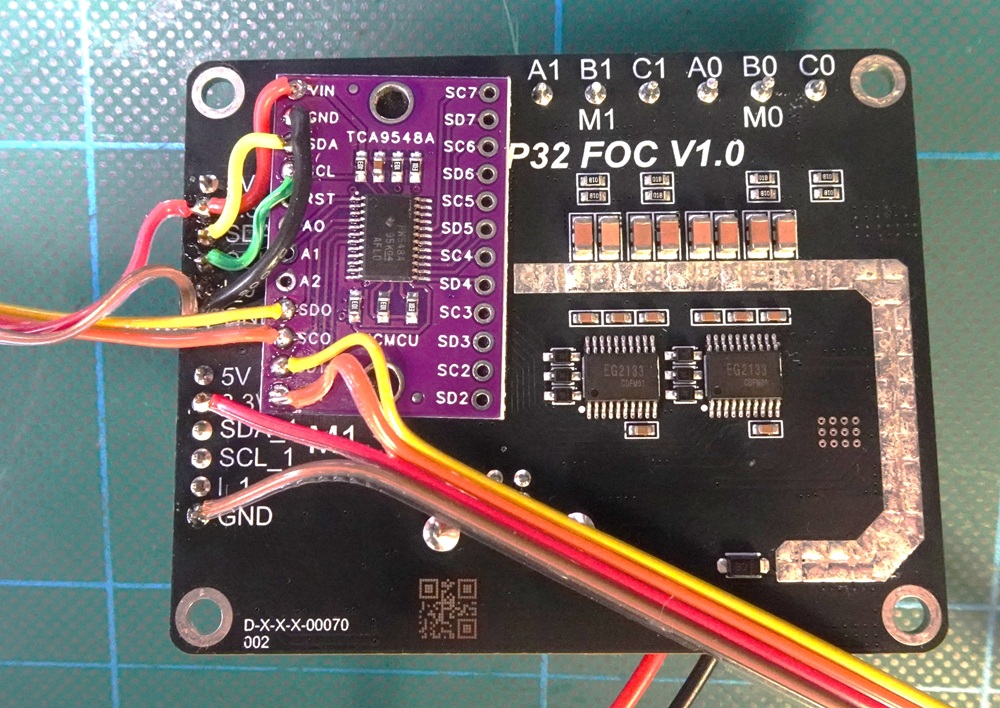
コントローラには MKS ESP32 FOC V1.0 を採用
IMUはMPU6050を使用
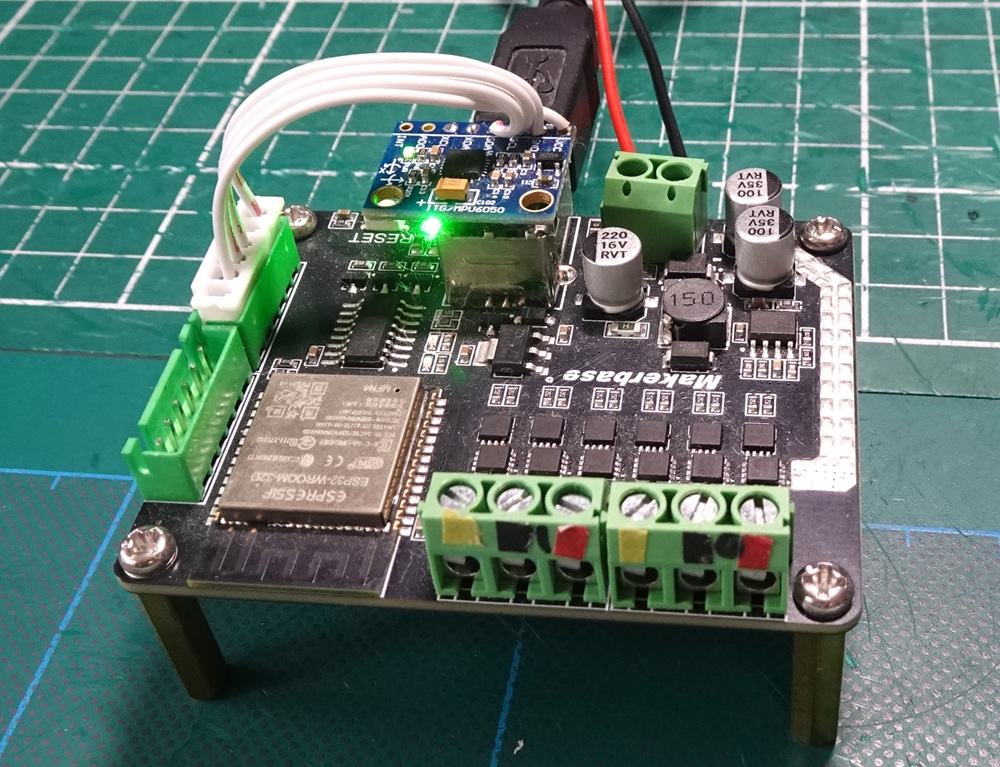

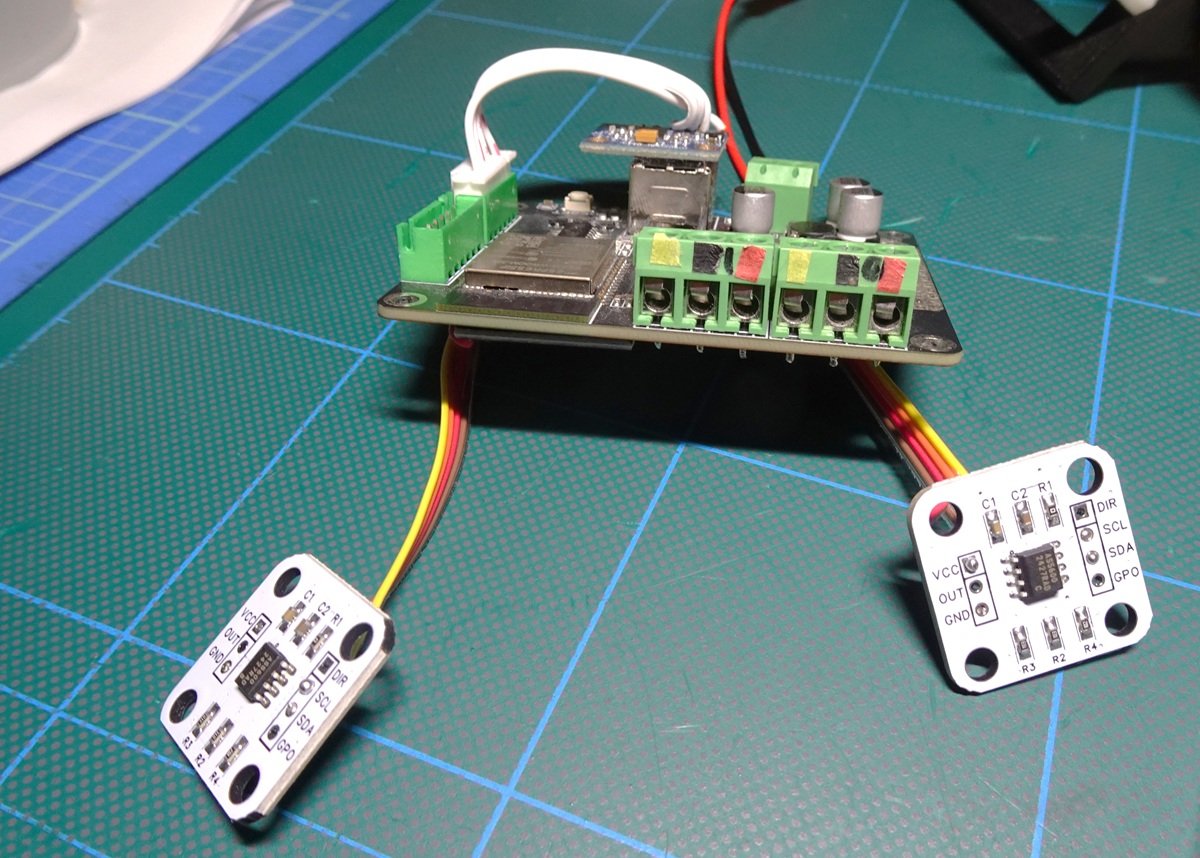
使用する磁気エンコーダのインターフェースはI2Cで2個接続するのですが、IMUでI2Cを1個使ってしまっているので
エンコーダはマルチプレクサ TCA9548Aで2個を集約させます。
筐体を3Dプリントしてブラシレスモータ追加
2204 BLDC pic.twitter.com/O3pxaWkMBG
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2026
2204マイクロBTZモーター、260kv 12n14p DC12V
タイヤはタミヤ
タミヤのタイヤ pic.twitter.com/J0i0JMhPRX
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2026
電源は3セル LiPoバッテリ
LiPoバッテリ pic.twitter.com/fA0sxmsIe4
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2026
PS4コントローラで制御
PSコントローラ pic.twitter.com/tL0niPCPVQ
