
リアクションホイールへの道
リアクションホイール倒立振子 SHISEIGYO-3 N1 使用法
3軸リアクションホイール倒立振子 SHISEIGYO-3 N1 の使用法を紹介させていただきます。 SHISEIGYO-3 N1 実機を以下で販売中です。是非ご検討ください。 https://shop.homemadegarbage.com/product/s-3-n1/ ...
電子工作 2026.5.18 お父ちゃん ![]()

リアクションホイール姿勢制御モジュール SHISEIGYO-3 N1 完成
前回は ID-529XW を3個使用したリアクションホイール姿勢制御モジュールを製作しました。 https://homemadegarbage.com/reactionwheel82 物理ブレーキなしでの自立動作を目指しましたが、不可能であることが分かりましたので、ここではブレー...
電子工作 2026.4.29 お父ちゃん ![]()

リアクションホイール姿勢制御モジュール SHISEIGYO-3 N1 (仮)
前回、前々回に引き続き AliExpressで在庫復活したブラシレスモータを鼻息荒くイジります。 ID-529XW (Short Model) :https://ja.aliexpress.com/item/1005011691218733.htm ID-529XWを1個使用...
電子工作 2026.4.9 お父ちゃん ![]()
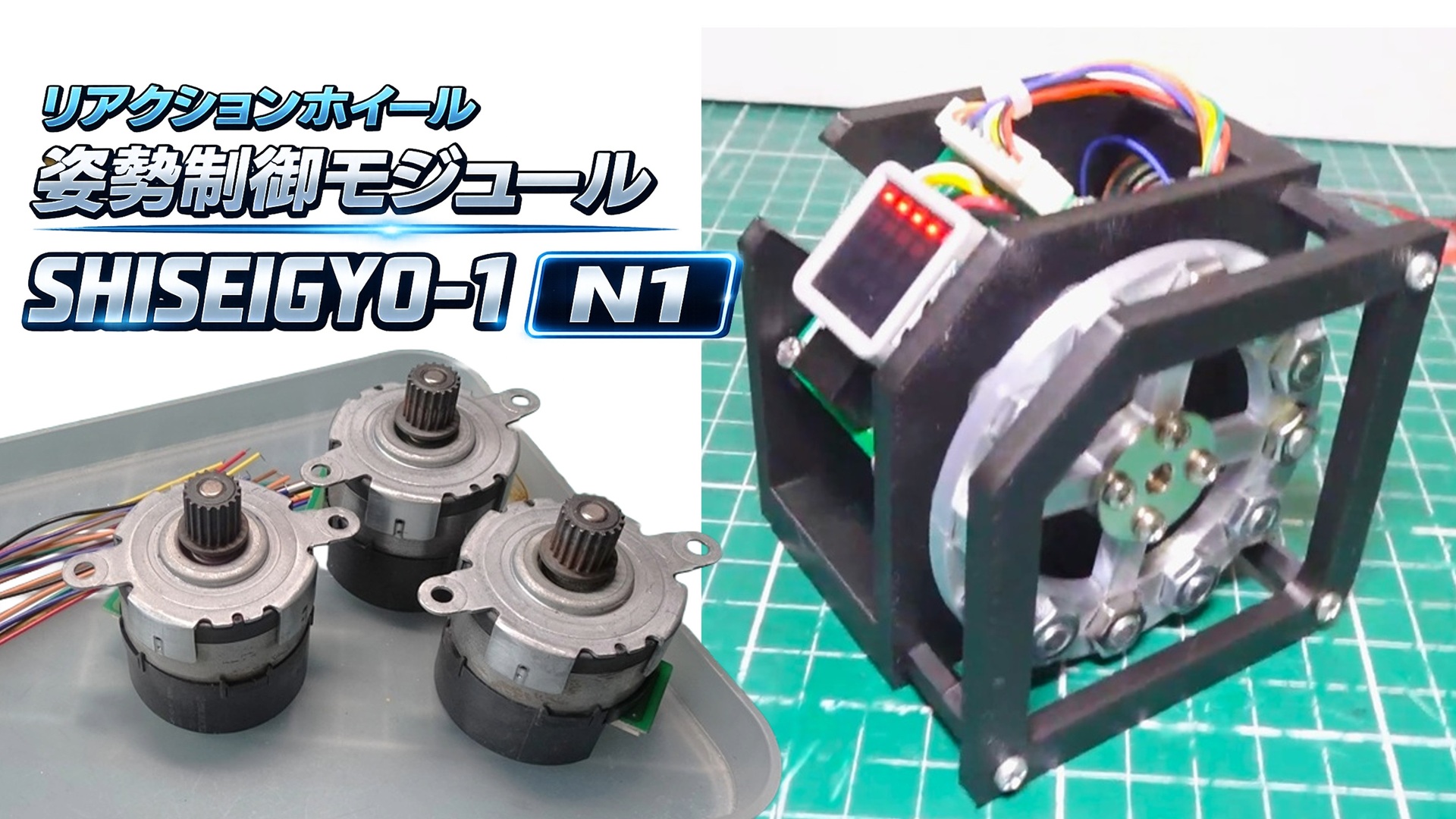
