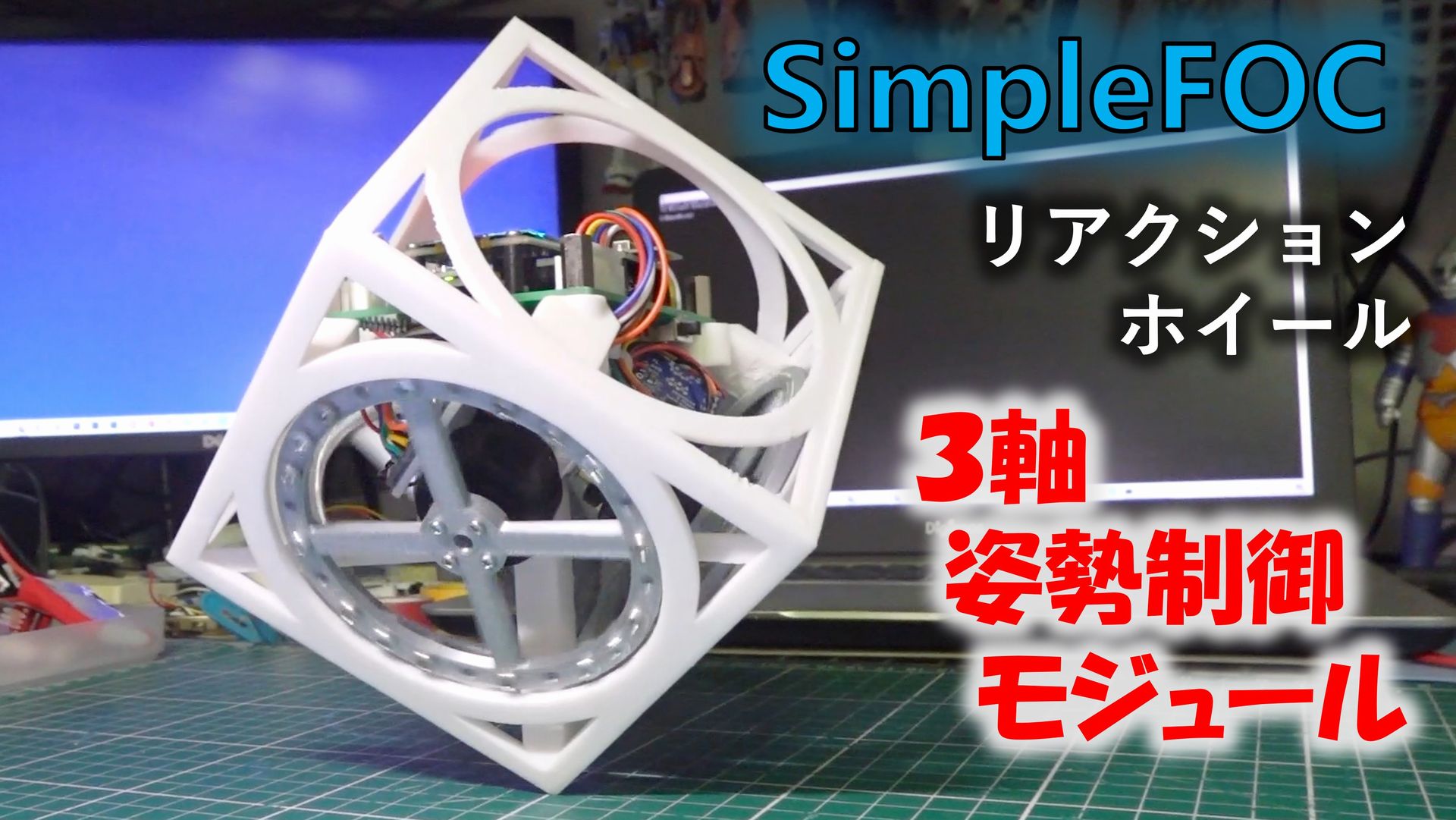
SimpleFOC で3軸姿勢制御モジュール
本記事にはアフィリエイト広告が含まれます。
前回までにSimpleFOCによるブラシレスモータの制御での1軸姿勢制御モジュールの製作・動作確認を実施しております。
ここではコレを発展させてホイール3軸での点倒立姿勢制御モジュールの製作を実施します。

目次
コントローラ
3軸姿勢制御モジュールのコントローラには以前作ったSHISEIGYO-3用の基板を使用します。
傾斜センサ
長年慣れ親しんだESP32D開発ボードがなくなっていたので
ESP32E開発ボードを採用特に変化なし pic.twitter.com/Nn15qBx8NP