— HomeMadeGarbage (@H0meMadeGarbage) February 19, 2026
無事に倒立振子 完成
倒立振子 pic.twitter.com/s55aVBObKO
— HomeMadeGarbage (@H0meMadeGarbage) February 21, 2026
モータは SimpleFOC の速度制御で回転
IMUによる機体角度と角速度、モータの回転速度をフィードバックして倒立&走行
別ループで回転を制御
坂道
早速完成した倒立振子で坂道走行
坂でもボディを平行に保ちたいんだけど pic.twitter.com/59xO3gySeF
— HomeMadeGarbage (@H0meMadeGarbage) February 20, 2026
当然、機体は傾く
機体角度を積算してモータ回転速度に変換するとか試したけどうまくいかなかった。
足のある倒立振子だと機体の傾きで足を前後させる制御で重心移動できるので、
機体を平行に保つことは可能なんだよ当然
足あれば重心移動できるからボディ平行たもてるよねぇ pic.twitter.com/YeZ2rIfu0v
— HomeMadeGarbage (@H0meMadeGarbage) February 20, 2026
おわりに
ここでは検証用の素体倒立振子を製作しました。
足のない倒立振子の坂道ボディ平行保持の手法をこの機体で検証していければなぁと思っていますが。。。
なんか無理な気はしてる
ではまた