ブラシレスモータでサーボ3 - タイミングベルト・遊星ギア –
本記事にはアフィリエイト広告が含まれます。
ブラシレスモータによるサーボ動作を楽しんでおります。
今回も色々試しましたので報告いたします。

目次
憧れ
これまでシリアルサーボでバク転動作を楽しんできたのですが。。。
私の4脚ロボット バク転集#quadrupedrobot pic.twitter.com/Ml4HqDhCYM
— HomeMadeGarbage (@H0meMadeGarbage) December 24, 2024
そろそろ限界が見えてきたということで本ブラシレスモータ検討が始まったわけです。
そこであらためてバク転 4足歩行ロボットの始祖であられるMITの Mini Cheetah の駆動アクチュエータに着目します。
膝の駆動は付け根に配置されたモータでベルトで遠隔駆動しているようです。
高そうなアクチュエータ。。。型番は不明
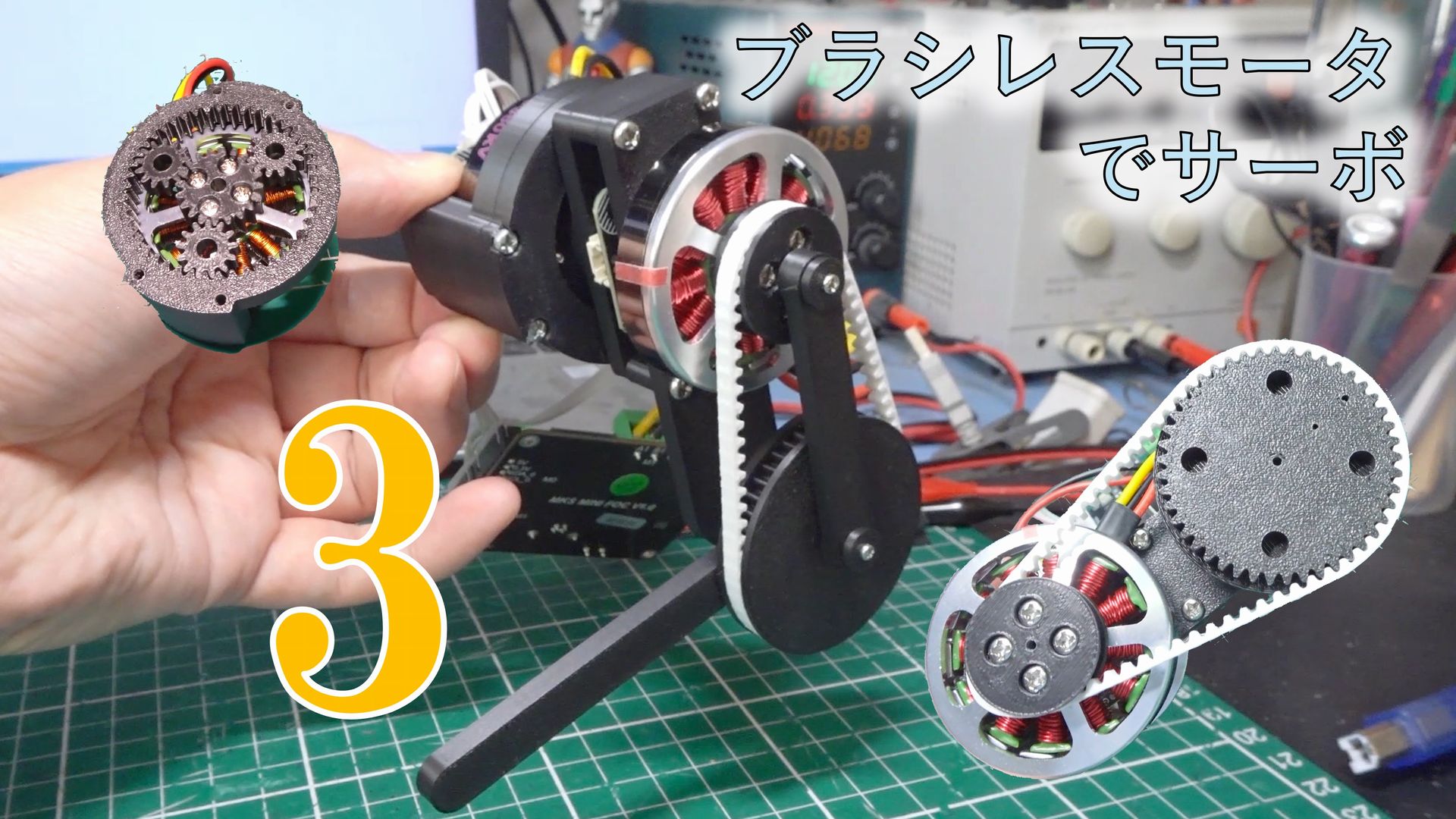
タイミングベルト
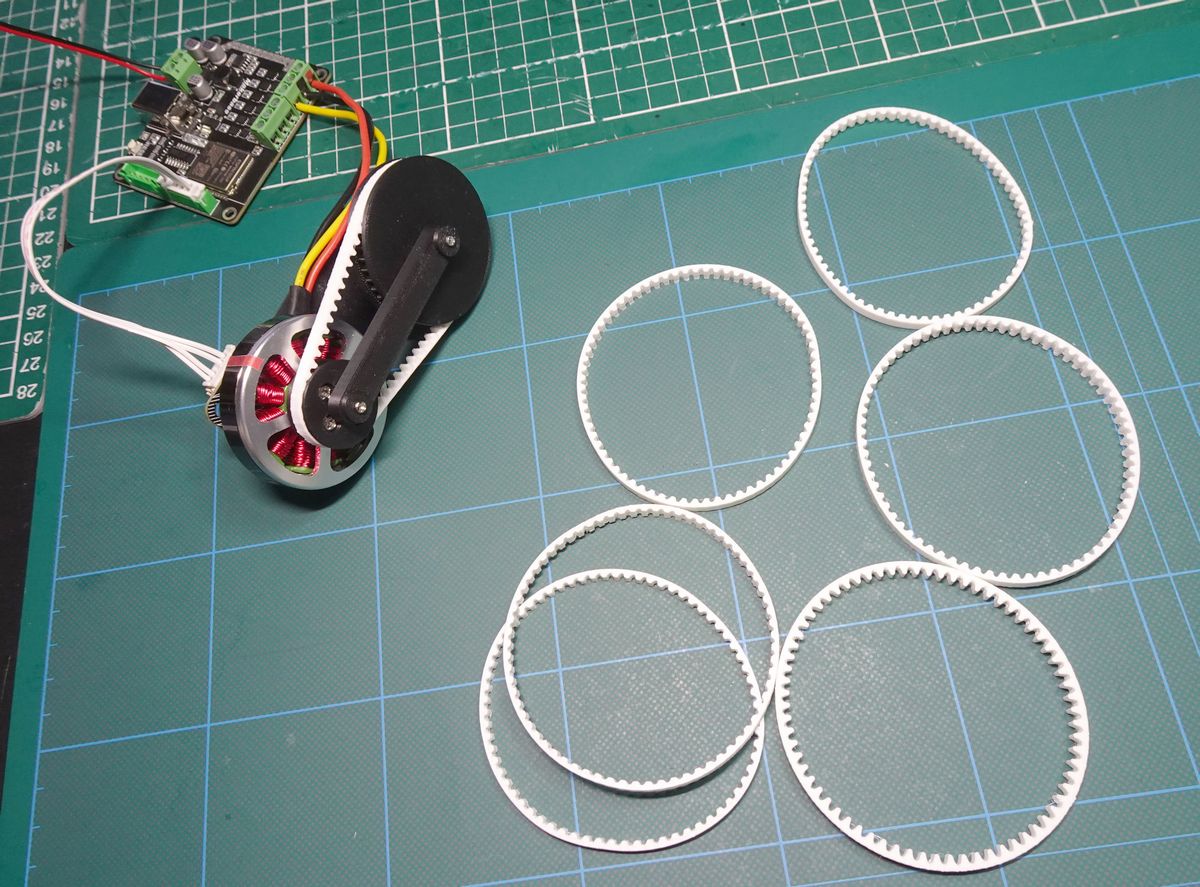
ということで手持ちのモータでタイミングベルト動作を試したくなりTPUフィラメントで作ってみました。
タイミングベルトというのを印刷してみた