リアクションホイール姿勢制御モジュール SHISEIGYO-1 N1
しばらく在庫が切れていたブラシレスモータがAliExpressで復活していたので購入してみました。 ID-529XW (Short Model) :https://ja.aliexpress.com/item/1005011691218733.html このブラシレスモータであらためて1軸リ...
電子工作 2026.4.4 お父ちゃん ![]()
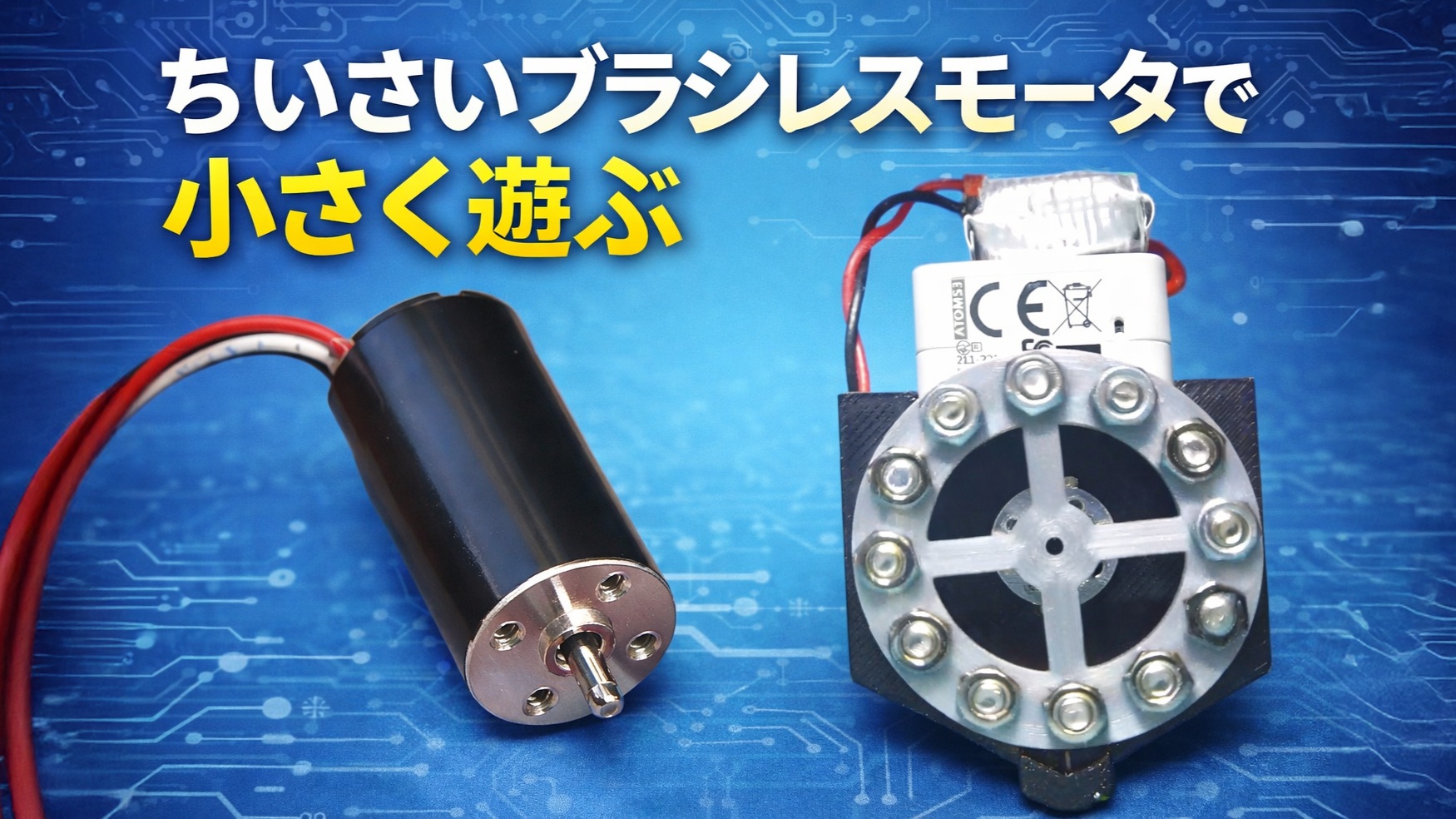
ちいさいブラシレスモータで小さく遊ぶ
今年 (2026年) にはいってから小さいブラシレスモータがAliExpressに出回っているように見受けられる (なんでだろね?ドローンブーム終了とか?)。 個人的にはうれしい。またいいモータに出会って来年 (2027年) の9重倒立実現確度を高めたいのだ。 ↑早速試しに1個 買ってみた...
電子工作 2026.2.8 お父ちゃん ![]()

ついに達成!!! 8重倒立への道4
前回はSHISEIGYO-1の筐体を新造して、7重倒立の検討を実施しました。 https://homemadegarbage.com/reactionwheel78// ここでは安定的7重倒立を実現させて、ついに8重倒立に挑戦します。 8台のモジュール 今...
電子工作 2026.1.18 お父ちゃん ![]()



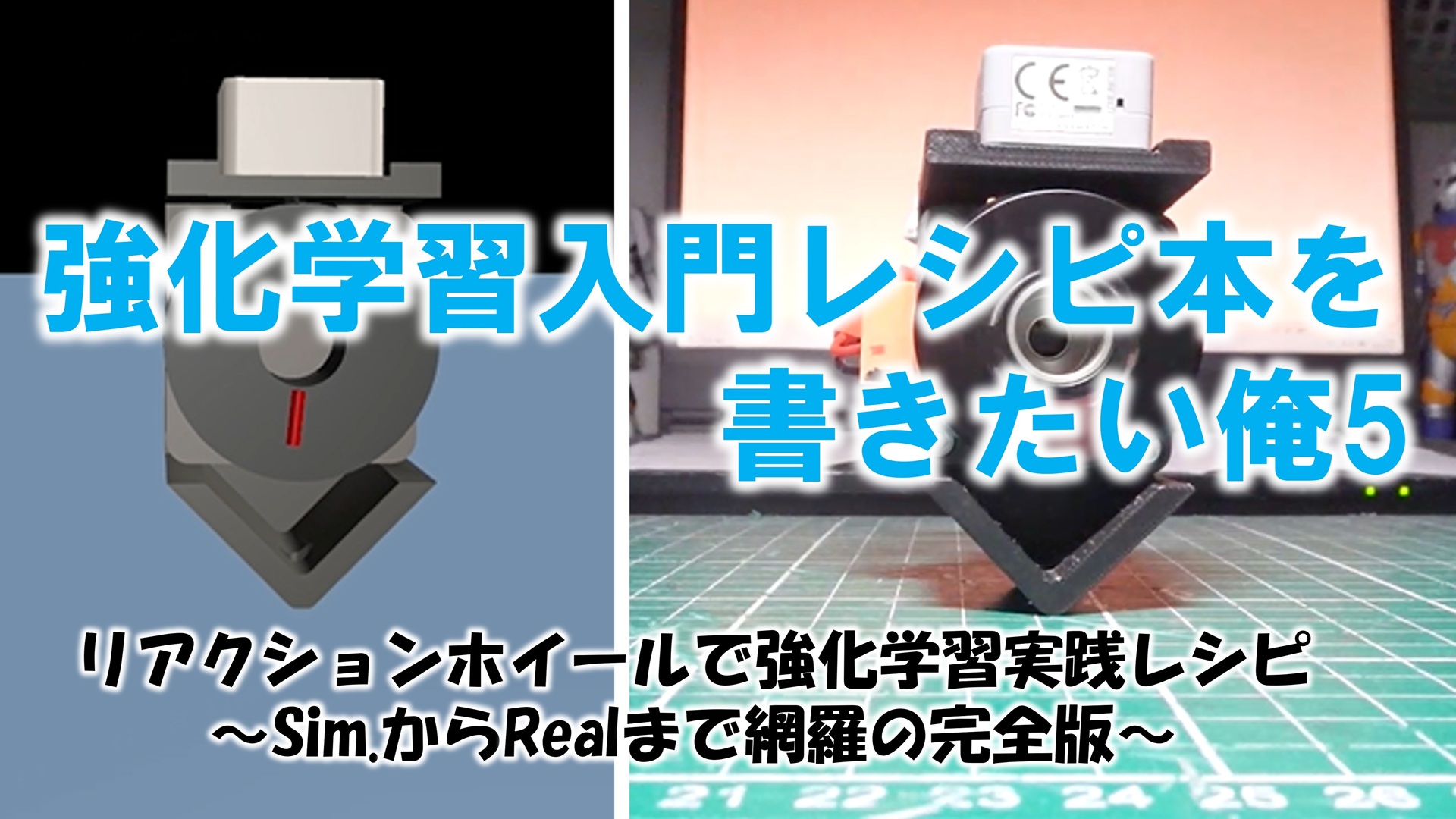
