ブラシレスモータでサーボ7 - 倒立振子ロボ作製3 –
本記事にはアフィリエイト広告が含まれます。
前回はブラシレスモータによるサーボで2脚倒立振子ロボットを完成させました!
ここではジャンプ動作でブラシレスモータサーボの応答性やトルクを体で感じたいと思います。

目次
ジャンプ動作
まずは片足を上げてみました。
ロボット pic.twitter.com/yDlIPSXtYD
— HomeMadeGarbage (@H0meMadeGarbage) January 8, 2025
機体を上げられておりトルク不足の問題は無いようです。
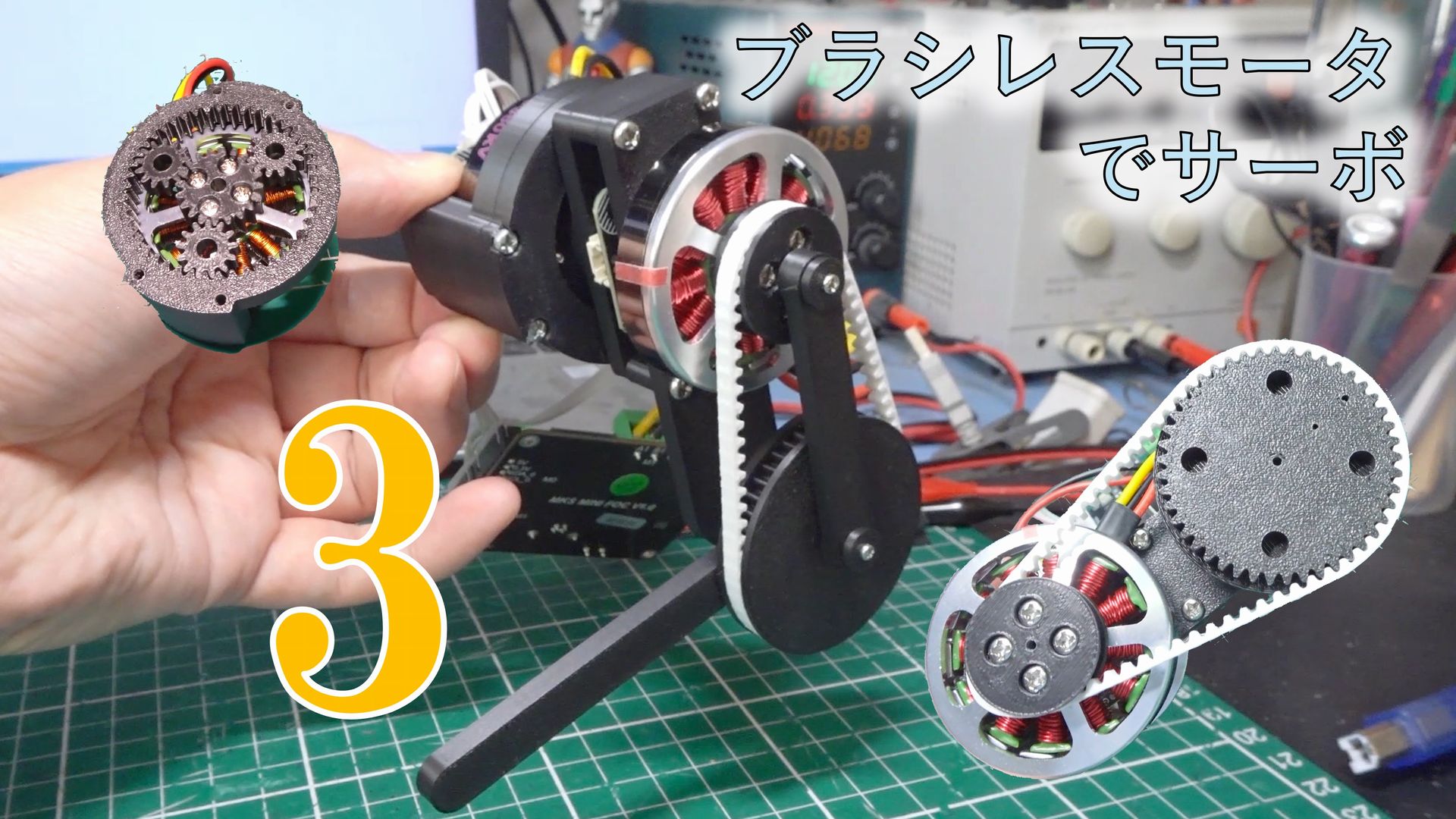
ギアの減速が効果的に効いているようです。
両足動作!