これいいわ なんでもできるじゃん pic.twitter.com/br6rdF0onL— HomeMadeGarbage (@H0meMadeGarbage) December 23, 2024
結構イケるの。驚いた。いやガチのタイミングベルトを扱ったことはないのだが。
ギア比で減速しているので (21:45)、トルクの向上も感じられました。
歯車は最初からFusion360に搭載されているアドイン SpurGear で設計を楽しんできましたが、内側歯が生成できなかったのでアドイン GF Gear Generator を導入してタイミングベルト を生成し3Dプリントしました。
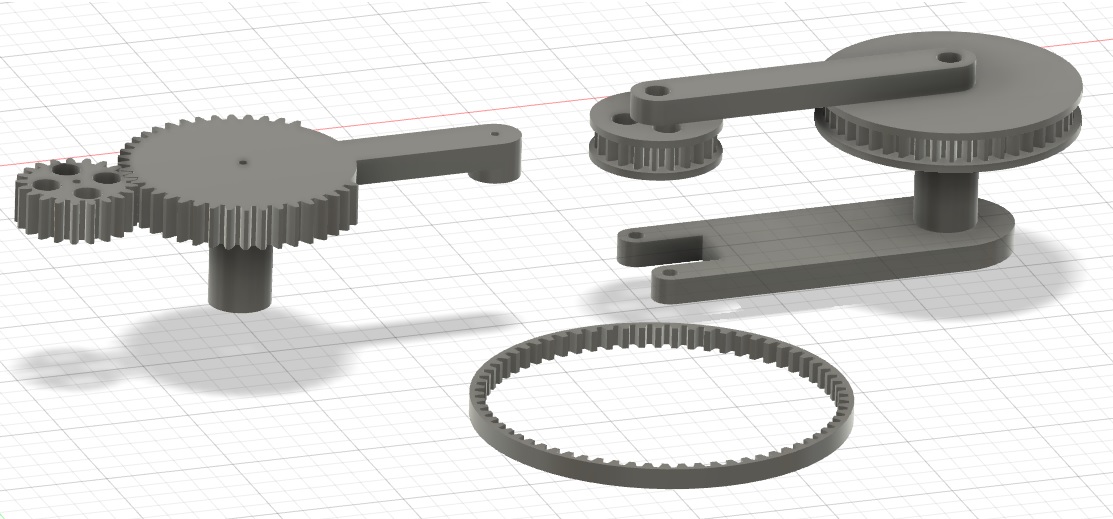
タイミングベルトを3Dプリントできるとなると、長さや形状の微調整が気軽にできるので可能性が大きく広がります。
足構築
タイミングベルト駆動がうまくいったので気を良くして2軸の足を製作してみました。
ブラシレスモータで2軸を味見 pic.twitter.com/4J7saMewUR
— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2024
付け根のモータはダイレクト駆動としたため、やはりトルクが足りない。。
ちなみにブラシレスモータは以下を使用しています。