強化学習入門レシピ本を書きたい俺5 祝出版!! 涙の最終回
HomeMadeGarbage Advent Calendar 2025 |11日目 前回はレシピ用のリアクションホイール倒立振子機体で強化学習Sim2Realまで確認しました。 https://homemadegarbage.com/rl-recipe04/ 本連載を通して容易に組める実機で...
Advent Calendar / 電子工作 2025.12.11 お父ちゃん ![]()
強化学習入門レシピ本を書きたい俺4
HomeMadeGarbage Advent Calendar 2025 |9日目 前回はレシピ本用の倒立振子実機の開発を行い、さらにMuJoCoモデルも完成させました。 https://homemadegarbage.com/rl-recipe03// ここではついに強化学習を実施します。 ...
Advent Calendar / 電子工作 2025.12.9 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺3
HomeMadeGarbage Advent Calendar 2025 |6日目 前回は強化学習入門レシピ本の制作をめざして、ブラシレスモータによるリアクションホイール倒立振子の強化学習Sim2Real実施までおさらいしました。 https://homemadegarbage.com/rl-r...
Advent Calendar / 電子工作 2025.12.6 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺2
HomeMadeGarbage Advent Calendar 2025 |4日目 前回は強化学習入門レシピ本の制作をめざして、ブラシレスモータによるリアクションホイール倒立振子の強化学習実施までのおさらいをしました。 https://homemadegarbage.com/rl-recipe0...
Advent Calendar / 電子工作 2025.12.4 お父ちゃん ![]()

強化学習入門レシピ本を書きたい俺1
HomeMadeGarbage Advent Calendar 2025 |1日目 先日つぶやいたコチラのポストへの反応が凄くよかったのです。 強化学習について興味を持っている人が多くいるのだろうと感じました。 ←誉れ高き古典制御による職人技 →トレンドに乗じただけの軽佻浮薄な強化学習 ...
Advent Calendar / 電子工作 2025.12.1 お父ちゃん ![]()

シン SHISEIGYO-1 Walker の開発2
前回は PWMマイクロサーボと低価格ブラシレスモータによるリアクションホイールバランス2足歩行ロボット (シン SHISEIGYO-1 Walker) の製作を開始いたしました。 https://homemadegarbage.com/onewalker08/ ↓低価格なのに高精...
電子工作 2025.11.26 お父ちゃん ![]()