飛ばないねぇ pic.twitter.com/JdFFh6m04p
— HomeMadeGarbage (@H0meMadeGarbage) January 8, 2025
動体はもち上げれたけど、浮くほどではないですね。
足が重いね。。というか胴体が軽すぎか。
筐体再製作
若干 筐体の作りが貧相だったので、再設計。
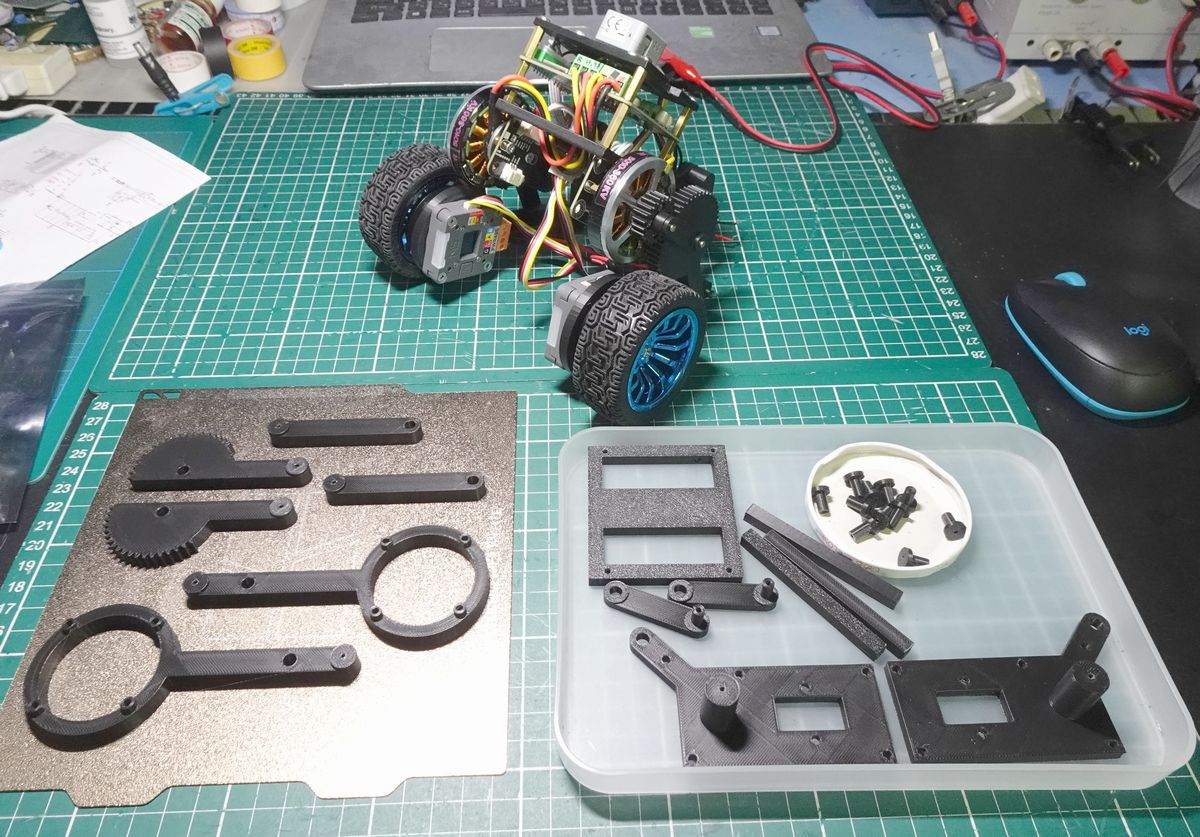
足を太くしたり、関節の接合部の遊びをタイトにしました。
ジャンプ動作2
新筐体でジャンプ動作確認
ジャンプ pic.twitter.com/rXvd4G4tdf
— HomeMadeGarbage (@H0meMadeGarbage) January 9, 2025
大した浮かないけど頑張って足上げとる。
SimpleFOC制御ループのPIDをできる限り調整してブラシレスモータの応答速度を上げてみました。
この構成ではこれが限界かな。。。
足が重いよねぇ。。
おわりに
ここではブラシレスモータサーボによる屈伸型倒立振子のジャンプ動作を確認しました。
ジャンプ動作によってギア減速によるご利益や応答性について明確に実感することができ、ブラシレスモータ+ギアでロボット動作に耐えうるサーボを自作できることがわかりました。
マジでいろいろ応用できそうです。
当初の目的であるブラシレスモータサーボがロボットの足として活用できるかの確認は今回で十分できたのですが、折角なのでもう少しジャンプ動作の検証を実施します。
足が重くてジャンプ高さが出なかったので足を軽くする方向で考えてみたいと思います。
それではまた