Mini Cheetah のアクチュエータは内部にギアを仕込んで減速してトルクを稼いでいるようです。
遊星ギア
ということでブラシレスモータにギアを仕込んでトルク向上を目指したいと思います。
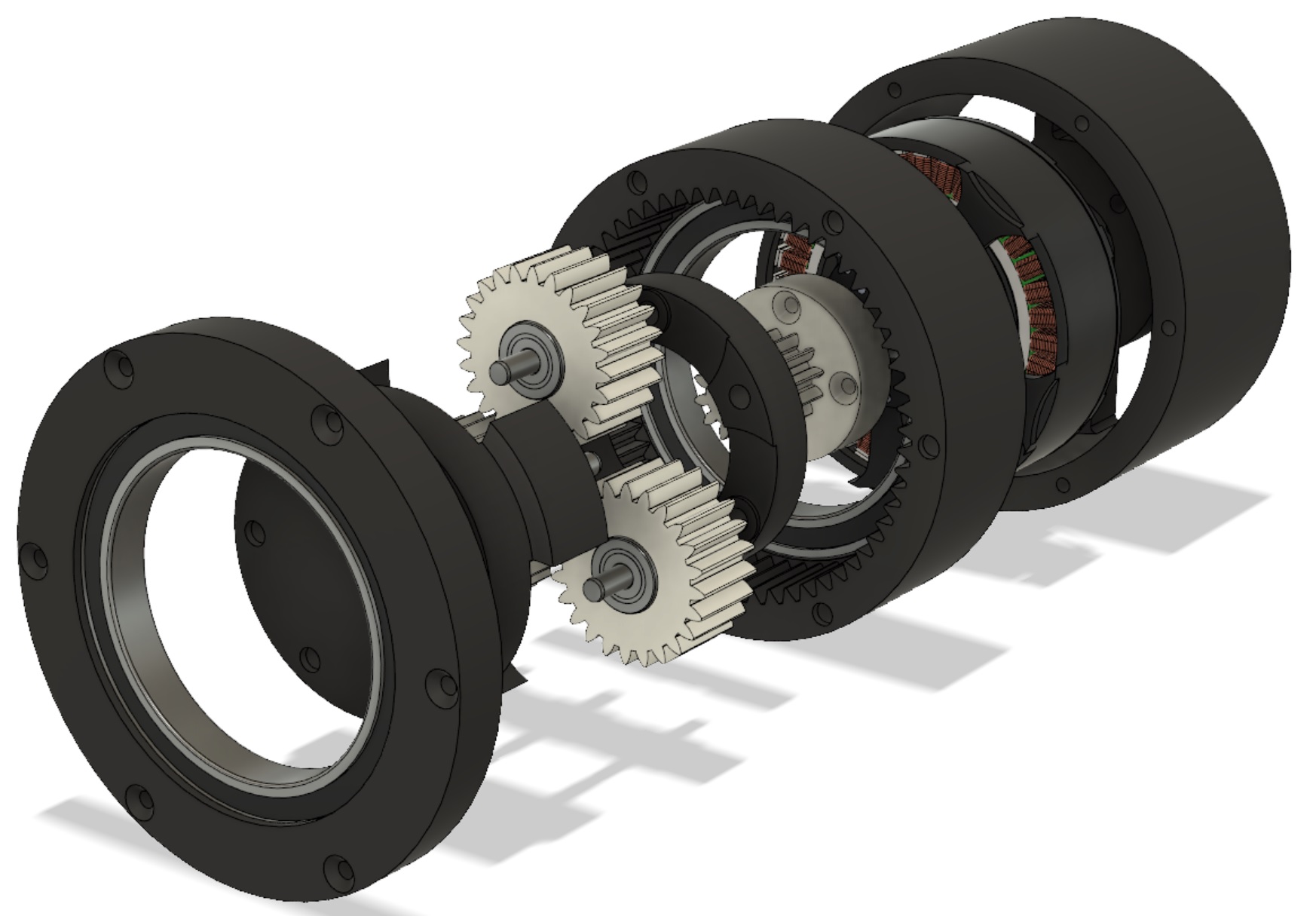
遊星ギアなるものを3Dプリントしてみました。
すごく楽しい♪
うわぁ 栄養価高い pic.twitter.com/HVP1Hz6Aux
— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2024
モータに仕込んでもいい感じにまわっています。
遊星ギアを3Dプリント pic.twitter.com/K0OqKB2m7p
— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2024
外装パーツも設計・プリントしてアクチュエータとしました。
アクチュエータを自作 pic.twitter.com/gN1bzUI1gj
— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2024
製作したアクチュエータを付け根用として足にしてみました。
力強くなった pic.twitter.com/w64Q4kTWRm
— HomeMadeGarbage (@H0meMadeGarbage) December 27, 2024
動画では伝わりにくいですがトルクはかなり向上しました。
遊星ギアの減速比の算出がわからなったのでAIに尋ねましたww

ここではリングギアを46、中心の太陽ギアを20で遊星ギアを製作したので減速比は3.3となります。
トルクも3.3倍になったということです。
ギアでトルクが増しましたが、応答も非常によくゆくゆくはこれでロボットなんかも楽しみたいです。
応答も悪くない
膝サーボも遊星ギアの方がいいかな世の4足歩行ロボットが結局 Mini Cheetah の構成に落ち着く理由を体でもろに実感 pic.twitter.com/aMhnXjql39
— HomeMadeGarbage (@H0meMadeGarbage) December 28, 2024
こうなってくると膝のモータも遊星ギアでトルクを増したいと思ってしまいます。
結局 Mini Cheetah の構成に落ち着くようです。
おわりに
ここではタイミングベルトと遊星ギアを3Dプリントし動作を楽しみました。
それぞれのメリットを体全身で享受し、ギア比によるトルク向上を実感することができました。
ブラシレスモータ + ギアの方向性でロボット製作を本格開始したいと思います。
それではまた