ブラシレスモータでサーボ5 - 倒立振子ロボ作製 –
本記事にはアフィリエイト広告が含まれます。
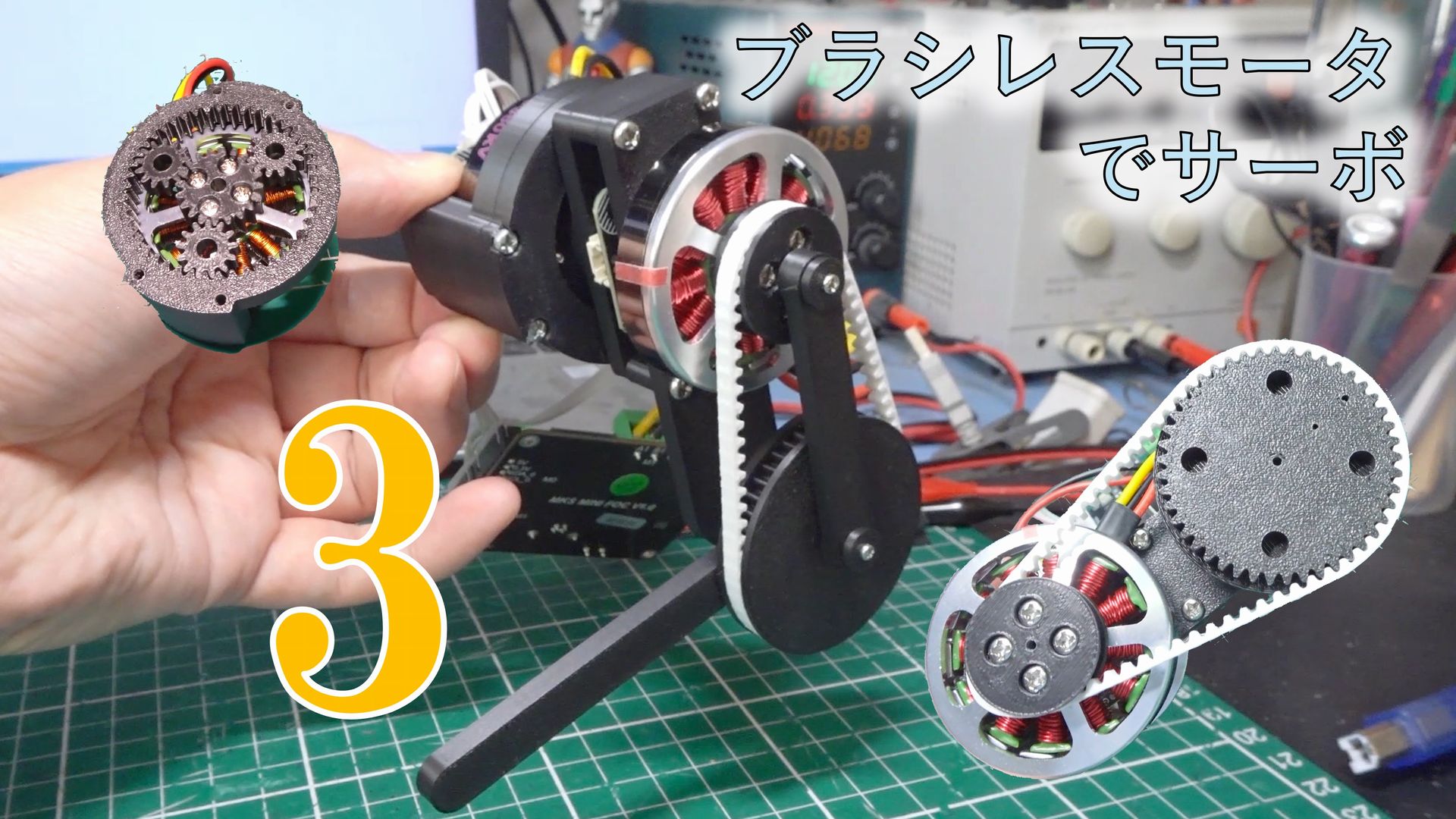
前回はブラシレスモータ (RollerCAN) に遊星ギアを仕込んでトルクの向上を確認しました。
年末からのブラシレスモータやギアの検討により かなり見えてきたこともあり、この収穫を活用する方向に舵をきりたいと思います。

目次
ブラシレスモータサーボの活用を考える
ブラシレスモータサーボを活用してロボットを製作します。
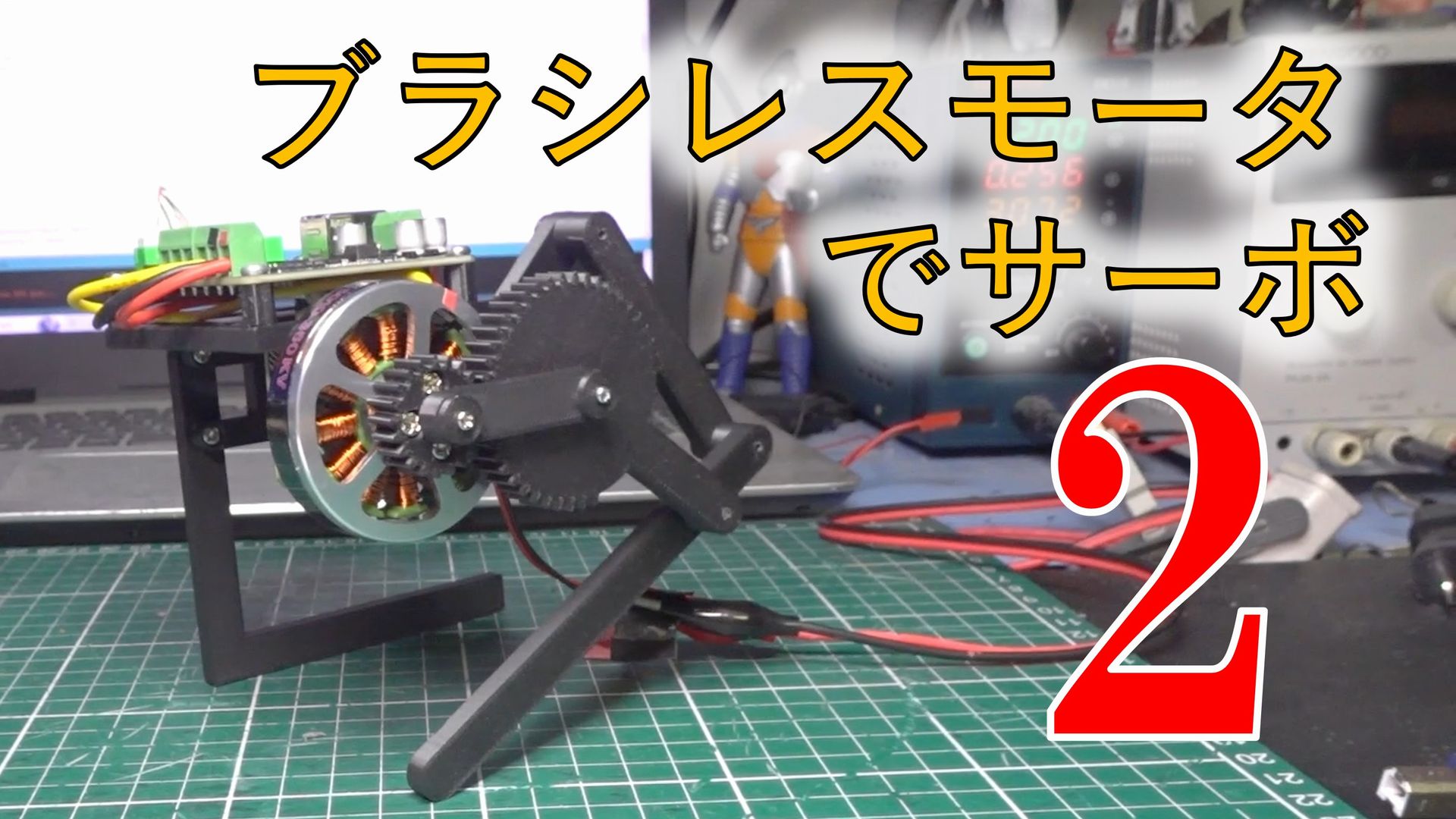
