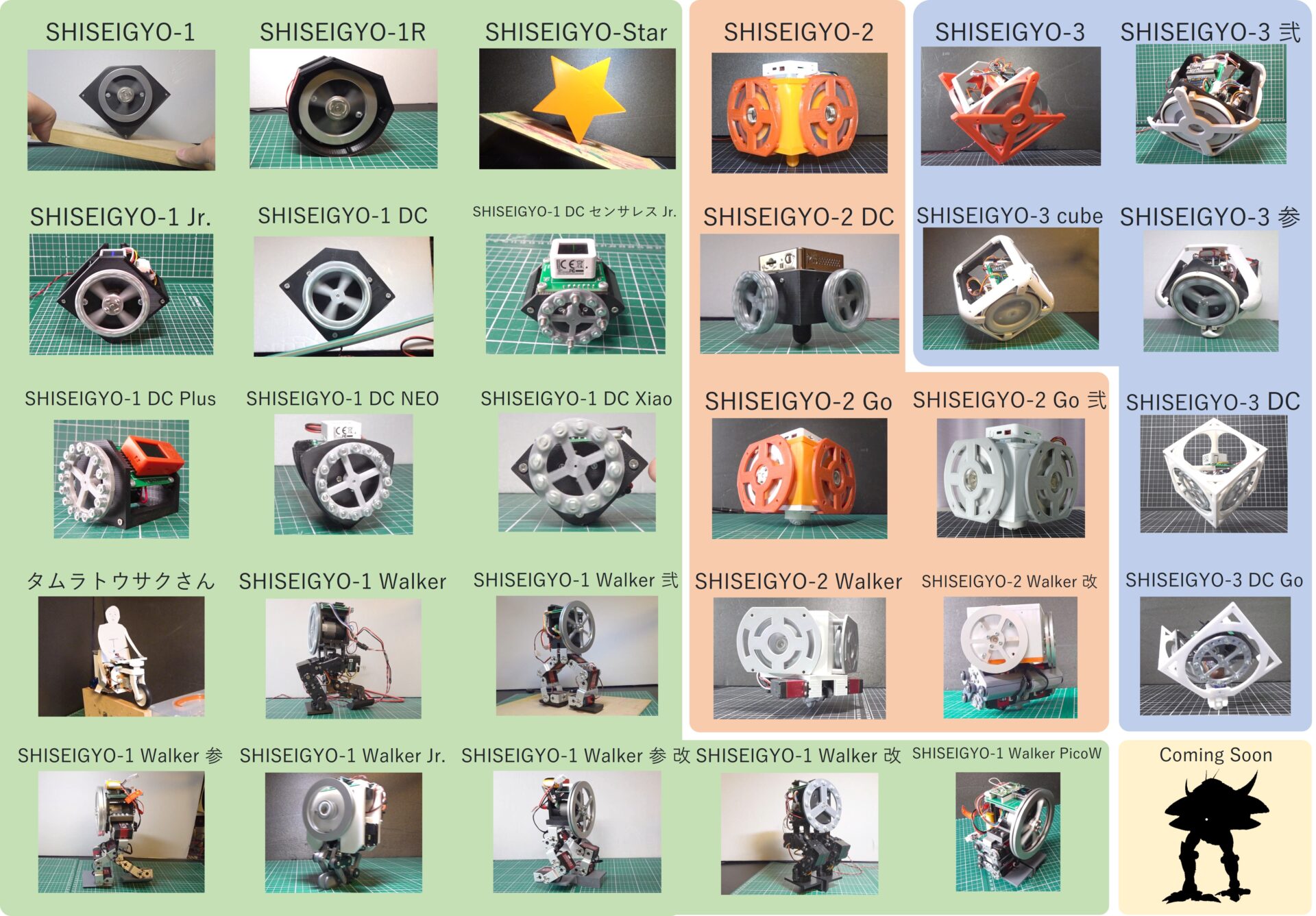
リアクションホイールへの道
二足歩行ロボット SHISEIGYO-1 Walker 改
これまでは SHISEIGYO-1 Walker 参 の足を改良して二足歩行動作を検証してきました。 https://homemadegarbage.com/onewalkersan09 ここでは 初代 SHISEIGYO-1 Walker の足を改良して歩行動作の検証を実施しま...
