ブラシレスモータでサーボ4 - 遊星ギアのトルク –
本記事にはアフィリエイト広告が含まれます。
前回はタイミングベルトと遊星ギアを製作し効能を体感しました。
現在 遊星ギアにかなり魅せられているので深掘りします。

目次
トルク測定
遊星ギアによってトルクが増すことは前回体感したのですが改めて計測によって検証したいと思います。
ここでは RollerCAN を用いてトルク測定してみます。
長さ10cmのアームを3Dプリントしてデジタルスケールでトルクをはかります。

RollerCANをカレントモードで12V印可、200mA 指定で回転させたところ、スケールは 10g を示しました。
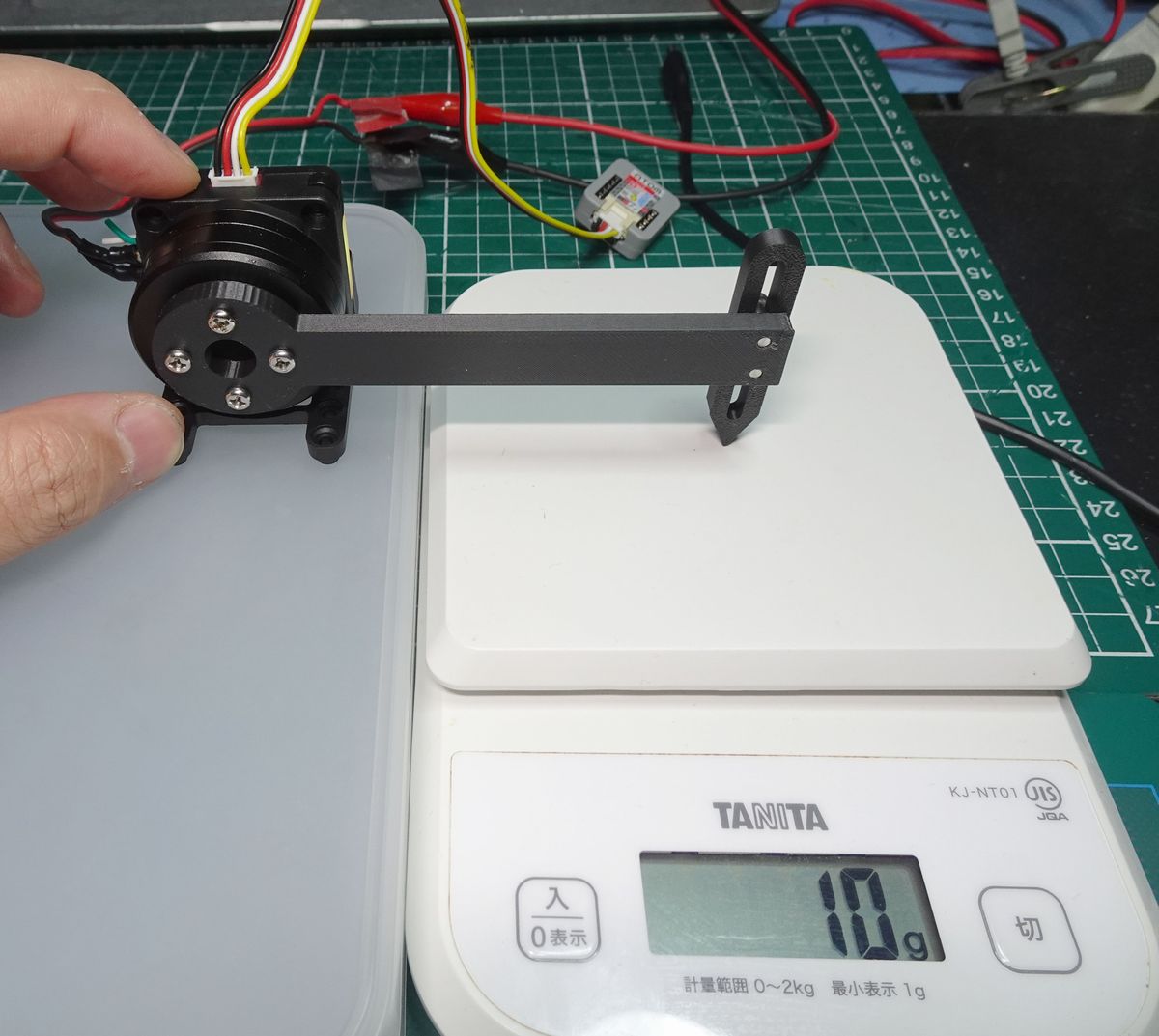
アームが10cmで押す力が10gですので、モータトルクは 0.1 kg・cm ということになります。
遊星ギア
RollerCANに遊星ギアを追加してトルクの増加を計測します。
ギアと筐体を設計して3Dプリント

