SHISEIGYO-1 Walker 弐 を実現させたい俺2 ー歩行検討ー
本記事にはアフィリエイト広告が含まれます。
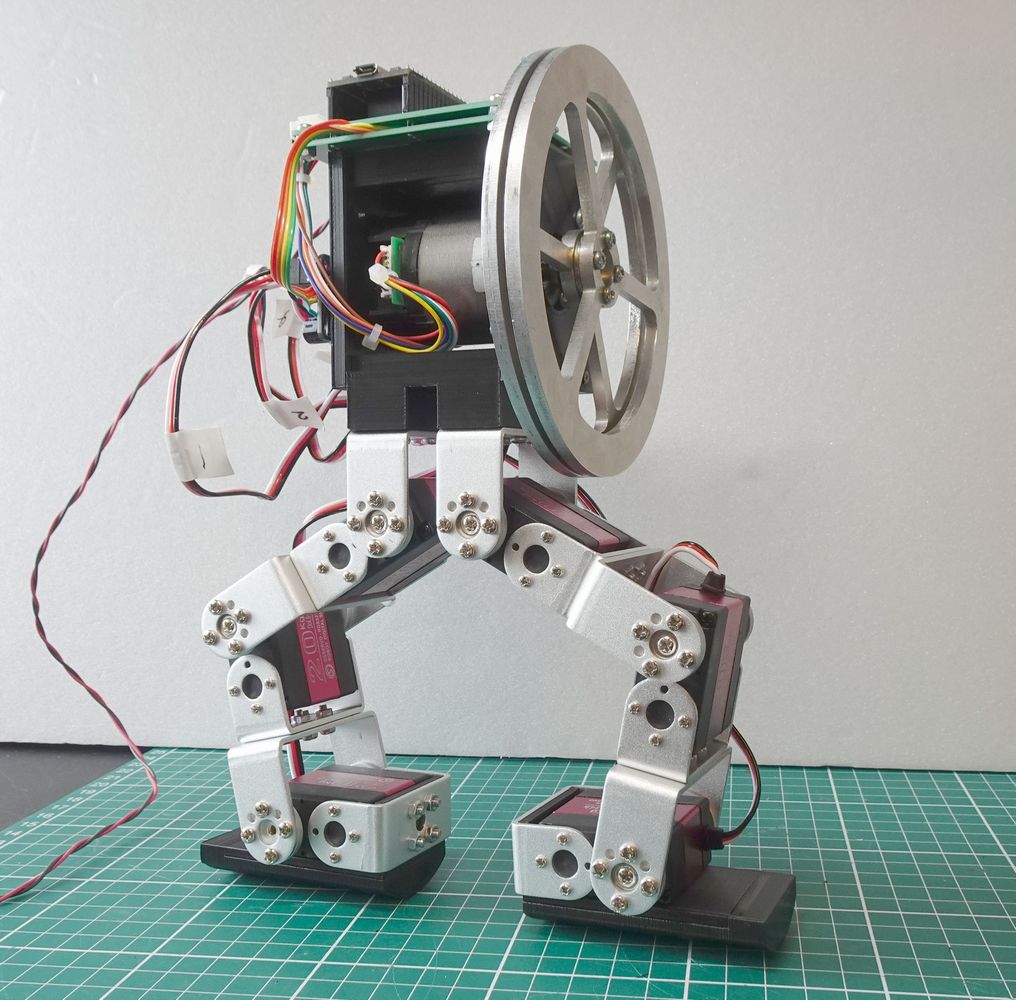
前回は高トルク中華サーボで足を構築して、リアクションホイールでバランスをとるロボット(2号機)を検討しました。
サーボの大きさや動作角度の精度を鑑みて以下のようなガニ股型のロボットにいたしました。
ここでは歩行を検討いたしました。
歩行検討
重心を片足に載せて、他方の足を上げて進行方向に出し重心をシフトして他方の足を戻すを繰り返します。
想像以上に可愛くなくて喜んでいる pic.twitter.com/1Ub0ZurLGk
— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2022
歩幅は1cmと大きくないですが
流石 20kg・cmと高トルクのサーボなので、かなり高速の重心移動が実現できました。

足底をかまぼこ状にしてリアクションホイールでバランスをとっているので、床が傾いても足が滑らなければ平気でバランスして歩行します。
SHISEIGYO-1 Walker 弐
リアクションホイールでバランスとりつつ
2足歩行するロボットをこしらえました。#2足歩行ロボット #二足歩行ロボット pic.twitter.com/dPyxKIKJyi— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2022
SHISEIGYO-1 Walker
1軸のリアクションホイールでバランスとりつつ 2足歩行するロボットは今回で2台目の製作となります。
自作の2足歩行ロボット pic.twitter.com/z1zXNLrWeo
— HomeMadeGarbage (@H0meMadeGarbage) March 20, 2022
1号機はシリアルサーボ KRS3301を使用しました。 トルクが足りず( 6.0kg・cm)、ゆっくりとした歩行しかできませんでした。
SHISEIGYO-1 Walker 歩行検討
そーっと そーっと#2足歩行ロボット #二足歩行ロボット#ロボット #robot #Robotics #ReactionWheel pic.twitter.com/nDP9VV90gG— HomeMadeGarbage (@H0meMadeGarbage) January 27, 2022
今回 高トルクのサーボの使用で速い重心移動が確認できましたので、次回は高トルクでかつ精度の高いサーボを使用して高速での足を交互に進める歩行を目指したいです。
KRS-2572あたりが最適でしょうか。価格も高いので少しづつ集めて製作進めたいと思います。

おわりに
ここでは高トルクPWMサーボでのSHISEIGYO-1 Walker 2号機の歩行を検討しました。
課題は残りましたが、それは希望とも言え リアクションホイールによるバランス機構を用いてスムーズに2足歩行するロボットの実現確度はかなり自身の中で向上しました。目を閉じればもう姿が見えているほどです。
ただ理想と考えるサーボを導入するには資金が必要となりそうなのでコツコツ貯めていきたいと思います(過剰な労働は絶対にしたくないので)。
余談ですが。今回 SHISEIGYO-1 Walker 弐 をTwitterにアップしたところ、以下のようであると感想をいただきました。
- チャップリン
- どじょうすくい
- タイムボカンエンディングテーマで出てくるマージョ一味
ガニ股がレトロな印象を与えているのでしょうね 😆
そういえば平成以降ガニ股はとんと見なくなった気がいたします。
現在ガニ股は競合がいない状況ですので何かチャンスがあるかもしれません。