
ブラシレスモータでサーボ10 - クローラーボット完成 –
本記事にはアフィリエイト広告が含まれます。
前回までにホイール駆動モータを含む部品を全て胴体に実装し足を軽くして、ブラシレスモータ関節駆動による倒立振子の高いジャンプ動作を確認しました。
ここでは倒立振子の仕上げに入りたいと思います。
涙の最終回です。

目次
キャタピラ
倒立振子の仕上げに取り組もうと思ったのですが、ふと足先をキャタピラにしたらどうだろうと思い立ちやってみました。
思いつきでやってみたけど なんかイケた
なんだかカッコいいからこの方向で調整してみるか pic.twitter.com/ucZMrVCzDo
— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2025
ちょっとキャタピラがゆるゆるでフラフラしてますが意外とイケてるわww
↓ちなみに履帯はコチラを使用
補助滑車を追加してキャタピラのゆるみを低減したところ倒立が安定しました。
キャタピラ調整
いい感じだね。カッコいいよ
あとは過電流保護実装してバッテリ駆動にして
ガチ パラメータ調整で完成かな。 pic.twitter.com/iwsNxz0SBF— HomeMadeGarbage (@H0meMadeGarbage) January 16, 2025
ここではさらにRoller485に付けた滑車と足の付け根にもボールベアリングを導入しました。
キャタピラでの動作がうまくいきそうで独創的で面白いのでこの構成で仕上げようと決心しました。
仕上げ
完成に向けて製作を進めます!
補助タイヤ追加
前面に補助タイヤを追加して、前後どちらに転んでも起き上がり倒立できるようにしました。
前方に小タイヤ追加 pic.twitter.com/uvywZUdwsX
— HomeMadeGarbage (@H0meMadeGarbage) January 17, 2025
タイヤは家にあったミニ四駆のジャンクです。
バッテリ駆動
これまで安定化電源で給電していましたが、LiPoバッテリに変更してコードレス化しました。
バッテリ化に際してブラシレスモータ駆動基板 MKS MINI FOC の電流センサを利用して過電流保護機能も追加しました。
SimpleFOC の getDCCurrent() 関数で電流取得して、制限値以上で
motor.disable() で駆動停止させています。
完成
もろもろパラメータ調整して遂に完成!!
ブラシレスモータのスピードとギアの減速によるパワーによって、ええ感じに飛ぶことも出来ています。
ブラシレスモータサーボの習作として この結果を得たことは喜びです pic.twitter.com/P0zU3qGkfI
— HomeMadeGarbage (@H0meMadeGarbage) January 17, 2025
Jump Robot DnB pic.twitter.com/6p1beDJ8dy
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2025
構成
最後に本クローラー倒立ボットの構成を載せておきます。
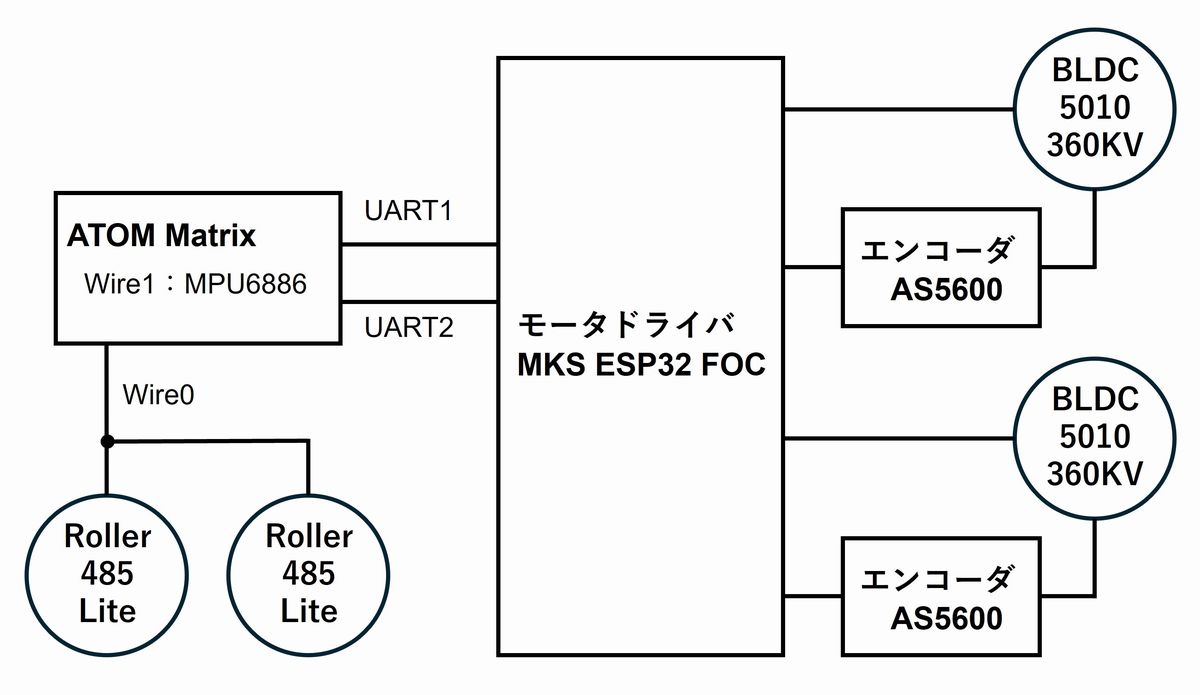
UART1/2で左右のブラシレスモータを独立で角度指定できるようにしています。
余剰のI_0, I_1ピンを使用しています。
・ATOM Matrix
・Roller485 Lite

