ブラシレスモータでサーボ8 - タイミングベルトとボールベアリング –
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータサーボによる屈伸型倒立振子のジャンプ動作を確認しました。
足が重たくそれほど高くは飛べませんでした。。
足を伸ばしても機体が浮かず、急いで縮めても足に引っ張られてすぐ着地してしまうのです 😥 。

目次
タイミングベルト
足が重たくジャンプの飛距離が出ないため、胴体に重りを追加して相対的に足を軽くする手もあったのですが非力で低価格のモータを工夫して活用しているテーマでそれは絶対にやってはいけないことです。
そこで足を軽くする方向で進めることにしました。
ホイール駆動に使用している Roller485 Lite を動体側に移動してリンクでホイール駆動するのです。
駆動リンクには以前検討したタイミングベルトの使用を考えました。
タイミングベルト pic.twitter.com/JiFX9M0Tsr
— HomeMadeGarbage (@H0meMadeGarbage) January 11, 2025
タイミングベルトはTPUフィラメントで3Dプリントしました。
タイミングベルトを用いて簡単な倒立振子を製作して動作確認。
割とイケるもんですね。
タイミングベルト倒立振子
調整雑だけど味見
結構いけるもんなんだな pic.twitter.com/EtHWl08ZwE— HomeMadeGarbage (@H0meMadeGarbage) January 11, 2025
滑車を2個にすれば足曲げも可能です。
こういう楽しみもあるか pic.twitter.com/o7QKGps3Ne
— HomeMadeGarbage (@H0meMadeGarbage) January 11, 2025
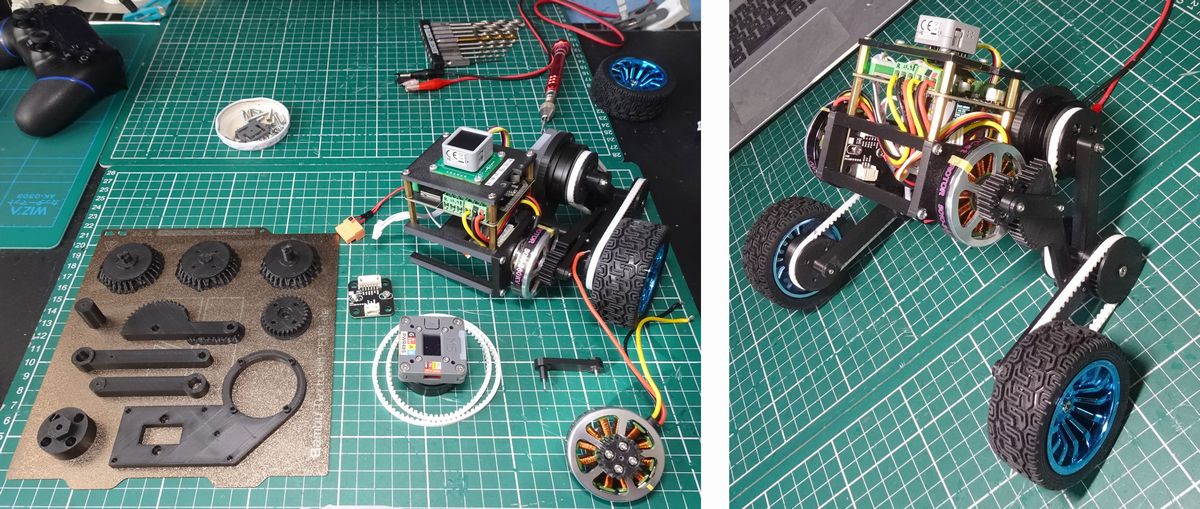
ロボット製作
タイミングベルトが活用できそうなので、ホイール駆動用 Roller485 Lite を胴体部に移動したロボットを製作します。
屈伸動作させる機構とタイミングベルトを融合した構成の為、ちょっと複雑になった。。
なんか複雑になってきて嫌な予感するけど
ビジュよき pic.twitter.com/JK8Wc02cfC— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2025
とりあえず片側に適応。
ああぁ pic.twitter.com/CkGRdEGITC
— HomeMadeGarbage (@H0meMadeGarbage) January 12, 2025