電子工作 2023.3.7 お父ちゃん ![]()
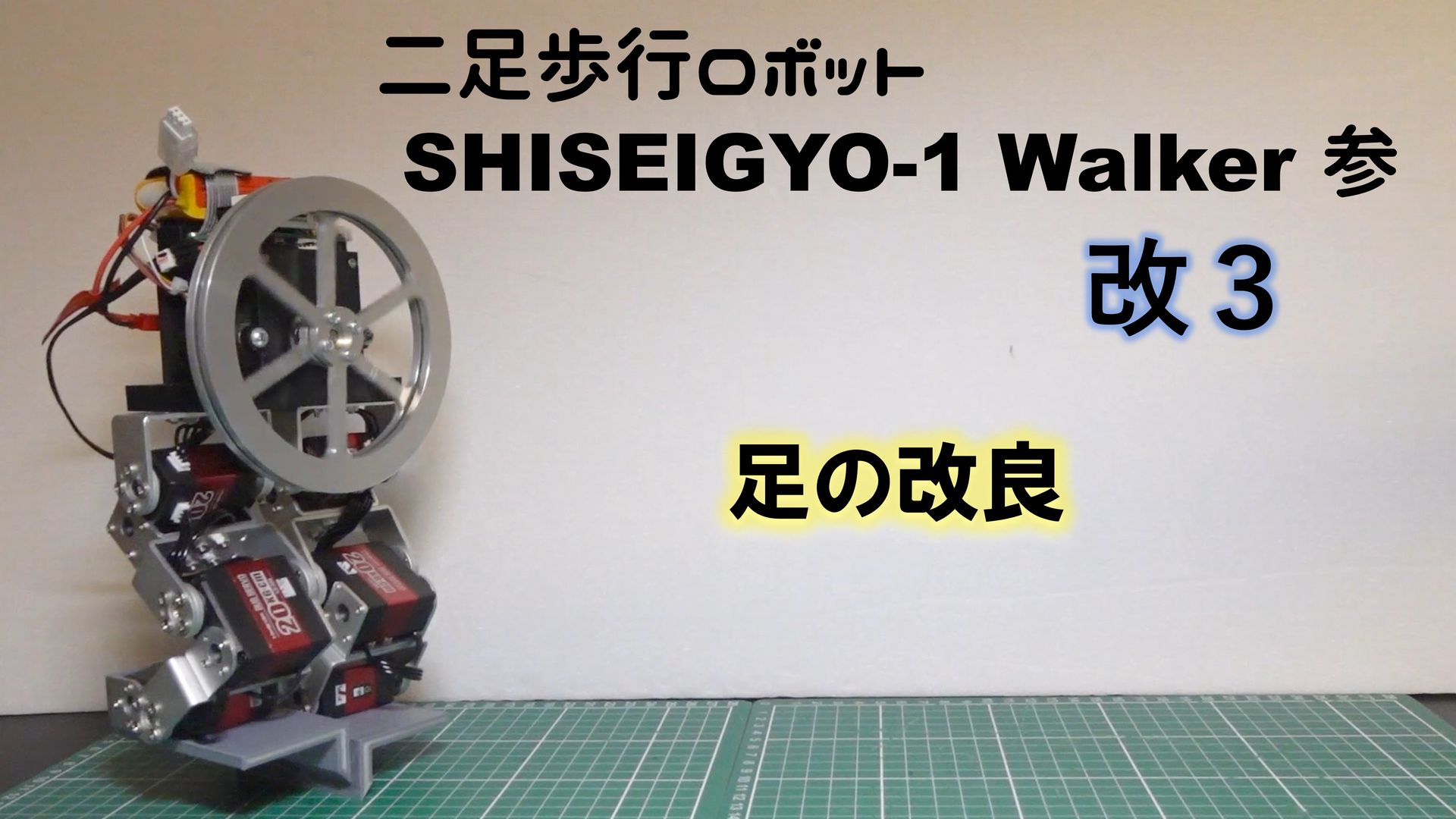
二足歩行ロボット SHISEIGYO-1 Walker 参 改 3
前回はSHISEIGYO-1 Walker 参 改 の足に平行リンク機構を導入しサーボ削減しての歩行動作を確認しました。 https://homemadegarbage.com/onewalkersan08// ここでは、通常の足に戻して再度歩行動作の検証を行いました。 ...