ここでは以下のようにギアとリンク機構を利用した1脚1モータの二輪倒立振子の製作を目指します。
このうまい事やれば弧を描かずリニアに動いてくれるリンクは一般的になんて呼ばれてるのでしょうか? pic.twitter.com/6HvTjz2f2Z
— HomeMadeGarbage (@H0meMadeGarbage) December 19, 2024
この場合関節用のブラシレスモータサーボ2個でロボット作製ができ、リソースを抑えたうえで性能を検証できます。
倒立振子製作
関節サーボ用ブラシレスモータは以下の5010 360KVを使用します。
現状一個しか持っていないので追加購入中。

モータドライバは以下のMKS ESP32 FOC V1.0を使用します。

ESP32を搭載してモータを2個駆動できますが、5010 ブラシレスモータを2個駆動することができなかったのでモータドライバ基板を2個使用してモータ1個づつ駆動することにします。
将来的にはオリジナルのドライバ、エンコーダ、マイコンを載せたブラシレスモータドライバ基板を製作したいと考えているので、それも模擬して今回はモータコントローラ基板2個使用で構成を考えます。
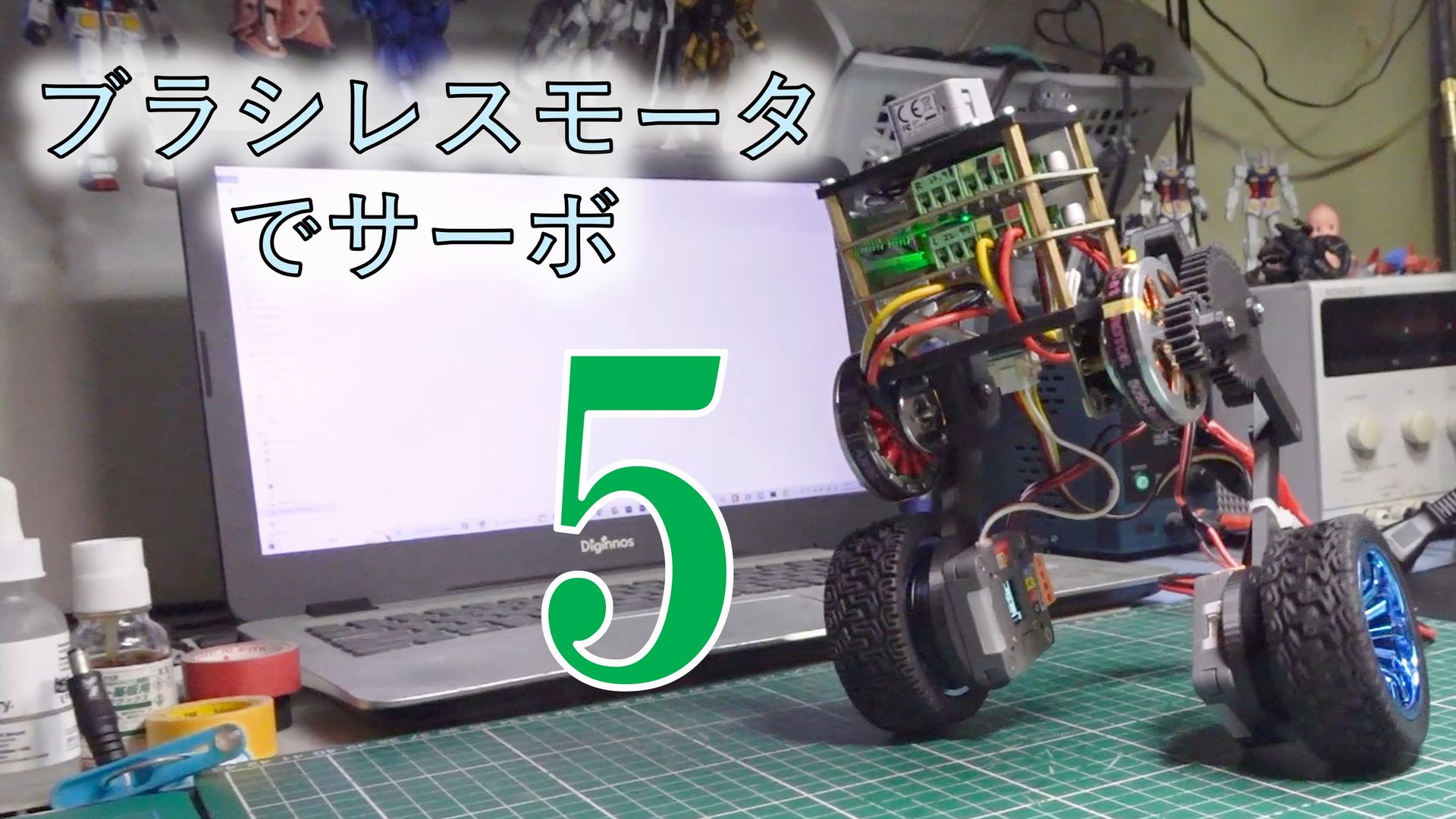
構成 (仮)
コントローラはIMU内蔵のATOM Matrixを使用します。