— HomeMadeGarbage (@H0meMadeGarbage) September 30, 2024
OLEDディスプレイとIMUセンサMPU6050とESP32を搭載しています。
ESP32はこれまでESP32D開発ボードを使用していましたが、絶版になったようでESP32E開発ボードに切り換えました。
ピンコンパチで特に問題はありませんでした。
モータユニット化
ブラシレスモータとエンコーダとドライバをユニット化して姿勢制御モジュールに組み込みやすくします。
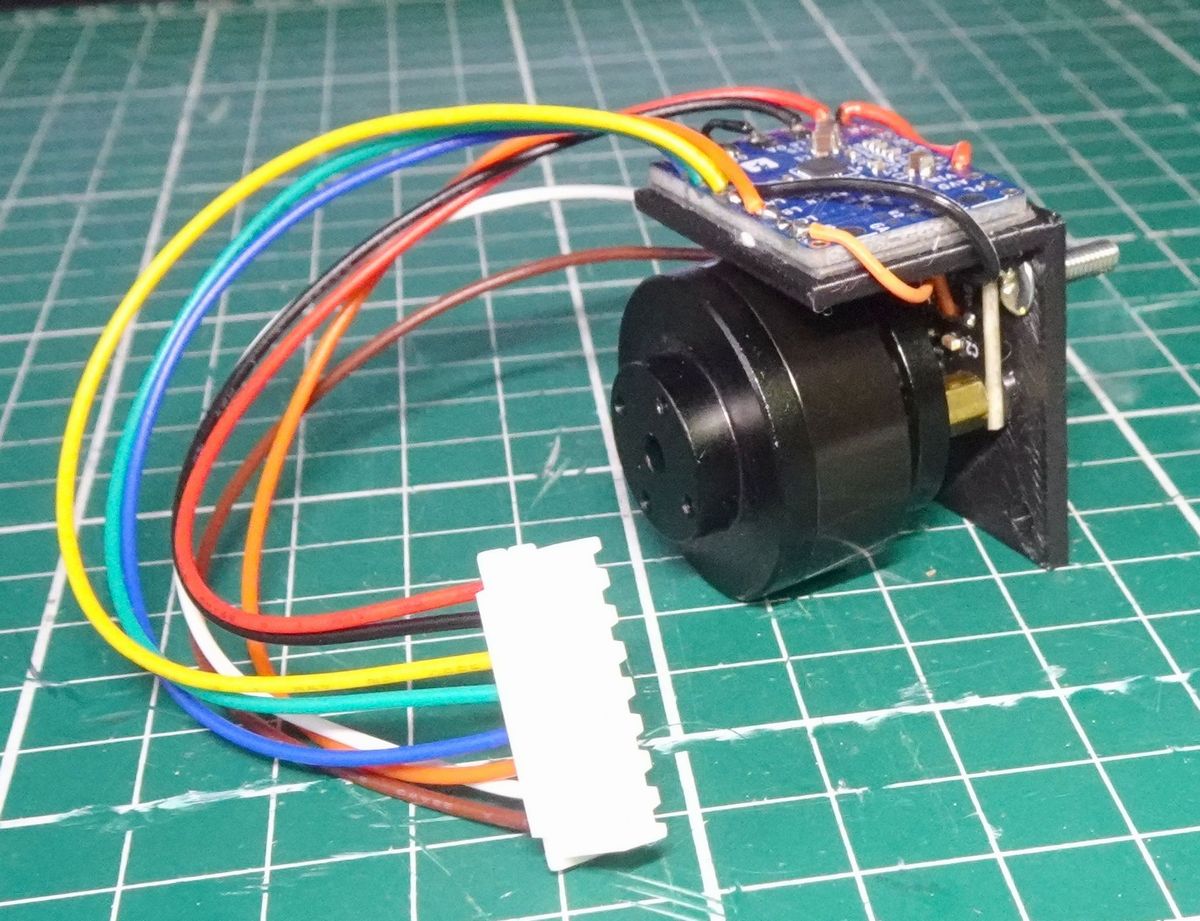
モータはカメラジンバル用小型ブラシレスモータ
エンコーダには磁気エンコーダAS5601モジュールを採用しました。
A/B相出力で回転を検知します。
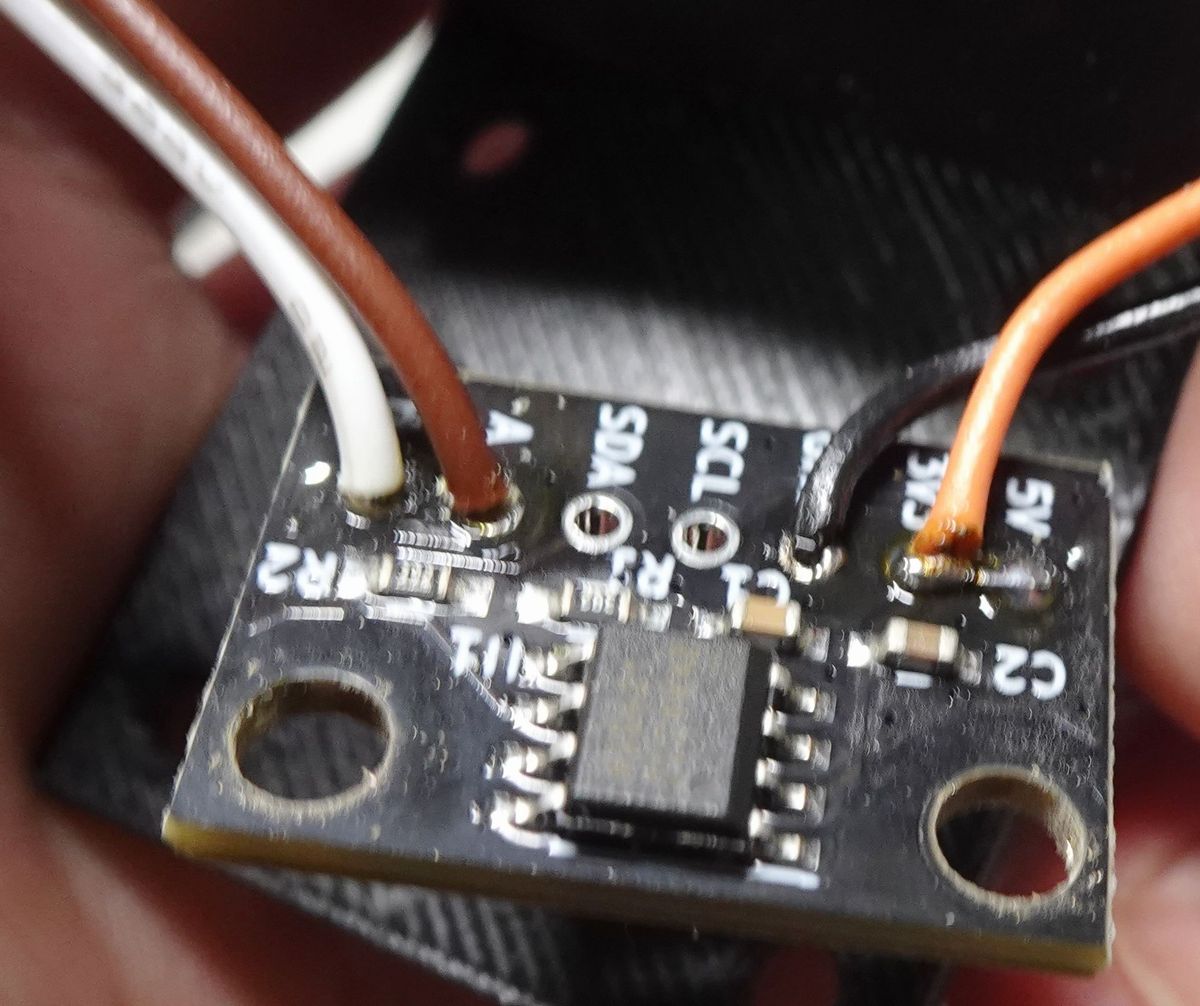
