SimpleFOC でリアクションホイール姿勢制御モジュール
本記事にはアフィリエイト広告が含まれます。
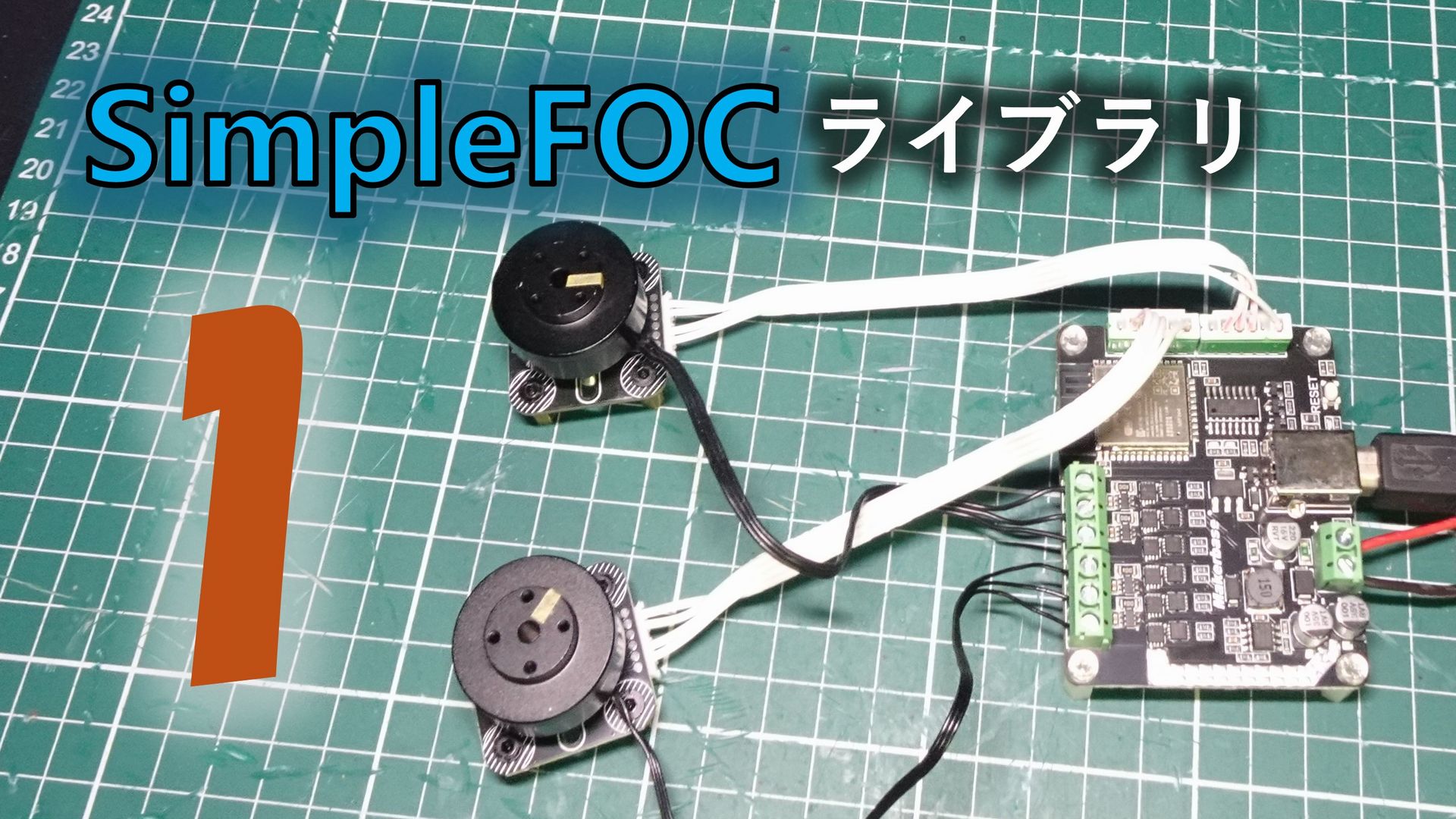
前回はSimpleFOCライブラリを用いてブラシレスモータを制御し倒立振子を製作しました。
ここではリアクションホイールによる姿勢制御モジュールを製作したので報告いたします。

目次
これまでの成果
リアクションホイールによる姿勢制御モジュールは以前に検討を実施しております。
倒立動作は確認済です。
SimpleFOC 姿勢制御モジュール できたわ
なんかトルク足りないなと思てたらコード内で指定してたカレントリミットに引っかかってた
ちゃんと調べて使わないとダメですね pic.twitter.com/Qz4y4u2YdC
