合体ロボに憧れて3
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2025 |17日目
Direct Drive Technology社の「D1」への憧れは日に日に増すばかりです。
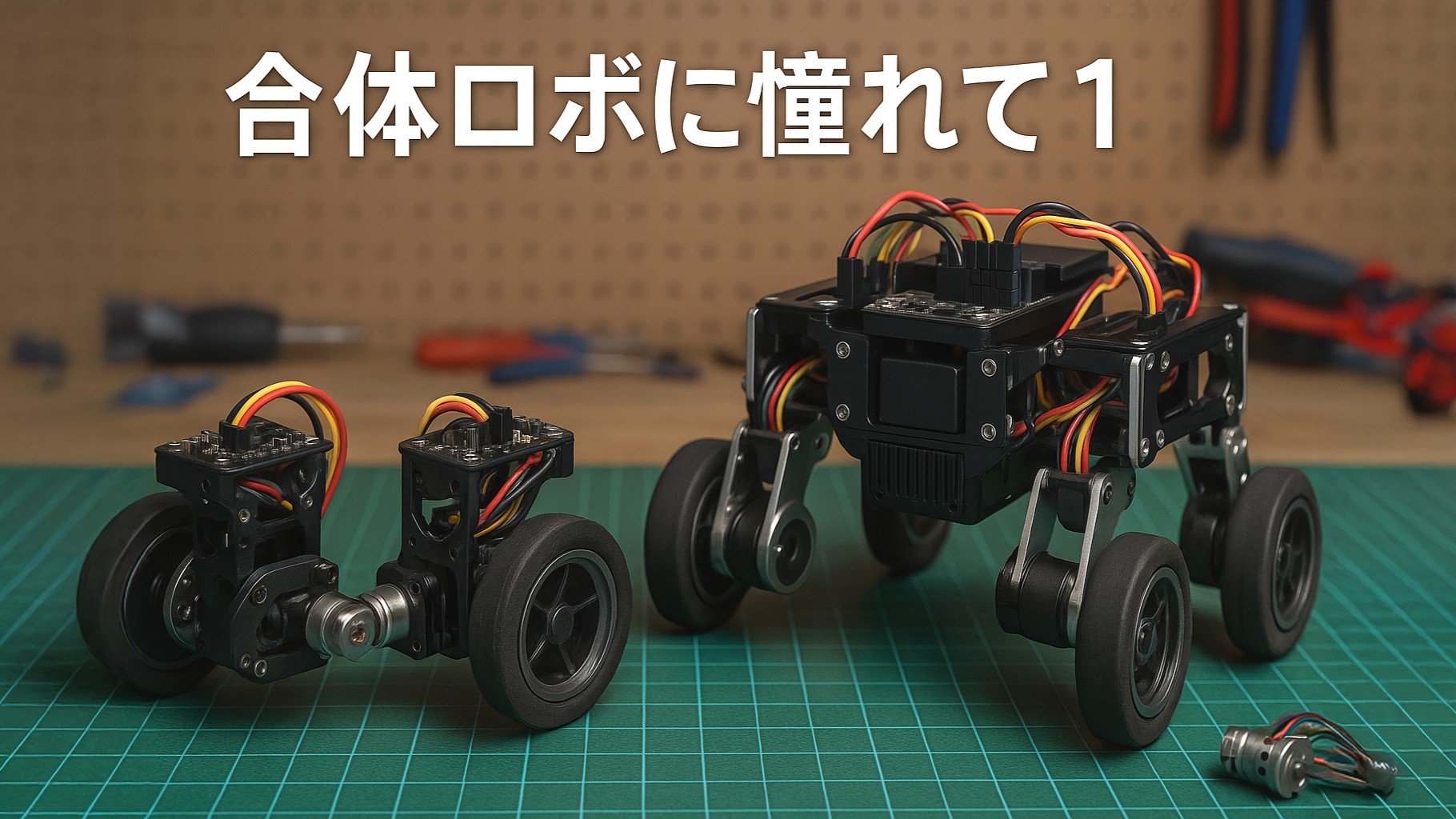
前回は合体ロボの要素となる脚付き2輪倒立振子を製作して基本動作の確認をいたしました。
ここではボディ平行維持を目指して更なる安定倒立を目指します。

目次
合体を見据えて
合体ロボは2機の倒立振子が倒立した状態からの結合を目指しております。
そのためには倒立振子のボディは常に平行姿勢である必要があります。
ピッチ角補正
前回の倒立では足高さ変更による重心シフトを倒立目標角度を変動させて倒立させていました。
そのためボディが斜めに傾いた状態になります。
ここでは外乱や足高さ重心シフトによるボディのピッチ角の傾きを足の前後移動でも補正するようにしました。
ピッチ角補正
わかりにくいけど外乱や足高さ重心シフトによるボディ傾きを足の前後で補正 pic.twitter.com/c7qVkWszAl— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2025
実にインテリジェンスにボディを平行に保てるようになりました。
2軸のシリアルリンク足のおがけで上下に加えて前後移動も可能であることのたまものです。
2025/12/27 追記
目標角シフトと足前後位置の併用してたんだけど双方のバランス調整がむずくてどうしてもプルつくので
足前後位置のみの補正に変更。 2軸足の役得だわな
ピッチ角補正
目標角シフトと足前後位置の併用してたんだけど双方のバランス調整がむずくてどうしてもプルつくので
足前後位置のみの補正に変更
2軸足の役得だわな https://t.co/RNqNvSsKeJ pic.twitter.com/LJO5uDEHYT— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2025
ロール角補正
さらにボディのロール角水平維持を足高さで補正するようにしました。
ロール角補正 pic.twitter.com/DqLM3auDdw
— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2025
動作
ボディ平行維持インテリジェンス制御を手に入れたので気分良く走行
だいぶ いい感じ
最終的な制御パラメータ追い込みは合体機構などを盛り込んだあとに実施することとします。
おわりに
ここでは2輪倒立振子のボディ平行維持インテリジェンス制御の検討を実施しました。
倒立振子単体としてはかなり仕上がってきたので次回はいよいよ合体機構を検討します