電子工作 2023.2.24 お父ちゃん ![]()
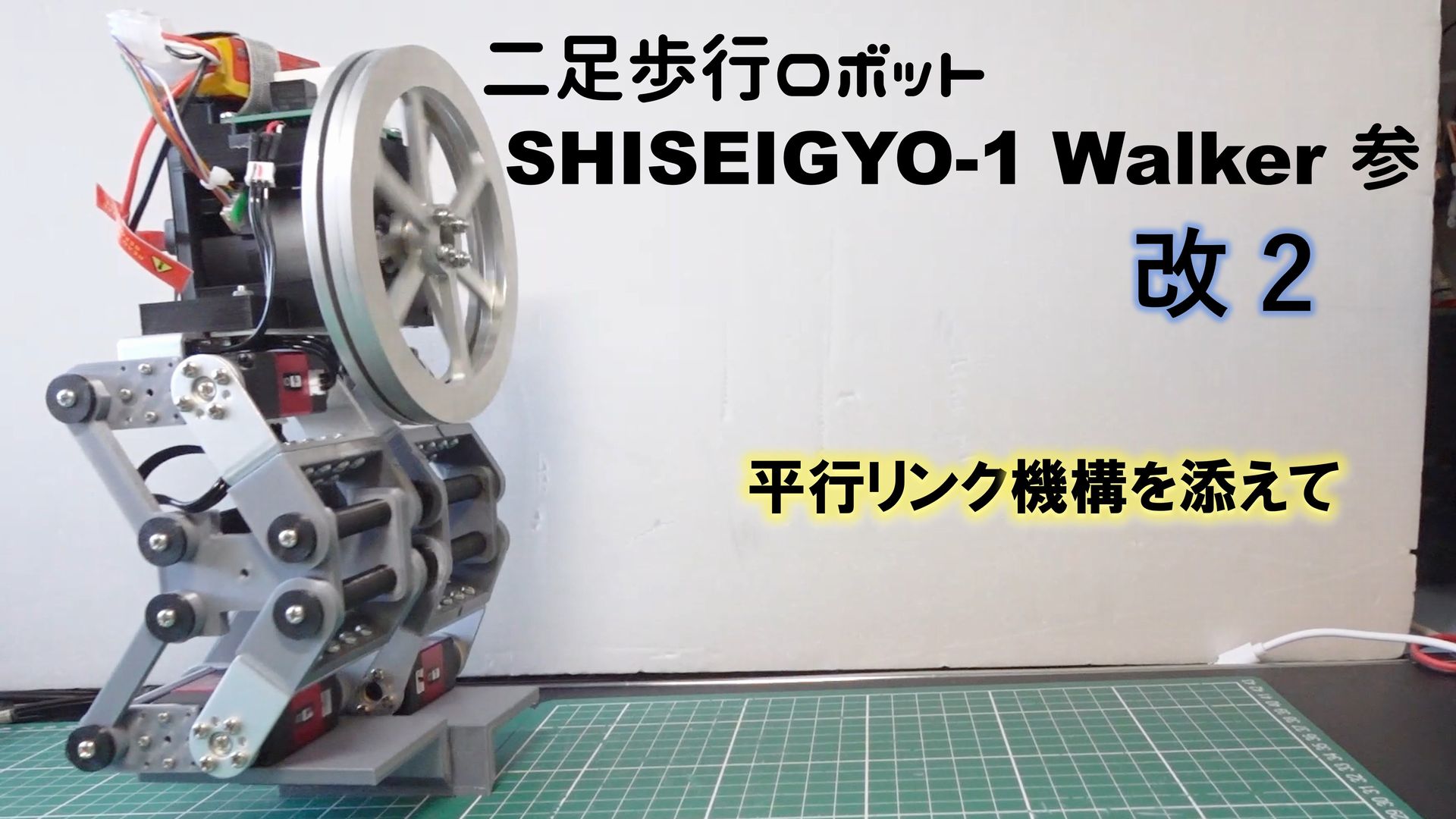
二足歩行ロボット SHISEIGYO-1 Walker 参 改 2
前回はSHISEIGYO-1 Walker 参 の足の構成を再検討し、2足歩行動作を実施しました。 https://homemadegarbage.com/onewalkersan07/ ここでは更に足の構成を再々検討しましたので報告します。 平行リンク機構検討 ...
