ブラシレスモータでサーボ6 - 倒立振子ロボ作製2 –
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータサーボの性能を確認するために倒立振子を製作し、片足屈伸まで確認いたしました。
引き続き検討を進めます。

目次
モータパラメータ調整
関節のブラシレスモータはSimpleFOCのクローズドループの回転位置指定モードを使用して駆動しています。
足の位置指定を速くしたところ。。。
あーBLDCのパラメータも調整しないと
バネみたいになってもうてるやん pic.twitter.com/4gZH6X6QwZ— HomeMadeGarbage (@H0meMadeGarbage) January 6, 2025
過制動気味でバネのようにリンギングしています。
クローズドループの回転位置指定モードは以下のようなループで制御されています。
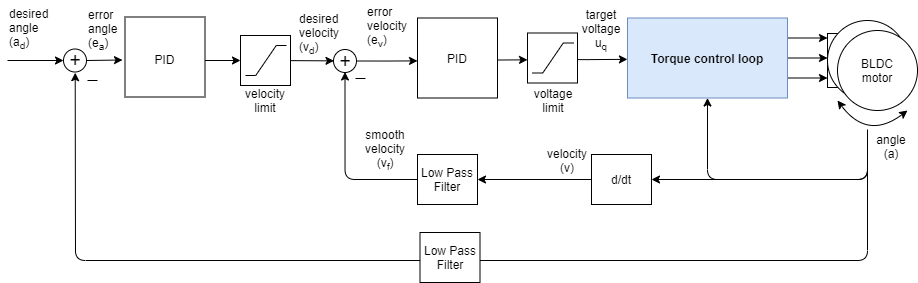
ここでは角度制御PIDのDパラメータの調整でリンギングが低減できました。
モータ2個目到着
購入していたモータがようやく届きました。
やっとモータが届いた pic.twitter.com/GzNwaqduDh
— HomeMadeGarbage (@H0meMadeGarbage) January 6, 2025
ブラシレスモータ 5010-360KVを購入

遂に2脚
追加購入したモータで他方の足関節を構築して遂に2脚ロボットになった!
念願の2脚
関節トルクは申し分なし
足もリニアに上下できてるけど そもそもの付け位置が悪くバランスが良くない
要調整 pic.twitter.com/CYvzapL30Y— HomeMadeGarbage (@H0meMadeGarbage) January 6, 2025
関節トルクは申し分なく見事に屈伸できています。
足もリニアに上下できてるけど、そもそもの付け位置が悪くバランスが良くない。。。
ということで足長を調整してタイヤ位置を下げてバランスを調整しました。
足位置調整してバランス改善
ブラシレスモータによるロボットは動作音が静かだ pic.twitter.com/ymsnOcwP9c
— HomeMadeGarbage (@H0meMadeGarbage) January 6, 2025
バランスも改善してええ感じに屈伸できています。
おわりに
遂にブラシレスモータによるサーボで2脚ロボットが完成しました!
引き続き応答性のチェックやジャンプ動作など確認したいと思います。
楽しみやで