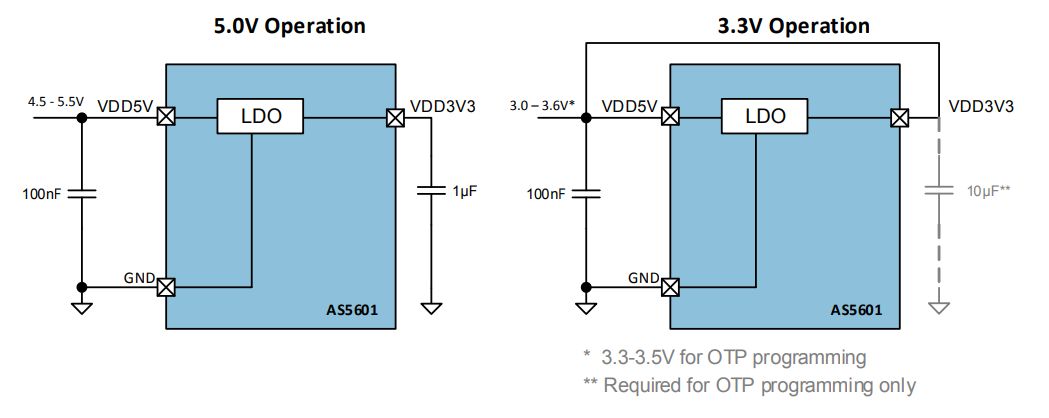
配線削減のために3.3V動作モードを採用しました。
モータとエンコーダは真鍮スペーサを介して接続
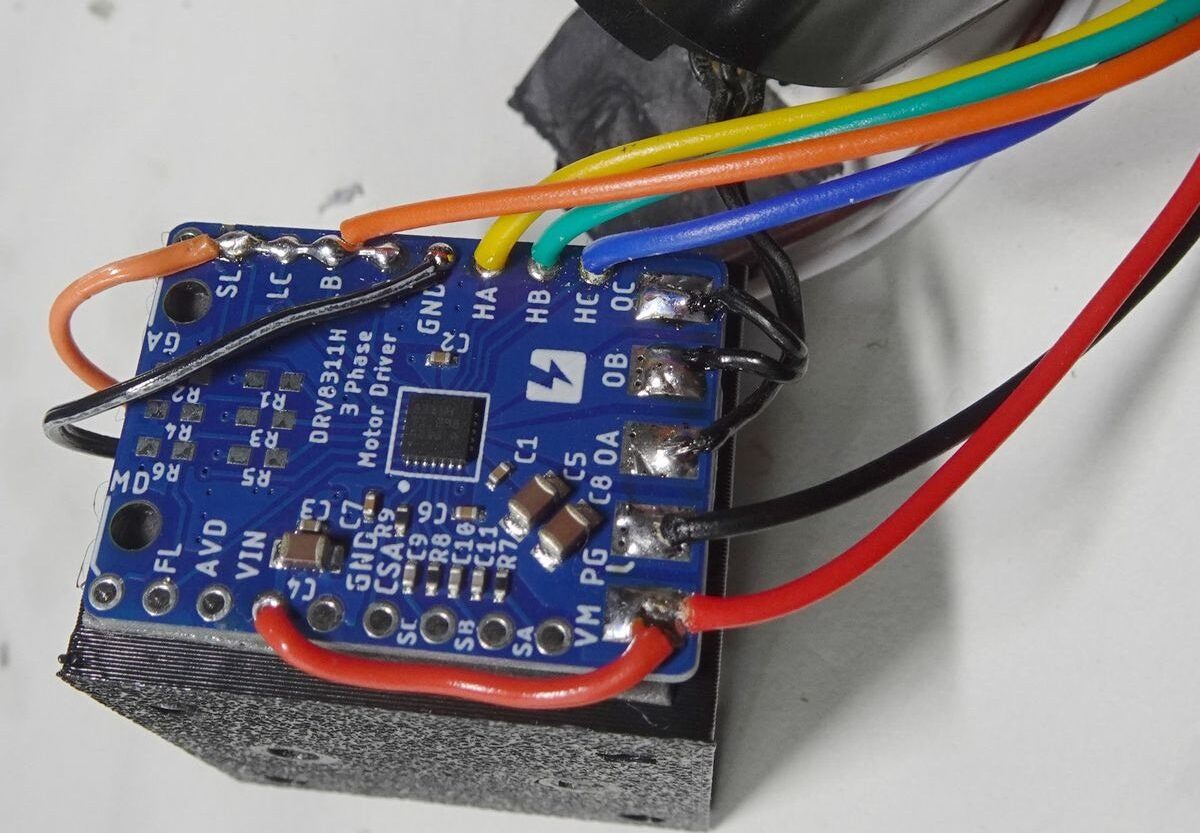
ドライバはDRV8311Hモジュールを使用
コントローラと製作したモータユニットで1軸辺倒立動作を確認しました。
ホイールのトルク足りてなくて少し苦しいが動作はおk pic.twitter.com/6BXguCyquS
— HomeMadeGarbage (@H0meMadeGarbage) October 2, 2024
3軸姿勢制御モジュール製作
コントローラとモータモジュールが用意できたので3軸姿勢制御モジュールの完成を目指します。