電子工作 2023.2.22 お父ちゃん ![]()
二足歩行ロボット SHISEIGYO-1 Walker 参 改
以前 製作した SHISEIGYO-1 Walker Jr. の足のブレードの距離を開けてみたところ。。。 SHISEIGYO-1 Walker Jr. 足を1枚のブレード状につけてないといけないと思っていたけど 離してもいけるなぁ IDRS (倒立角動的再調整システム) が効いてる...
電子工作 2023.2.17 お父ちゃん ![]()
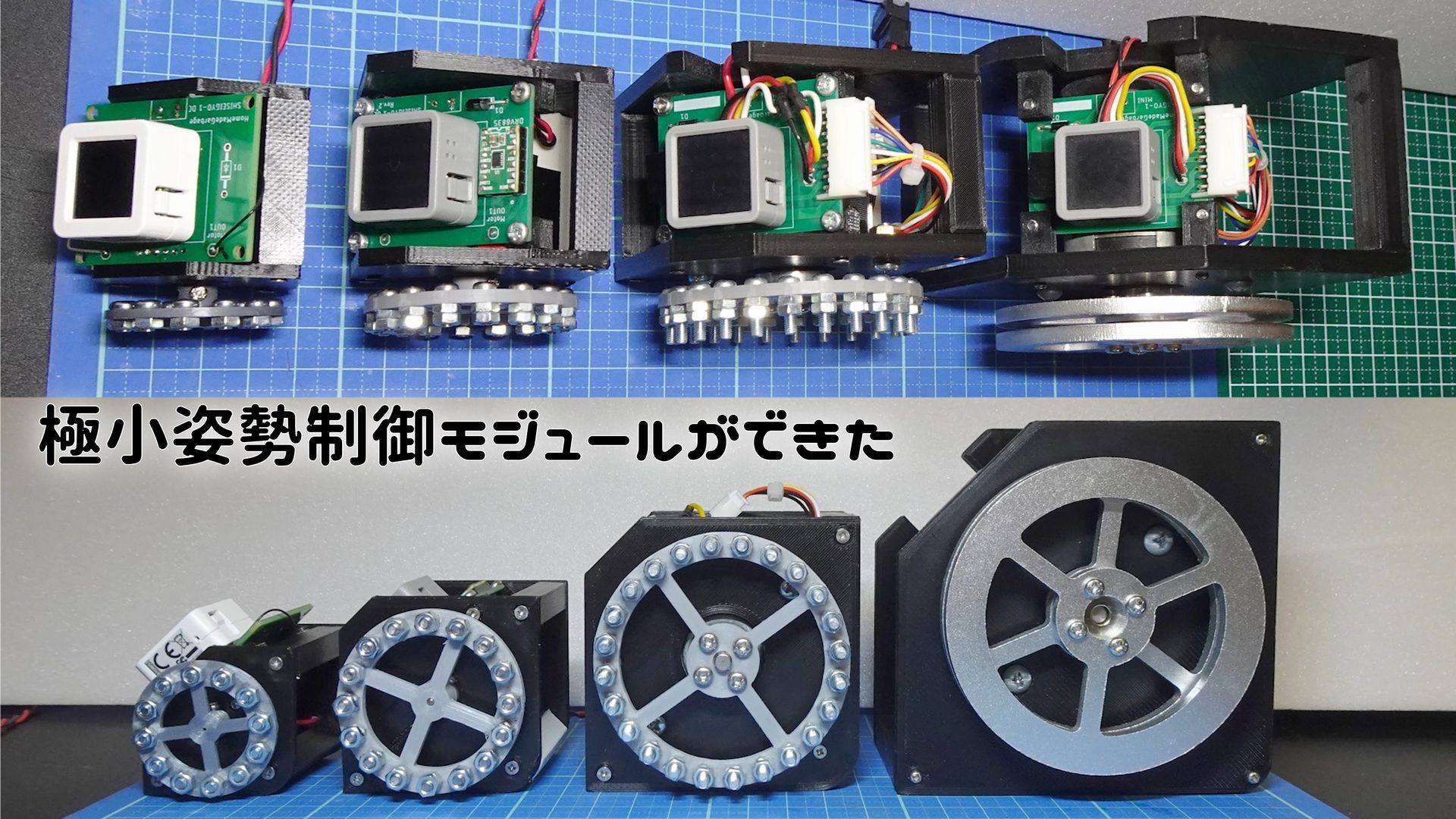
極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. ーリアクションホイールへの道56ー
前回は電流センシング機能付きのモータドライバDRV8876を使用してエンコーダなしのセンサレス姿勢制御モジュールを製作しました。 https://homemadegarbage.com/reactionwheel55// ここではミニ四駆用のモータより更に小さいモータを使用して、モジュールの小型...