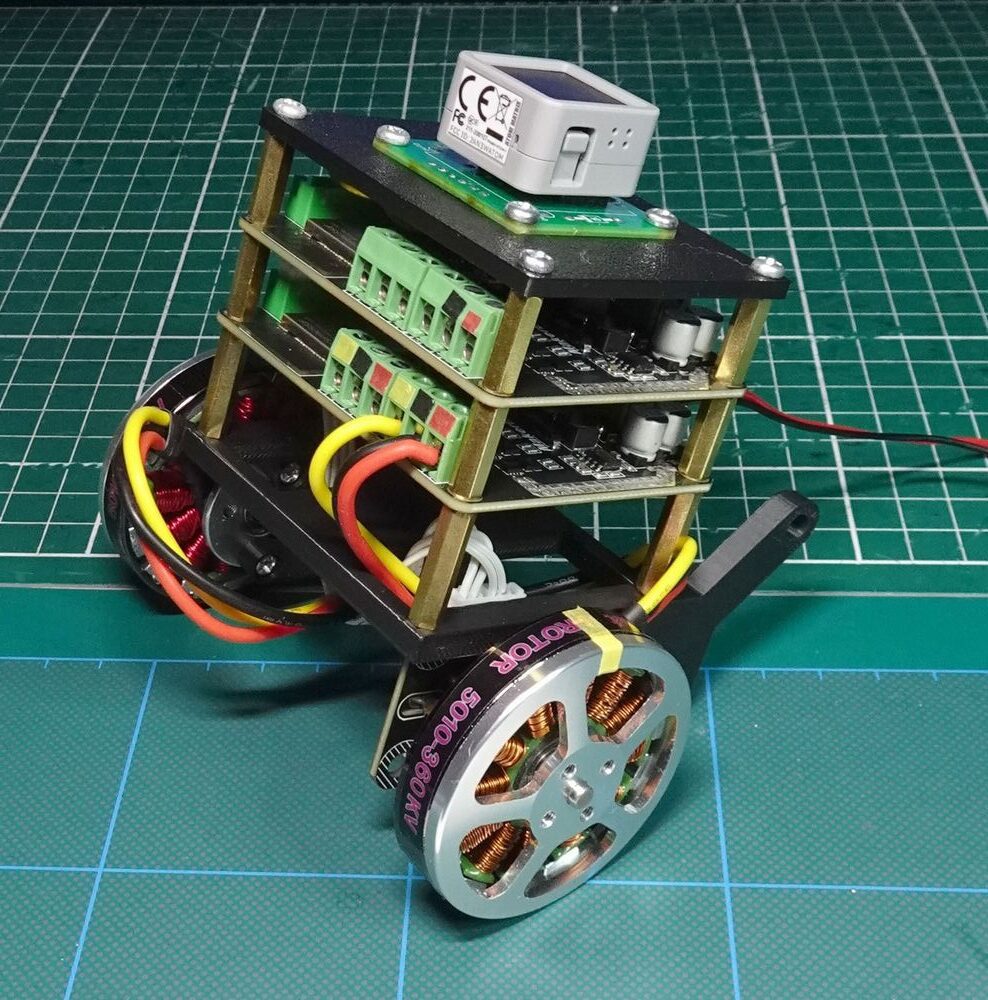
モータドライバ基板を2個スタックww
ブラシレスモータ5010 360KVは1個しかないので、代わりに5010 750KVを載せている。
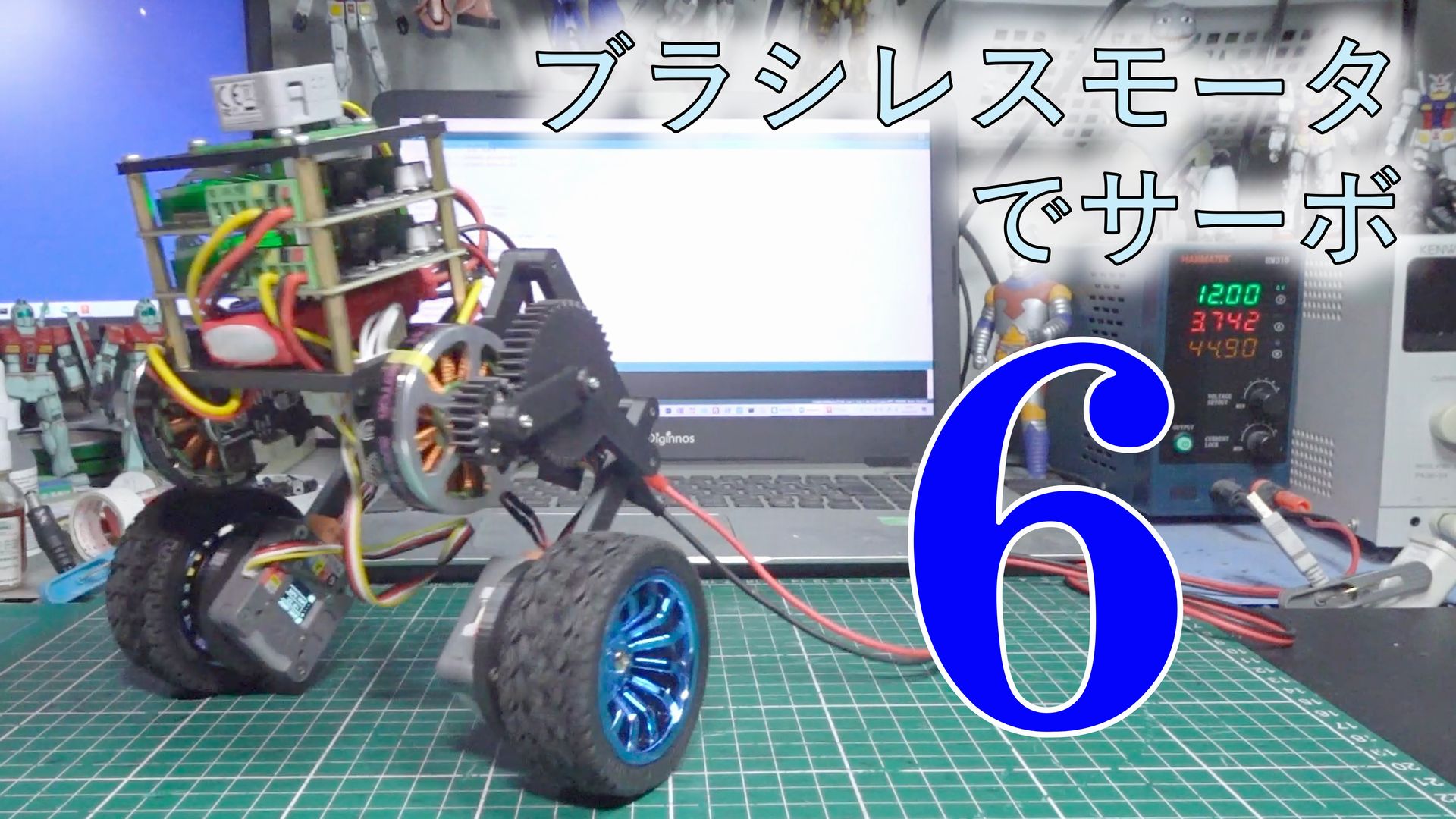
今回製作する倒立振子の構成は以下のとおり
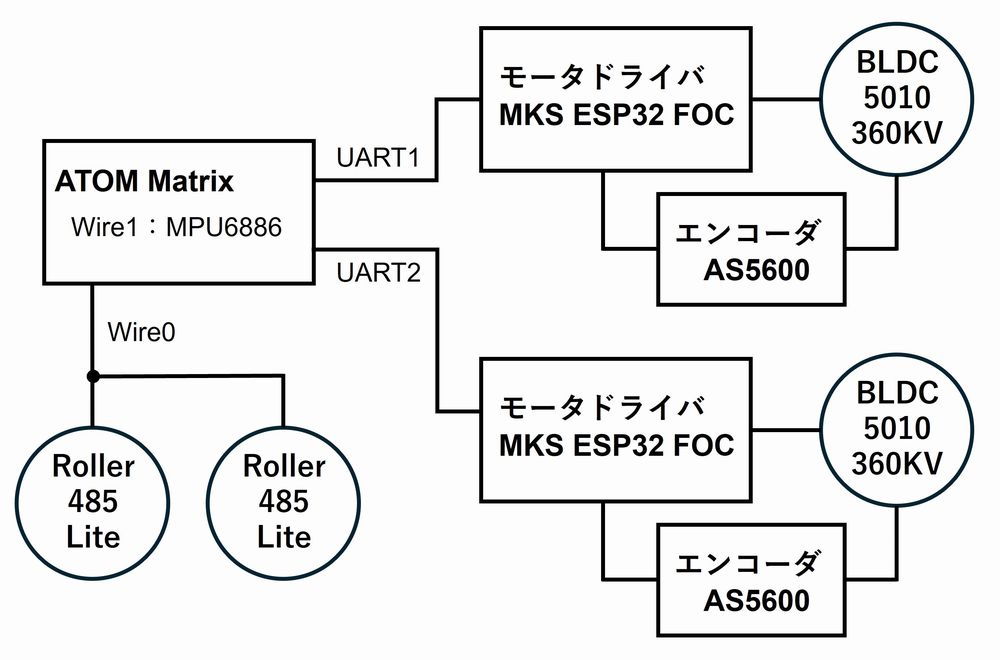
倒立振子のホイール駆動にはM5Stack社のRoller485を使用します。
倒立動作
まずは足を固定して倒立動作を確認します。
固定用の足を3Dプリントして筐体にガッチリネジ止めしています。