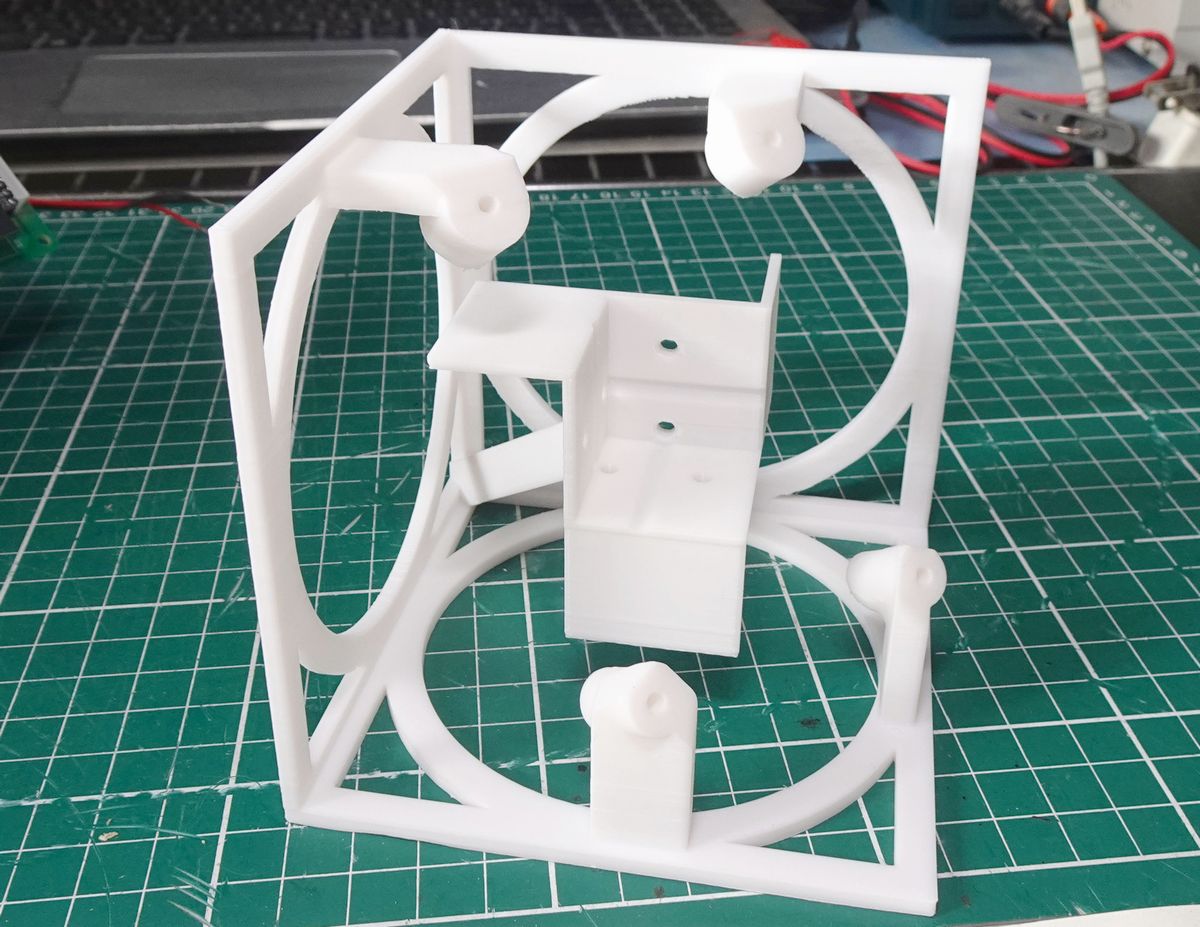
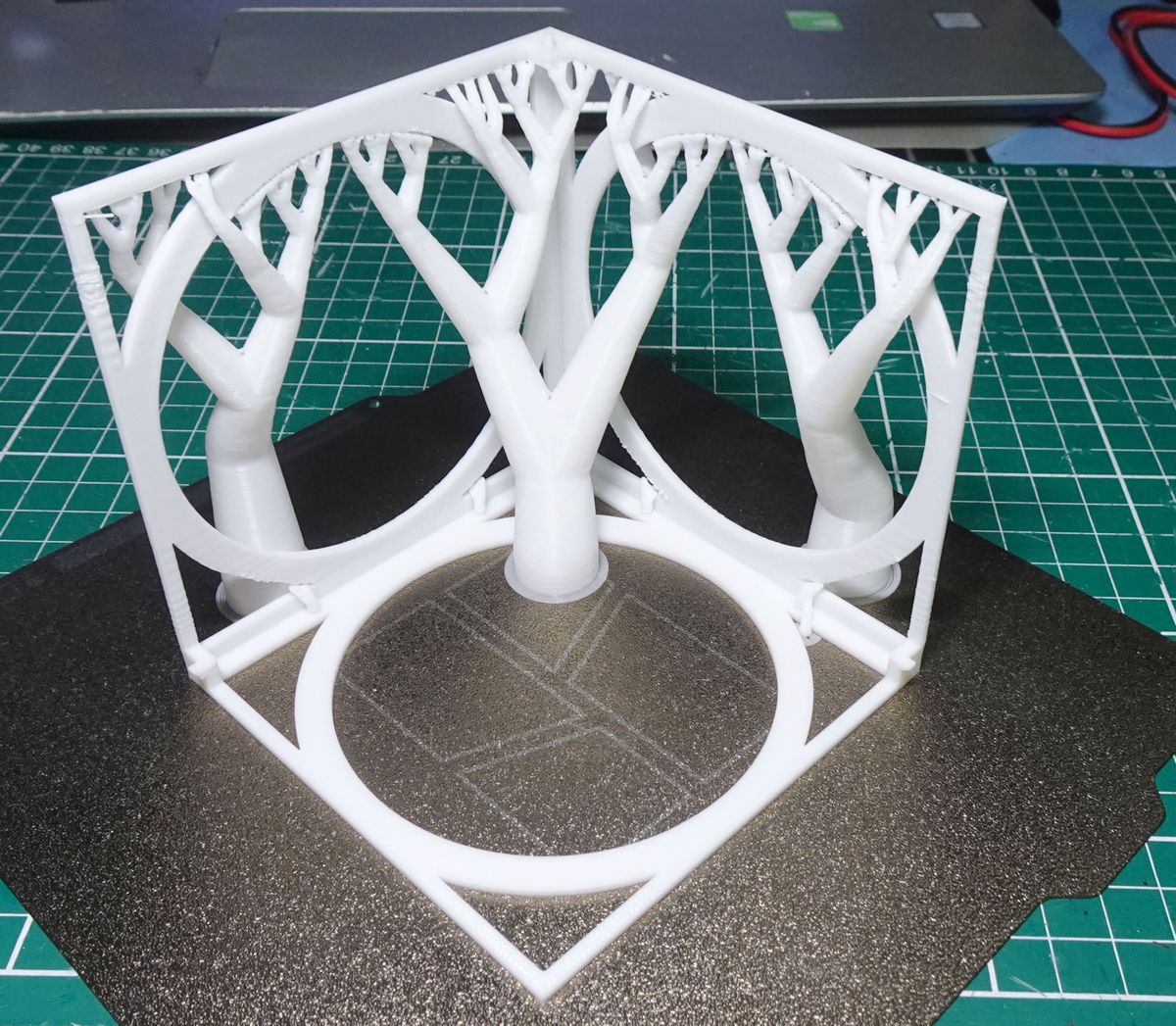
筐体設計
Fusion360で筐体を設計
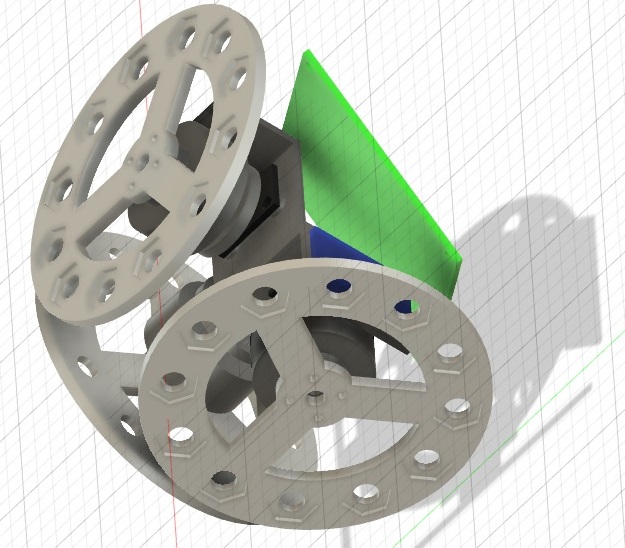
3Dプリント出力 サイズは10cm立方
辺倒立動作確認
ホイールも3Dプリントしてコントローラとモータユニットを搭載して新筐体で辺倒立動作を確認。
辺倒立 pic.twitter.com/ySeSrLRcgo
— HomeMadeGarbage (@H0meMadeGarbage) October 2, 2024
モータ追加
モータユニットを追加して3軸姿勢制御モジュールを目指します。