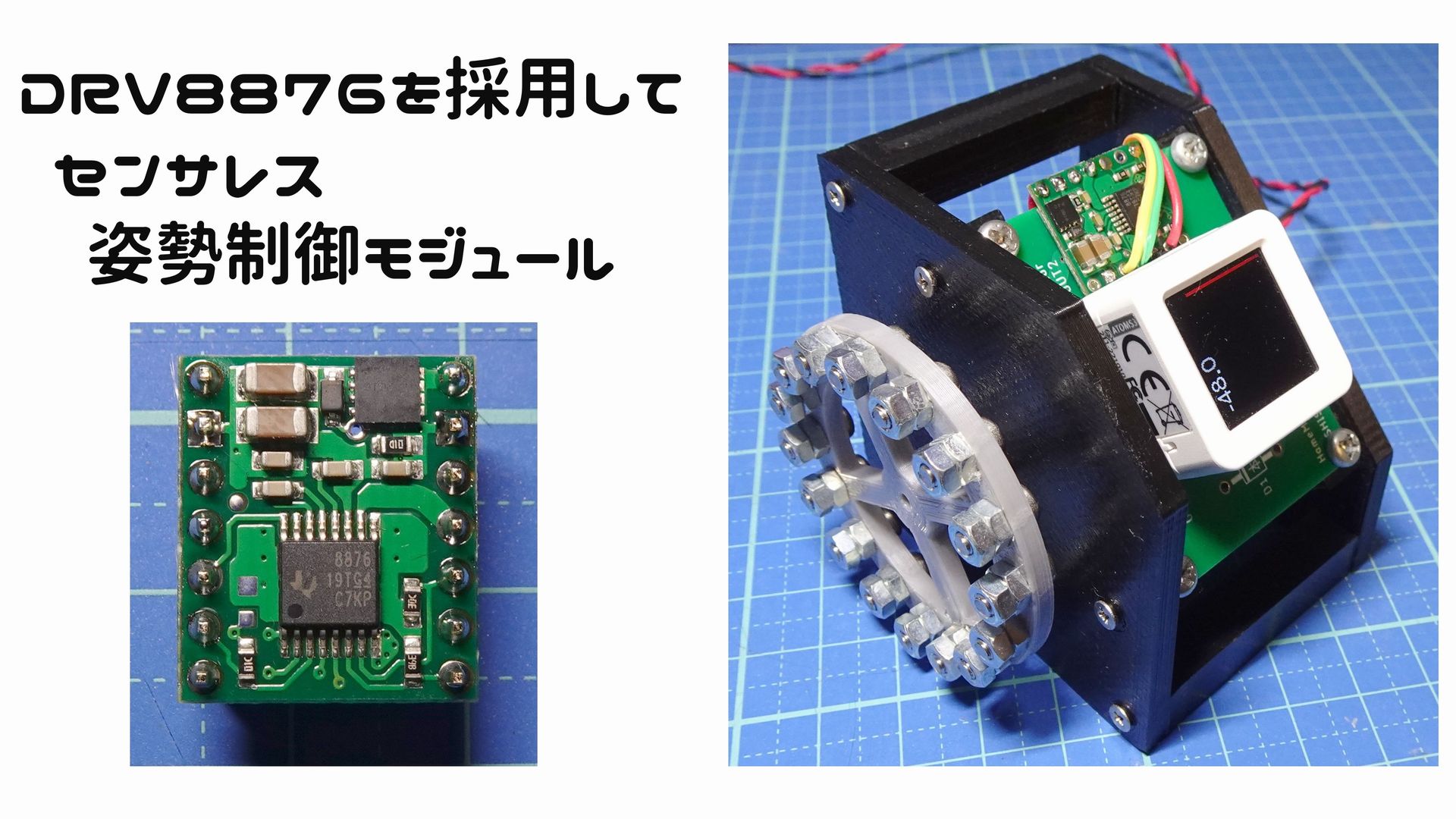
DRV8876を採用してセンサレス姿勢制御モジュール ーリアクションホイールへの道55ー
前回は電流センサでモータ電流を検知して回転速度を推定し、磁気エンコーダなしでのセンサレス姿勢制御モジュールの倒立動作を実現しました。 https://homemadegarbage.com/reactionwheel54// ここでは電流センシング機能付きモータドライバを採用して...
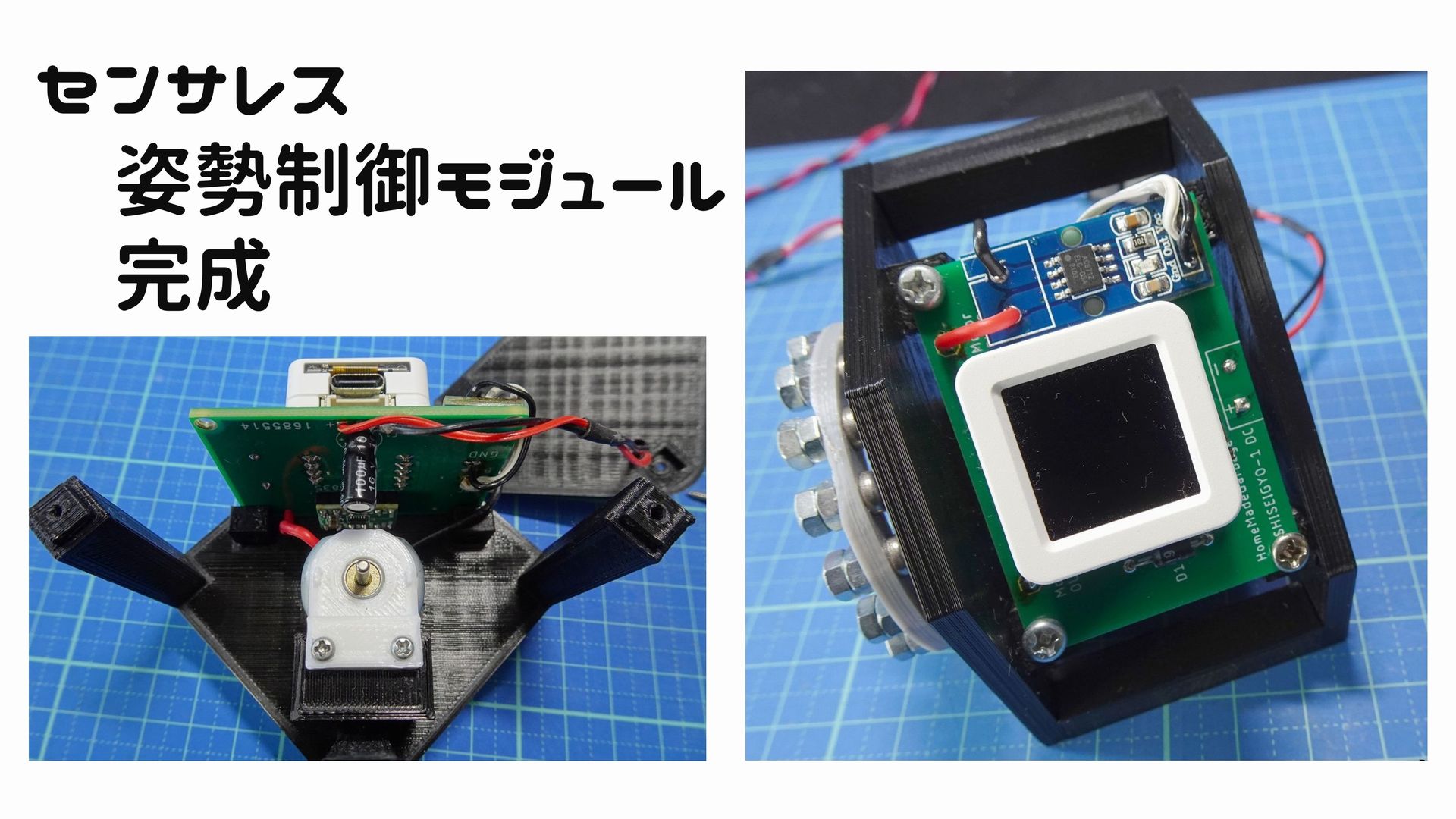
センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
先日は電流センサを用いて回転速度を推定するDCモータのセンサレス制御について学習しました。 https://homemadegarbage.com/dcmotor01 ここではこのセンサレス回転速度制御を姿勢制御モジュールに応用してみます。 SHI...
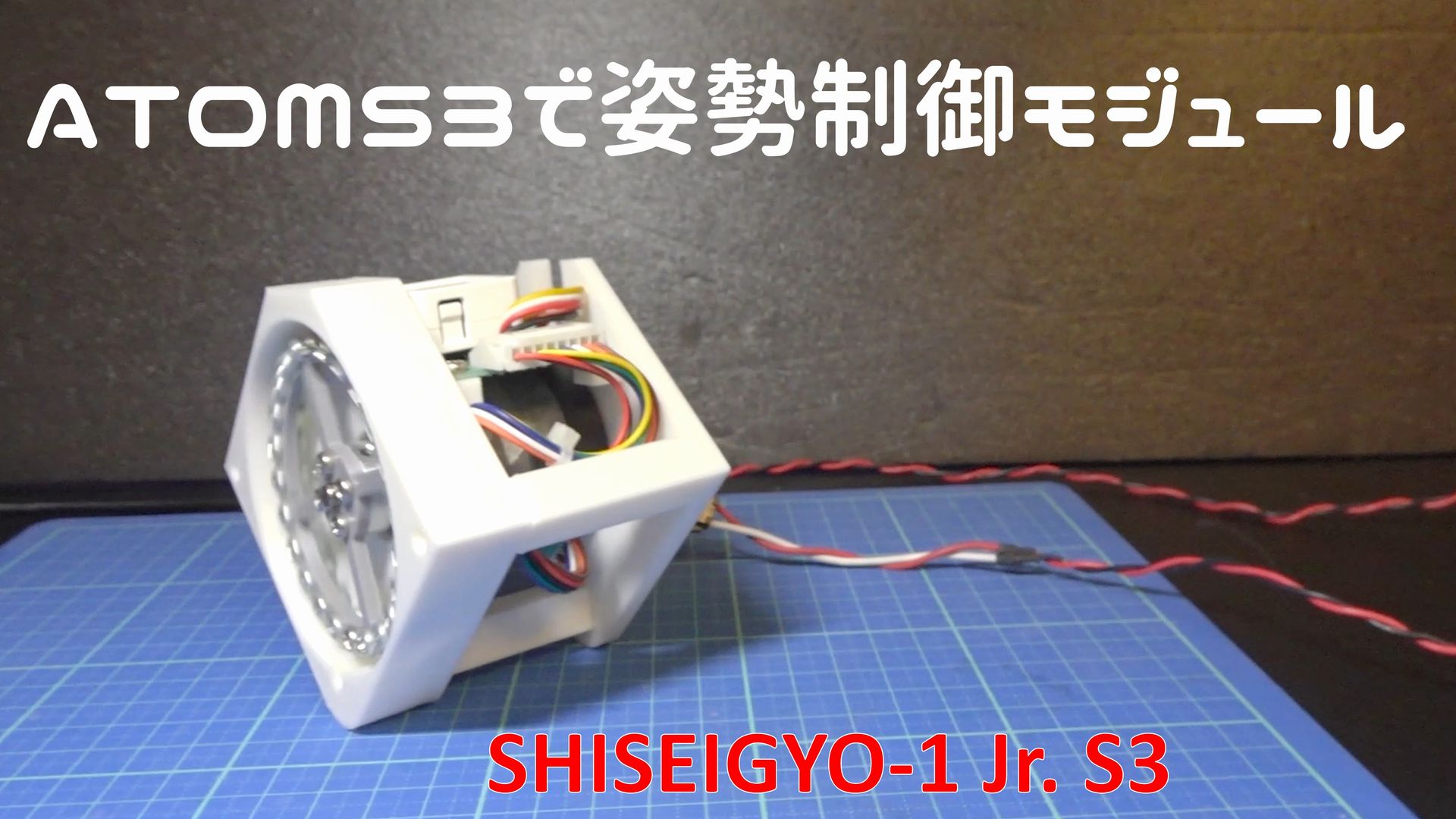
ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