— HomeMadeGarbage (@H0meMadeGarbage) September 19, 2024
ここでは姿勢制御モジュールを深掘りします。
コントローラ小型化
これまではMakerbase社のコントローラを使用してきました。

ESP32搭載でブラシレスモータを2個駆動できて素晴らしいのですが、今回はモータを一個しか動かさないのでコントローラの小型化を目指します。
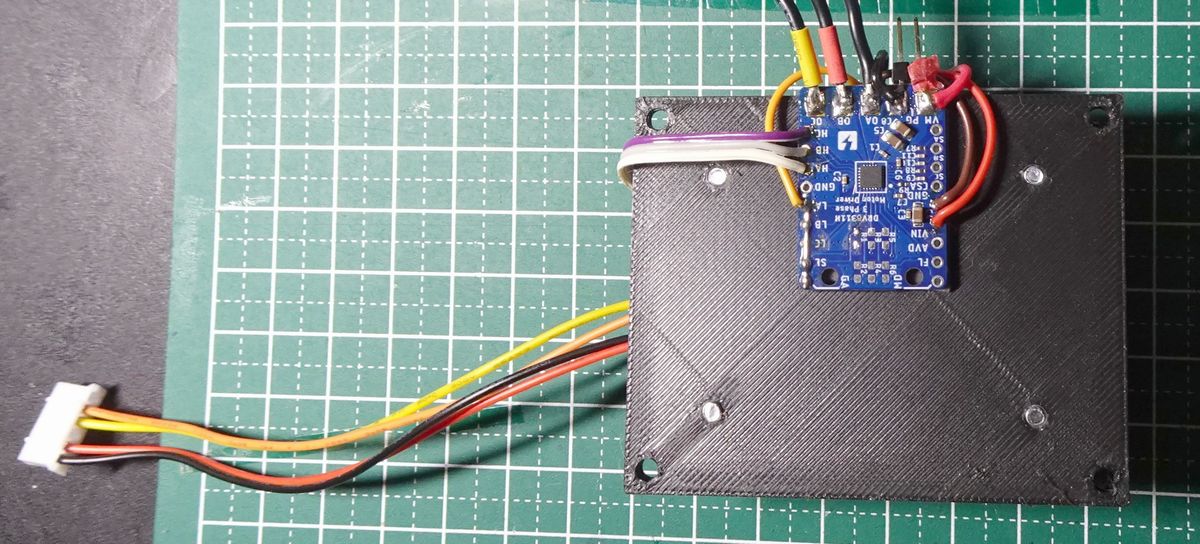
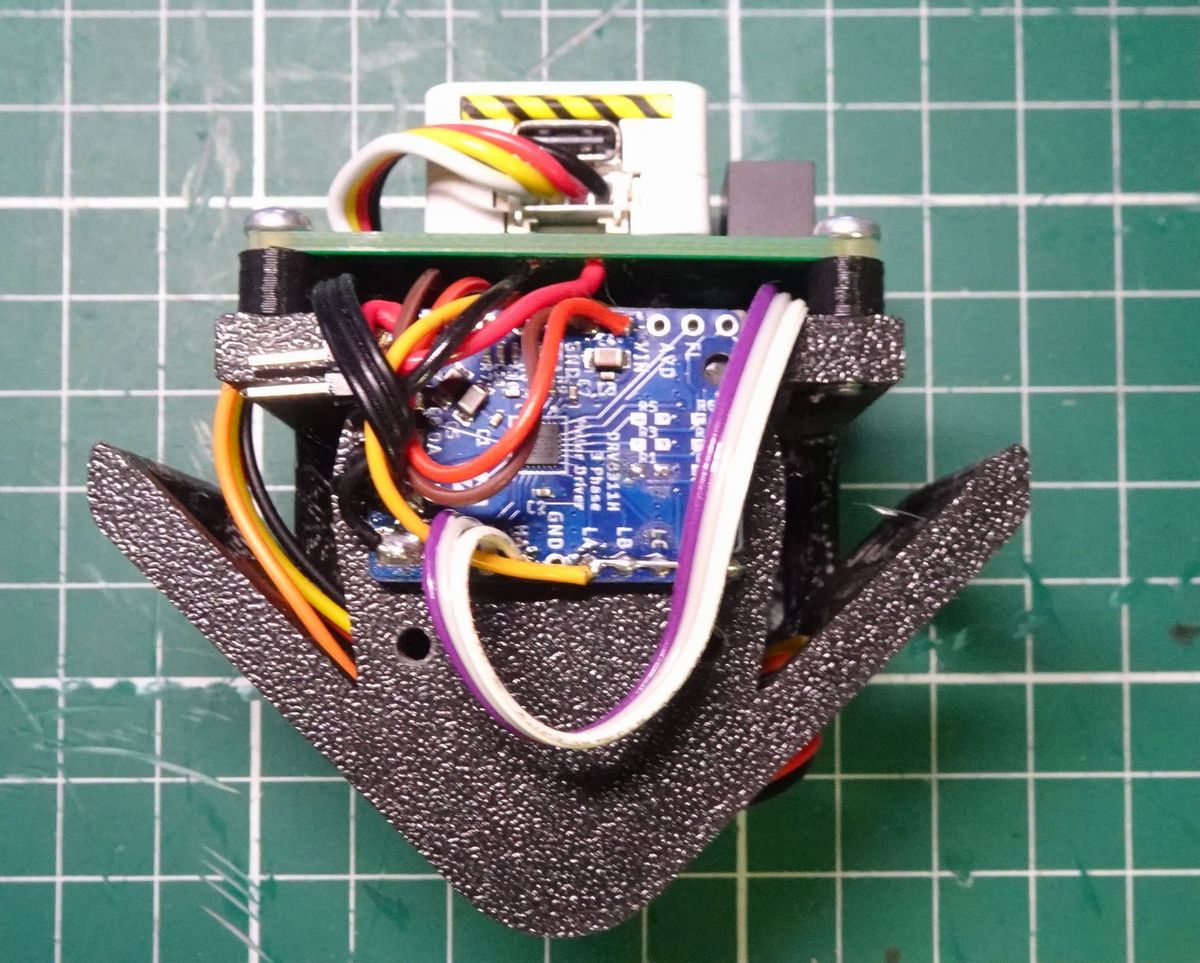
ドライバは1チップにプリドライバコントローラとパワトラを内蔵したDRV8311H搭載の以下を採用します。

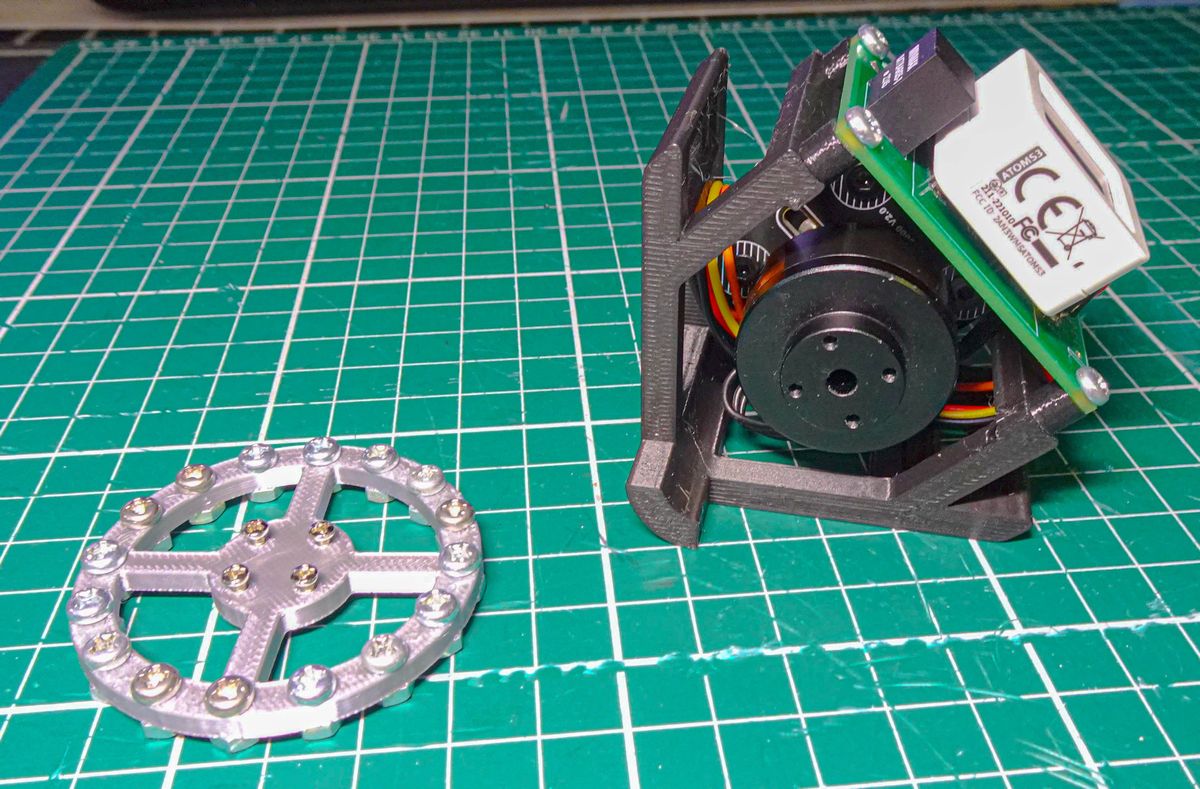
コントローラにはIMUセンサ(MPU6886)搭載のATOMS3を採用