2ユニット追加作製
豊かな気持ちになる pic.twitter.com/1cCa5bkN1Q— HomeMadeGarbage (@H0meMadeGarbage) October 3, 2024
筐体に残り2個のモータユニット搭載
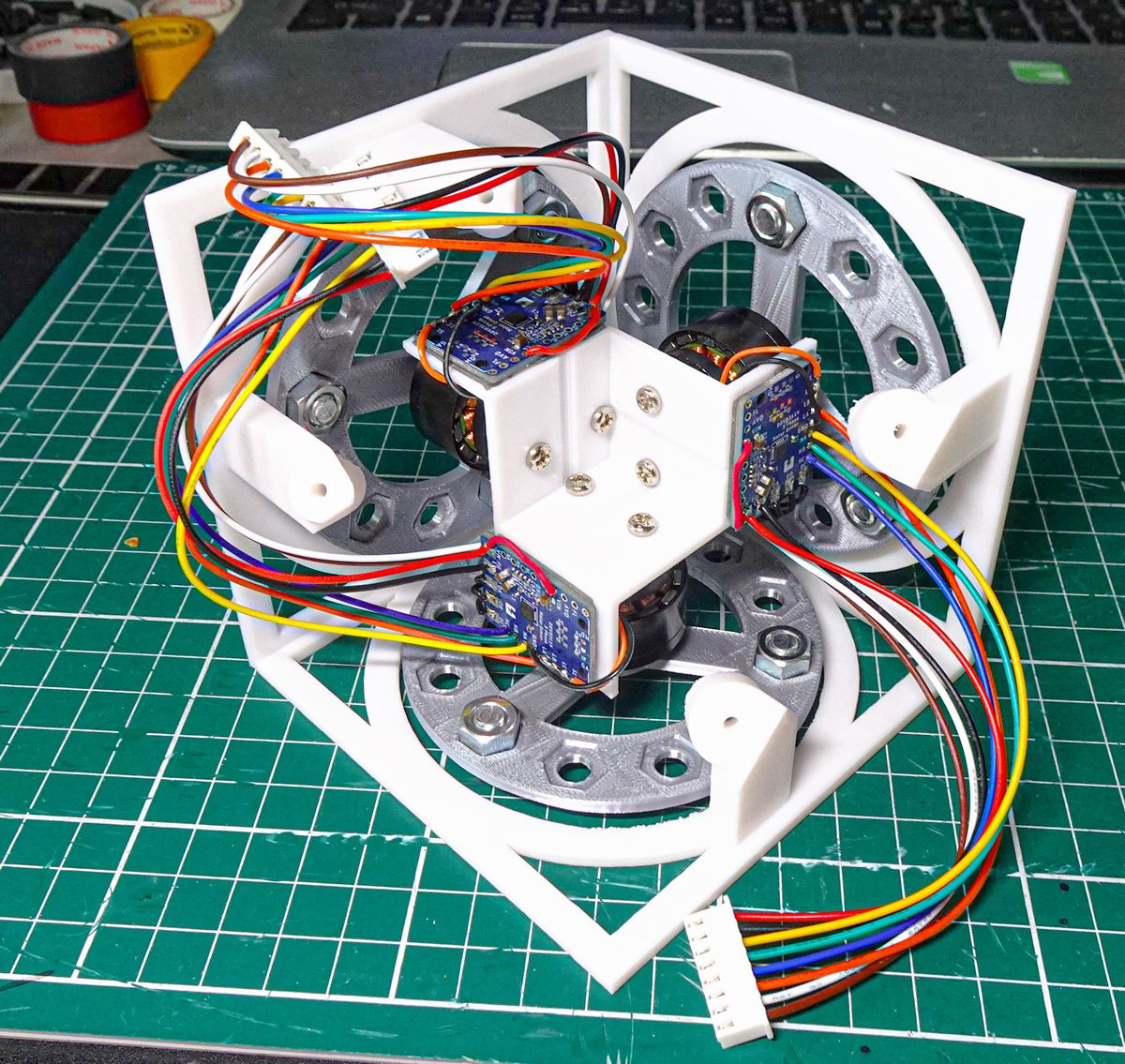
結線
コントローラと3つのモータユニットを接続して回転動作を確認しました。
配線完了 pic.twitter.com/MnRodAAnXv
— HomeMadeGarbage (@H0meMadeGarbage) October 3, 2024
点倒立
SimpleFOCでブラシレスモータを回転させて点倒立を目指します。
あーん 惜しい pic.twitter.com/ICWux7Zzji