ちょっと関節用ブラシレスモータが苦しそうですね。。
両足にタイミングベルト機構を適応。
しかし、ベルトの回りが悪いのかうまく倒立できませんでした。。
ボールベアリング
関節用ブラシレスモータのトルクとタイミングベルトのよるホイール駆動の問題を切り分けて、まずはホイール駆動について検証を進めます。
関節用ブラシレスモータを除去して関節固定で倒立動作を確認しました。
ベルトや滑車がスムーズに動いとらん
直そう pic.twitter.com/e3n6CupgXp— HomeMadeGarbage (@H0meMadeGarbage) January 13, 2025
やはりホイールがうまく回転できずに倒立ができていません。
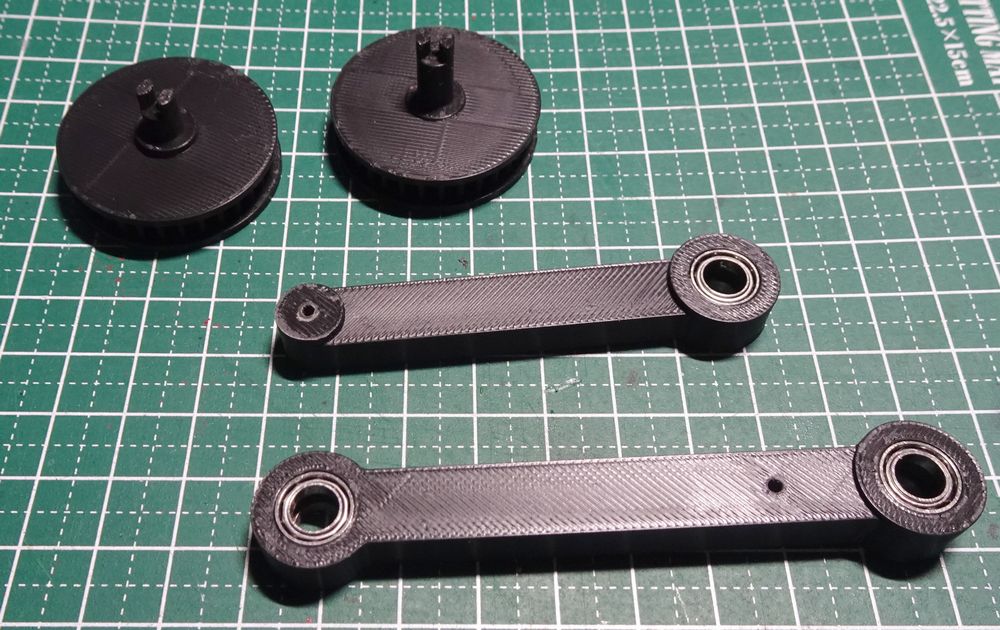
そこでホイールや滑車の回転部にボールベアリングの導入を検討します。
以下ホイール接合部にボールベアリングを使用した際のこれまでとの比較です。
ボールベアリング素晴らしいやん pic.twitter.com/7jZkYDjtoI
— HomeMadeGarbage (@H0meMadeGarbage) January 13, 2025
回転がスムーズで比較になりません。すげーや!
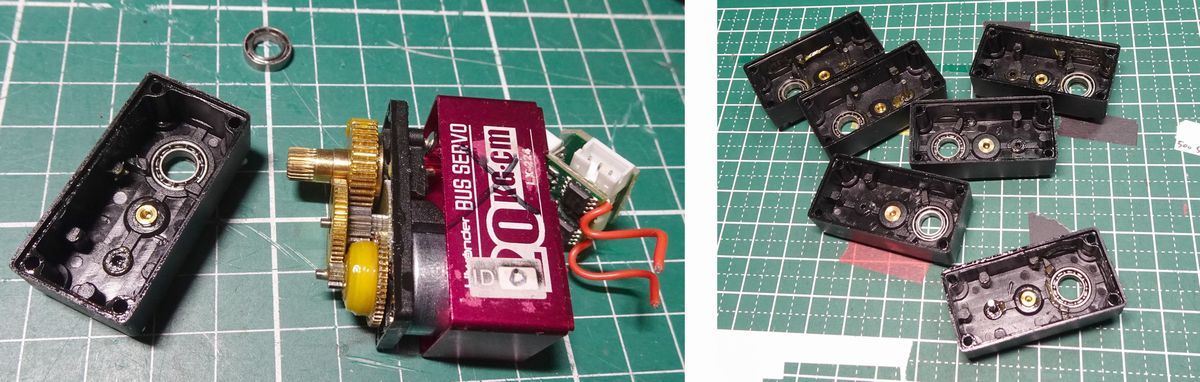
ボールベアリングは壊れたサーボモータ (LX-224、RDS3115) から摘出したものを再利用しました。
外径10mm 内径6mm 厚さ2.5mm
とりあえず左足にボールベアリング適応
左足だけベルトの滑車にボールベアリング仕込んだら立った
採用! pic.twitter.com/qzKKDHUQ0Q
— HomeMadeGarbage (@H0meMadeGarbage) January 13, 2025
ホイールがスムーズに回転しだして倒立動作が実現できました!
両足にボールベアリング適応!!
なによりデザインがいい pic.twitter.com/Az9Sgpb6Es
— HomeMadeGarbage (@H0meMadeGarbage) January 13, 2025
関節用ブラシレスモータを搭載していないため機体バランスが悪くフラフラですが、倒立動作は問題なくできるようになりました。
おわりに
ここでは屈伸型倒立振子の高いジャンプ動作を目指して、駆動部品を全て胴体に移動して足を軽くするべく、タイミングベルトとボールベアリングの検証を実施しました。
検証はおおむねうまくいきましたので、次回は関節用ブラシレスモータのトルクの確認を実施して高いジャンプ動作を目指します。
それではまた次回お会いいたしましょう。