エンコーダとモータはこれまでと同様に以下のモジュールのモータを載せ替えて使用します。

動作
新規構成でも倒立動作を確認できました。
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2024
起き上がり倒立
コントローラが小型化できましたので、姿勢制御モジュール自体も小さくして起き上がり倒立を目指します。
コントローラに合わせて機体を小型化。
構成は全く同じで当然無事に倒立
— HomeMadeGarbage (@H0meMadeGarbage) September 24, 2024
起上り動作
高速回転させたホイールを逆転させて機体を反転させます。
SimpleFOCをひっくり返す pic.twitter.com/Va2ZCydvW8
— HomeMadeGarbage (@H0meMadeGarbage) September 25, 2024
起上りやすくするために支点の角をR10mmで丸めています。
また転びにくくするために左右に羽を追加。
起上り倒立動作
起上って機体が直立体勢になった際にバランス動作させて倒立動作に移します。
無事にSimpleFOCによるブラシレスモータ制御で姿勢制御モジュールの起き上がり倒立まで確認できました。
— HomeMadeGarbage (@H0meMadeGarbage) September 25, 2024
おわりに
ここではSimpleFOCによるリアクションホイール姿勢制御モジュールの制御を楽しみました。
今回は外部電源を使用しましたが、バッテリ内蔵の検討も実施したいです。
また高トルクモータの検証も実施したいです。
更には3軸にも挑戦したいとも思っております。
それではまた