— HomeMadeGarbage (@H0meMadeGarbage) October 3, 2024
モータスピード取得部にコード記述ミス発見。修正で動作改善しました。
無事にジンバル用ブラシレスモータで点倒立動作が実現できました!
改良
ここから改良を加えてより安定した点倒立動作を目指します。
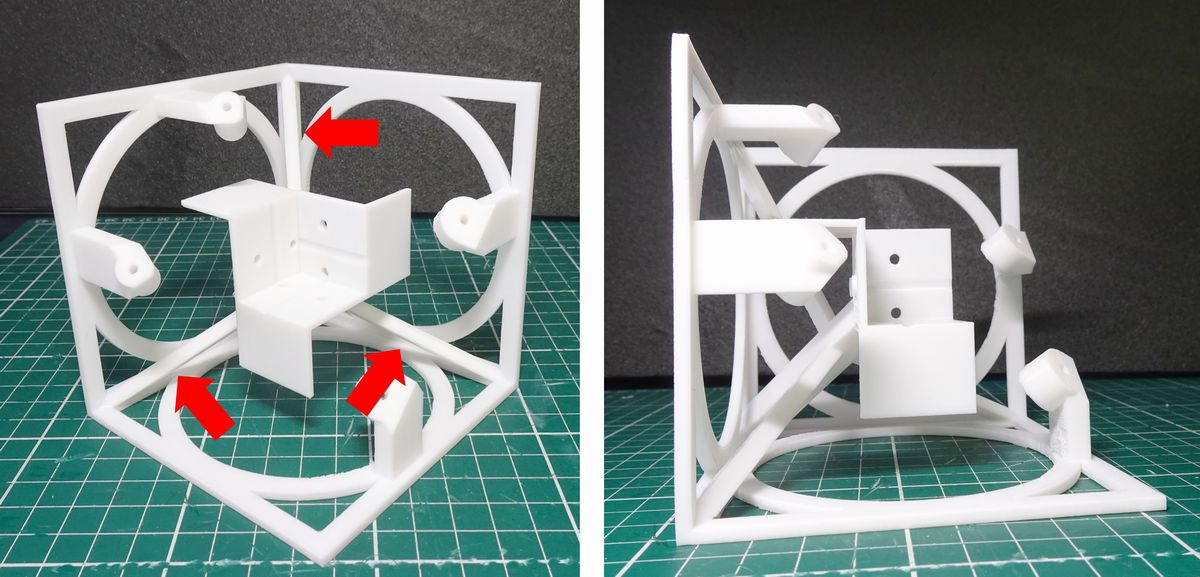
筐体強化
筐体内部のモータ固定部の強度が弱かったので支えを追加して3Dプリントしなおしました。
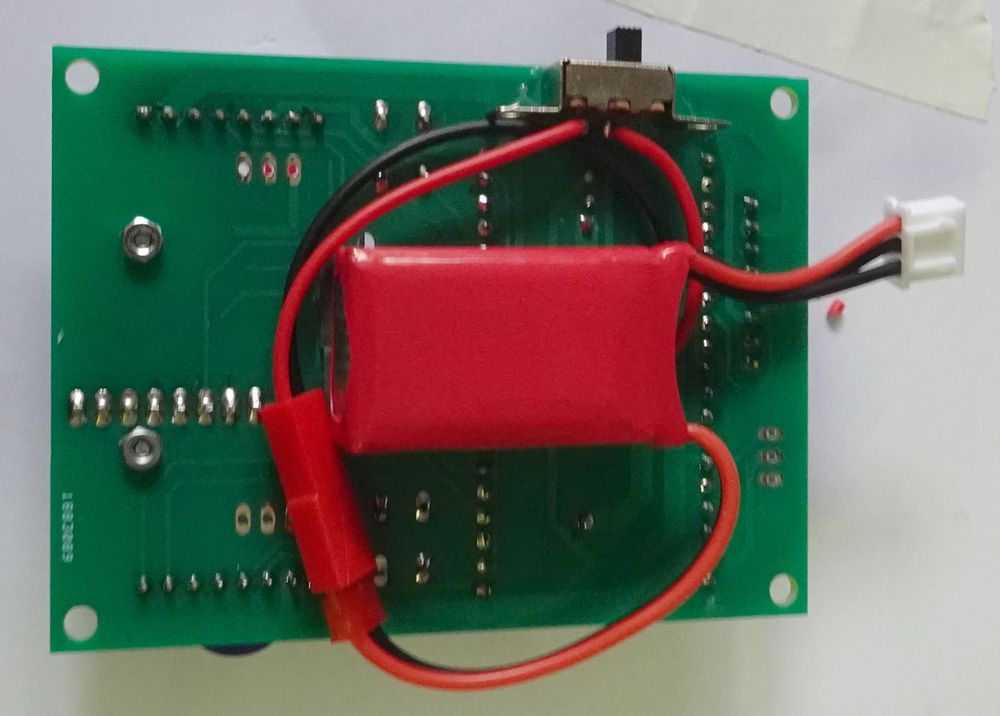
バッテリ駆動
2セルLiPoバッテリ駆動にしました。
点倒立
改良後動作確認
点倒立 pic.twitter.com/g2J7QvbqB2