・ブラシレスモータ 5010 360KV

・エンコーダAS5600
・デュアルモータドライバ基板 MSK ESP32 FOC V1.0

おわりに
ブラシレスモータのよるサーボ動作検証の結果として こういったロボットが完成できてうれしい限りです。
本件を通じてブラシレスモータ駆動についてはもちろんのこと歯車やタイミングベルトの知見もたくさん得ました。
更にボールベアリングを活用し、そのご利益の大きさを知れたことも大きな収穫です。
今回の経験を活かしてさらに面白いものを作りたいと思っておりますので引き続き何卒宜しくお願い致します。
速度モード (2026/1/19 追記)
HomeMadeGarbage the GARAGE 2025
クローラー倒立ボット MorphCrawlerBot
ちょっと操作が難しい。。。
まだまだ改善の余地がございます#HMGG2025 #HMGG pic.twitter.com/5wJFPDxWWg— HomeMadeGarbage (@H0meMadeGarbage) October 4, 2025
操作が難しいうえにクローラモードと倒立モードのモード移行時に暴走してしまうこともあり
多くの反省がありました。
本クローラーボットは基本的にはRoller 485 Lite をトルク(電流)モードで動作させており、クローラモード時はさらに速度制御器を追加して動かしておりました。
2026年一発目は実に操作性の悪いコイツの改修から始めるとする pic.twitter.com/R22WhEl6ev
— HomeMadeGarbage (@H0meMadeGarbage) January 18, 2026
特にクローラモードの 動作がぎこちない。。
この間にBLDCの速度モードに関する知見が私の中に蓄えられており、実際に速度制御モードによる倒立振子の製作も数を重ねてきました。
そこでここではRoller 485 Lite を速度モードでの動作に変更して安定動作を測りました。
速度モード導入によってクローラモードの移動とモード間の移行がスムーズになりました。
倒立動作はベルトとキャタピラの遊びがどうしてもあるのでトルクモード時からの大きな改善はありませんでしたが。。
じっと静止ができない pic.twitter.com/B5pfvjIAVA
— HomeMadeGarbage (@H0meMadeGarbage) January 19, 2026
まぁこれなら操作しやすいでしょう。
こうなるとベルトやキャタピラの遊びが凄く気になる pic.twitter.com/b4zv8Q7e6J
— HomeMadeGarbage (@H0meMadeGarbage) January 19, 2026
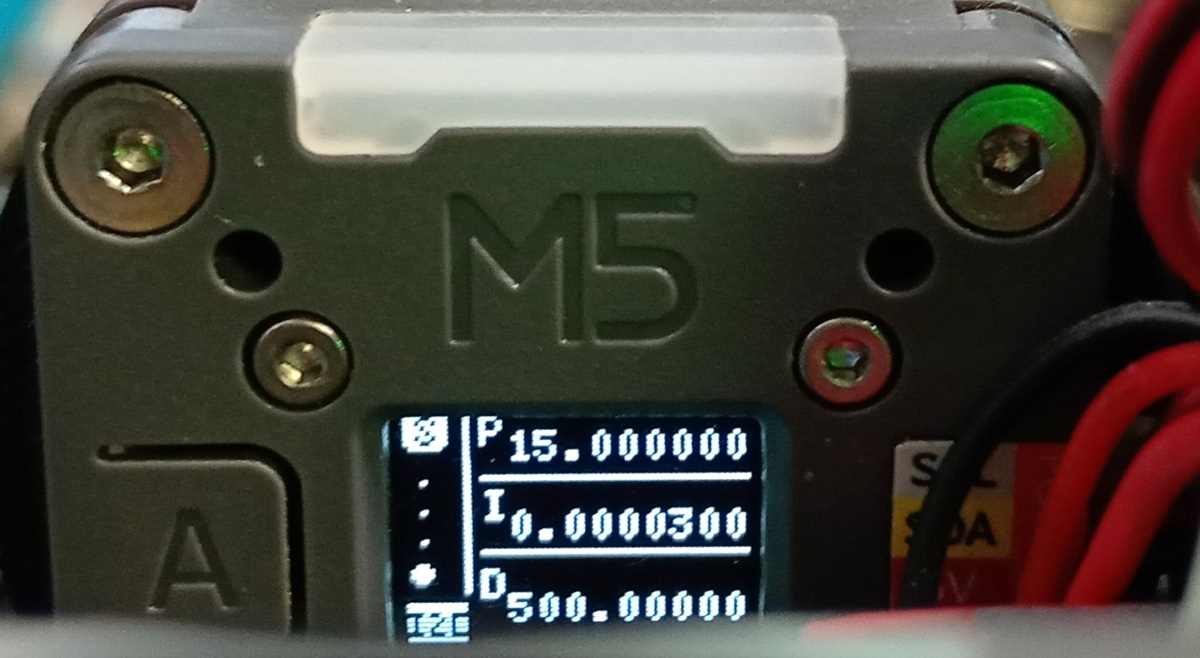
Roller 485 Lite 速度モード時のPID設定は以下のようにしました。






いつも勉強させていただいております。
新バージョンのMKSドライバではシリアルポートが追加になったようですね。
UART経由で角度指定をするにしても1回線で済みそうですが、2回線繋がれているのはどのように使用されているのでしょうか。
UART1のポートはUSB-Cに接続されてプログラムの書き込みをされる部分と思いますが改造されているということでしょうか。
ありがとうございます。
UART1/2で左右のブラシレスモータ独立に角度指定できるようにしています。
余剰のI_0, I_1ピンを使用しています。
本文にも追記しておきます。
書き込みは通常のUSB-Aコネクタ(UART0)で行っています。