組立てて回転させました。ええ感じや
コイツしつこいからモータ見たらギア仕込むバケモノになるぞ pic.twitter.com/lsdX33PJ2J
— HomeMadeGarbage (@H0meMadeGarbage) December 29, 2024
トルク
先ほどと同様に12V印可、200mA 指定で回転させてスケールで力を計測しました。
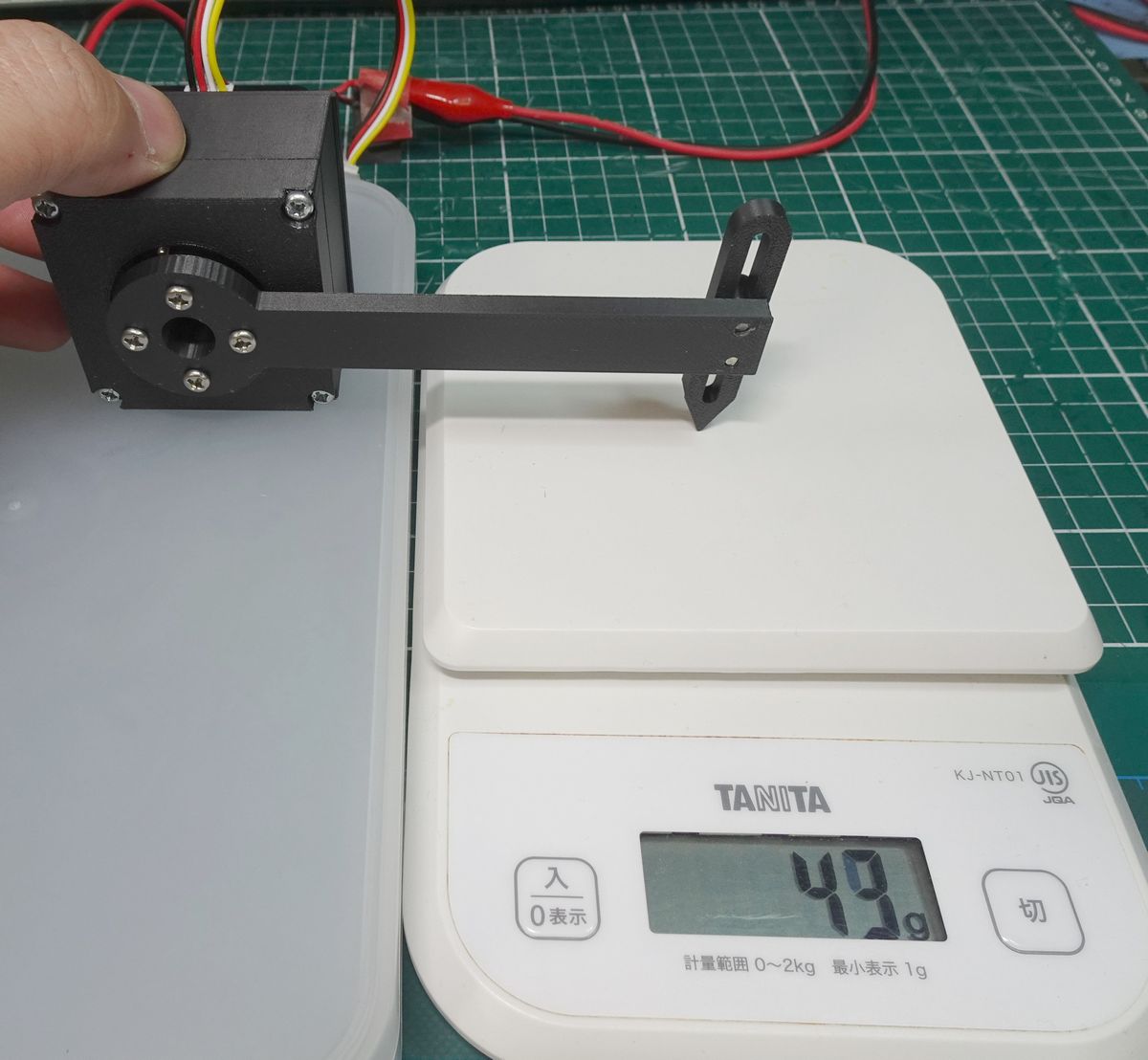
トルクは 0.43kg・cm でした。
今回の遊星ギアは
中央ギア歯数:12
外リング歯数:42
よって減速比:42/12+1= 4.5
実際のトルクも4.3倍となりほぼ理論通りの増加を確認できました。
おわりに
ここでは遊星ギアによるトルク増加を実測によって確認いたしました。
実際に手に取って回せばトルク増加は体感としてわかるのですが、思い出として計測いたしました。
減速比とバッチリ合って、今後のギア比設計の指針となります。
次はギアを活用したブラシレスモータによるサーボでロボットを製作したと考えております。
またお会いいたしましょう。