またまた構成を変えた pic.twitter.com/1zo5YhPTZH
— HomeMadeGarbage (@H0meMadeGarbage) January 5, 2025
倒立動作が確認できました。
Roller485周りの接続やATOM MatrixのIMUセンサ動作には問題はないようで安心しました。
片足駆動
5010 360KVモータ側の足を以前検討したギアを介したリンク機構に替えて動作を確認しました。
片足だけ動かしてみた pic.twitter.com/iv5agINfS6
— HomeMadeGarbage (@H0meMadeGarbage) January 5, 2025
見事に足を上下できておりトルク不足の心配はないようです。
最後は足を上げ過ぎてタイヤが浮いてしまい転倒ww
足上げ位置の制御には注意を払う必要がありますね。
おわりに
ここではブラシレスモータサーボの性能を確認するために倒立振子の製作を検討し、作業を開始いたしました。
今のところ感触は良いので引き続き部材調達して完成を目指したいと思います。
本倒立振子の構成に至るまでに年末年始にかなり迷走したので思い出として以下に記しておきます。
構成迷走
今回は倒立振子の構成を決めるのにかなり難儀しました。
構成1
まずはESP32搭載のモータドライバ MKS ESP32 FOC V1.0 1台で全て制御しようとしました。
基板にマルチプレクサやIMUセンサMPU6050を追加して、さらにRoller485接続用のコネクタも配線しました。
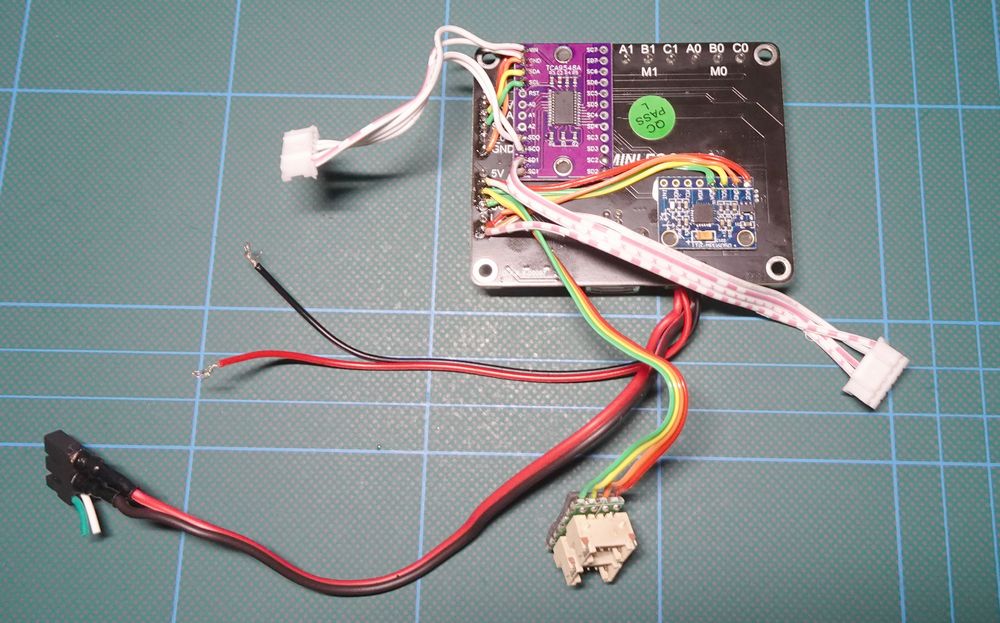
足固定の倒立まで確認しましたが、5010ブラシレスモータサーボの2個駆動が厳しいのでボツ。
ブラシレスモータコントロール基板を加工して倒立動作確認
ブラシレスモータはまだ動かさず足固定 pic.twitter.com/4YGztoYpTb
— HomeMadeGarbage (@H0meMadeGarbage) January 1, 2025
構成2