— HomeMadeGarbage (@H0meMadeGarbage) October 4, 2024
バッテリ動作でも問題なく点倒立できました。
完成
上側の筐体も3Dプリントし、
フライホイールもプリントしなおして重りをM6ネジからM3ネジに変更してホイールトルクの均一化をはかりました。
完成#SimpleFOC #ReactionWheel #Cubli pic.twitter.com/BWhByhaxzm
— HomeMadeGarbage (@H0meMadeGarbage) October 4, 2024
おわりに
ここではSimpleFOCによるブラシレスモータの制御による3軸姿勢制御モジュールを製作しました。
SimpleFOCの利用によって今後さまざまなブラシレスモータで点倒立が楽しめそうです。
3軸姿勢制御モジュールいっぱい揃ってきた。
3重点倒立も目指したいので更なる安定化を図りたいと思います。
☟以前実施した2重点倒立




非常に有益な記事をありがとうございます。ブラシレスモーターと磁気エンコーダを初めて扱うのですが、モーターユニットの部分の概ねの設計を見せていただくことは可能でしょうか?磁石やエンコーダの良い配置方法がわからず、ぜひ参考にさせていただきたいです。
申し訳ございません。
コチラは設計情報をオープンにしておりません。
磁石とエンコーダの位置関係ですとコチラはいかがでしょうか
https://github.com/homemadegarbage/PWMservoEncoder
早速のご返信ありがとうございます!参考にさせていただきます。