SHISEIGYO-1 Walker 弐 を実現させたい俺1 ーキックオフー
本記事にはアフィリエイト広告が含まれます。
以前に姿勢制御リアクションホイールに足をつけて2足歩行ロボットを製作しました。
1号機のSHISEIGYO-1 Walkerはシリアルサーボ KRS3301を使用しておりました。
SHISEIGYO-1 Walker 歩行検討
そーっと そーっと#2足歩行ロボット #二足歩行ロボット#ロボット #robot #Robotics #ReactionWheel pic.twitter.com/nDP9VV90gG— HomeMadeGarbage (@H0meMadeGarbage) January 27, 2022
ゆっくりではありますが、リアクションホイールによる自律的重心移動動作を実現し2足歩行を実現できました。
但し、サーボのトルクが6.0kg・cm程度と低くホイールを重くできないなどの制約もありました。
ここでは足に使用するサーボモータをかえて2号機 (SHISEIGYO-1 Walker 弐) の製作を実施します。
目次
サーボモータ入手
AliExpressで高トルクのサーボを購入いたしました。
真っ白なカンバスを目の前にしてる時と同じ気分さ pic.twitter.com/d1Pbg3OSP7
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2022

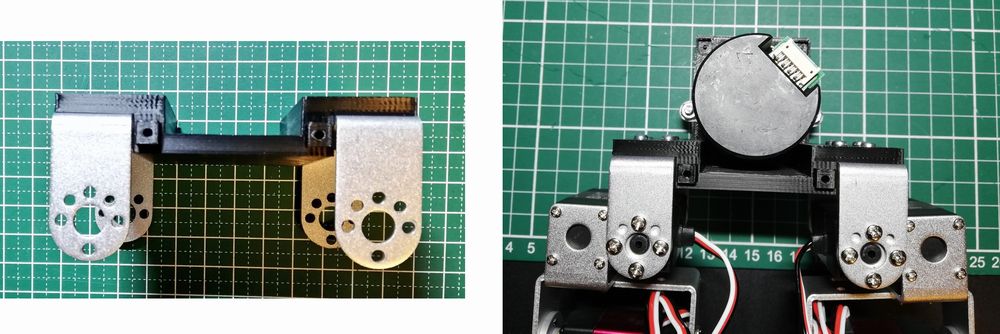
アルミフレームもついて連結しやすく、簡単に足的なモノを構成できました。
プランプランplan pic.twitter.com/qTIREY4d21
— HomeMadeGarbage (@H0meMadeGarbage) March 13, 2022
ちなみに上の動画で使用してるコントローラは以下。
50HzのDuty 5~10%のPWM信号を出力します。
[amazonjs asin=”B00JK9UFZC” locale=”JP” title=”【ノーブランド品】ステアリング ギア テスター サーボ モータ テスター”]
合計8個のサーボで両足を構成して、ESP32の評価ボードとモータドライバ PCA9685で動かしてみました。
両足屈伸 pic.twitter.com/JoONX2YUvs
— HomeMadeGarbage (@H0meMadeGarbage) March 14, 2022

[amazonjs asin=”B07SLRG5J1″ locale=”JP” title=”VKLSVAN 2個 PCA9685 16チャンネル 12-ビット PWM Servo モーター ドライバー IIC モジュール Arduinoと互換”]
屈伸動作は逆運動学で足高さを指定して動かしています。
SHISEIGYO-1 Walker 弐 製作
ESP32の評価ボードとモータドライバ PCA9685にIMUセンサMPU6050を加えて、更にブラシレスモータを制御します。
私のロボティクシステム pic.twitter.com/PPTOw9zeQt
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2022
組立てました。
1号機のSHISEIGYO-1 Walkerより大きくなりました。
足は同様にかまぼこ状です。
SHISEIGYO-1 Walker 弐
組み立て感性 pic.twitter.com/Vnkc3zVWWX— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2022
倒立も実現できましたが、高さがあるためか少しフラフラしています。
立った立った pic.twitter.com/KUnKDehUgS
— HomeMadeGarbage (@H0meMadeGarbage) March 15, 2022
ホイールは市販のアルミホイールを2枚重ねにしておもさが約125gありますが、サーボが強力なので全く問題ありません。
3枚重ねにして更に重くして試してみましたが、モータが熱くなって苦しそうなので2枚にしました。
調整
倒立がフラフラなので、極力ホイール高さを低くしてみました。
足の付け根を上げて、モータ固定位置を下げました。
だいぶ安定してきました。
だいぶ安定したかな pic.twitter.com/NXpp3boRxN
— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2022
BLEでESP32に信号をおくって手動で前後動作させました。
SHISEIGYO-1 Walker 弐
恐る恐る前後体重移動 pic.twitter.com/HitpoxUK49— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2022
若干不安定で怖いです。。
再調整
色々足の構成を変えて、高さを低くして安定性の向上など目指しましたがあまりうまくいきませんでした。
腿だけ戻して
高さ調整 -32mm→ -16mmに変更 pic.twitter.com/yphZlPKQI8— HomeMadeGarbage (@H0meMadeGarbage) March 17, 2022
足の高さを変えると足を交差させて足底を一直線にする際に他方の足に干渉してしまうなどの問題がありました。
またこのサーボの場合 角度指定の際にばらつきがあり(正方向と逆方向時に静止位置が異なったりする)、複雑な動作は難しいかなという結論に至りました。
方針変更
今回のサーボは高トルクですがサイズが大きく角度の精度も低いので、1号機のように足を交差させての歩行は難しいと判断しました。
以下のような構成にして歩行を目指すことにしました。
今回 味見してるサーボ
怪力だけどデカいし角度の精度も低いので
交差しての歩行はあきらめるこの構成でSHISEIGYO-1 Walker 弐 を育てていく所存 pic.twitter.com/hn9XQqyjef
— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2022
足をロールさせるサーボを減らして、足1本あたり3個のサーボ
合計6のサーボを使用して足を構成しています。
前後動作も比較的安定しているので、歩行動作にも可能性ありです。
前後動作
ホイール側が重くてバランス悪いので
足動作で調整必要だな pic.twitter.com/oOkvwKy8XQ— HomeMadeGarbage (@H0meMadeGarbage) March 19, 2022
ちなみに足底はかまぼこ状なのでホイール回転なしでは自立しません。
足はかまぼこ状なのでホイール回転なしでは
自立できません pic.twitter.com/sdiBFIdFne— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2022
おわりに
ここでは高トルクの中華サーボでのリアクションホイール2足歩行ロボットの製作を開始しました。
製作の過程でサーボの特性を理解しつつ調整を重ねだいぶ方針が固まってきました。
次回は歩行を目指したいと思います。
それではまた。
次の記事