違うモータドライバを使用することを想定して、ESP32とIMUセンサMPU6050を載せたボードの使用も検討しました。
こちらも足固定の倒立は確認。
倒立振子
制御基板を替えてみての検討 pic.twitter.com/mkjYfiNMod— HomeMadeGarbage (@H0meMadeGarbage) January 3, 2025
モータドライバとしてDRV8311Hモジュールを試しましたが、駆動能力が足りず足をうまく動かせませんでした。
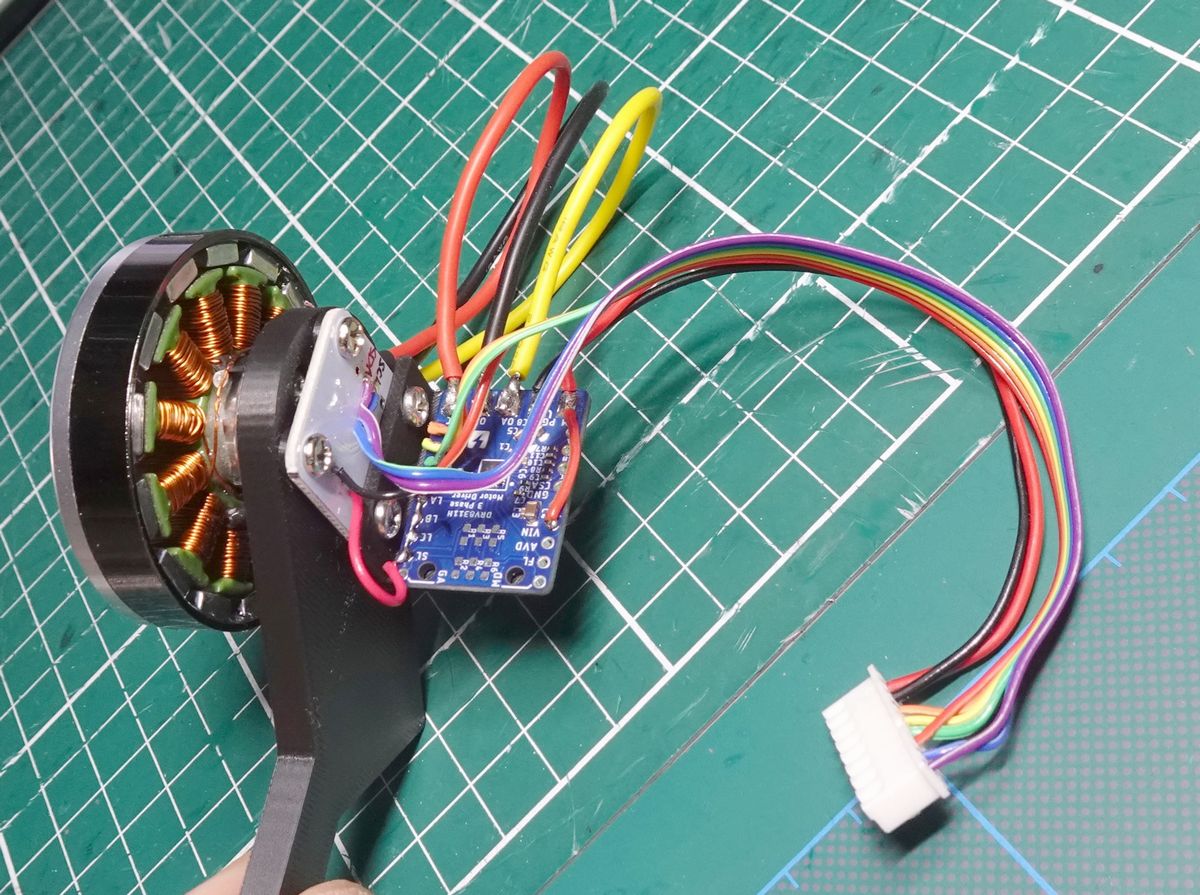
今回の場合モータドライバはパワトラ内蔵じゃない高出力のほうが良さそうです。