先日 ATOMS3 という製品がM5Stack社から発売されました。 [bc url="https://docs.m5stack.com/en/core/AtomS3"] M5ATOM MatrixのLEDマトリクスがLCD (128×128ピクセル)に変更され、コントローラとしてESP32-S...
SHISEIGYO-1 Walker Jr. 差動駆動型リンク機構で歩行
前回はSHISEIGYO-1 Walker Jr. の足に平行リンク機構を採用し、ヒザのある歩行を実現いたしました。 https://homemadegarbage.com/onewalkerjr02 ここでは差動駆動型リンク機構を試しましたので報告いたします。 ...
電子工作 2022.9.30 お父ちゃん ![]()
SHISEIGYO-1 Walker Jr. ヒザ爆誕
前回は1個のリアクションホイールでバランスする小型の2足歩行ロボット"SHISEIGYO-1 Walker Jr. "の誕生を報告いたしました。 https://homemadegarbage.com/onewalkerjr01// 今回は足について更に検討してみましたので報告いたします...
電子工作 2022.9.28 お父ちゃん ![]()
SHISEIGYO-1 Walker Jr. 爆誕
これまでリアクションホイールでバランスする2足歩行ロボットを3体ほど製作してきました。 https://homemadegarbage.com/onewalkersan06 この度、4台目の製作を実施いたしましたので報告させていただきます。 コンセプト ...
電子工作 2022.9.25 お父ちゃん ![]()

DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー
以前、ミニ四駆のDCモータを用いて1軸の姿勢制御モジュール SHISEIGYO-1 DC を製作いたしました。 https://shop.homemadegarbage.com/product/shiseigyo-1-dc_recipe/ ここではミニ四駆 DCモータを用いての2...
電子工作 2022.9.18 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺6 ーバッテリ内蔵ー
前回はSHISEIGYO-1 Walker 参 の歩行動作の実現を確認できました。 https://homemadegarbage.com/onewalkersan05// SHISEIGYO-1 Walker 参はリアクションホイールでバランスをとり、格安シリアルサーボLX-244で構成された...
電子工作 2022.9.13 お父ちゃん ![]()
SHISEIGYO-1 Walker 参 を実現させたい俺5 ー歩行検討3ー
だいぶ期間があいてしまいましたが、シリアルサーボLX-244で足を構築しリアクションホイールでバランスをとる二足歩行ロボット"SHISEIGYO-1 Walker 参" の歩行検討を実施いたしました。 前回は歩行動作の自動化を目指し歩行動作をプログラミングしましたが上手くいかず、サーボのギアに...
電子工作 2022.9.8 お父ちゃん ![]()

SHISEIGYO-1 Walker 参 を実現させたい俺4 ー歩行検討2ー
前回はシリアルサーボLX-244で構築した足の形状を検討し、遠隔で足の位置を手入力で指定しながら足を交差させての一歩を踏み出すことができました。 https://homemadegarbage.com/onewalkersan03/ ここでは手動による足座標指定ではな...
電子工作 2022.7.9 お父ちゃん ![]()