懲りずに まぁた 倒立振子 作ってるぞコイツ
本記事にはアフィリエイト広告が含まれます。
私は定期的に倒立振子を作る人間です。
足のないシンプルな車輪倒立振子で坂道でも機体水平を保てないか以後もいろいろ試したのだけど 諦めました。
坂道を重心シフトなしのモータトルク制御のみで走行は無理だということが分かりました。
同時に倒立振子には足があった方が良いという結論を得ました。
足があれば重心シフトも容易ですし、走行動作の自由度も高まります。
いつか足つきの”私の考えるベスト倒立振子”を作ろうとうっすら思っていたのですが、また課題が発生してしまいました。

目次
課題:ジャンプ
以下の動画の最後で坂から落ちてバランスを崩し倒れる倒立振子
高級なるベクトル制御 (SimpleFOCライブラリ使ってるだけだけど) でブラシレスモータを制御して倒立振子を実現
ぶーん pic.twitter.com/JELoGDfKyU
— HomeMadeGarbage (@H0meMadeGarbage) February 24, 2026
高いところから落ちてもバランスする機体がつくりたい
強くそう思いました。
着地時にすぐに姿勢を制御する必要があるでしょうからモータトルクを高くしてタイヤの径を大きくするのが良いだろうと想像します。
機体製作
ジャンプの検証をどうしても実施してみたくなったので
早速 大きめのブラシレスモータでテスト用の倒立振子を作ってみます。
IMU、コントローラ
姿勢検知用IMUセンサは壊れたATOMS3から摘出したMPU6886を採用
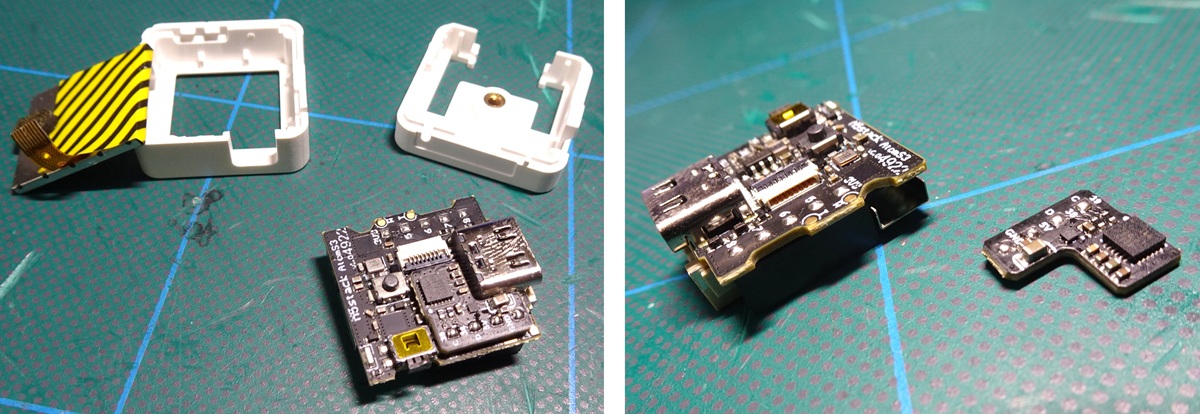

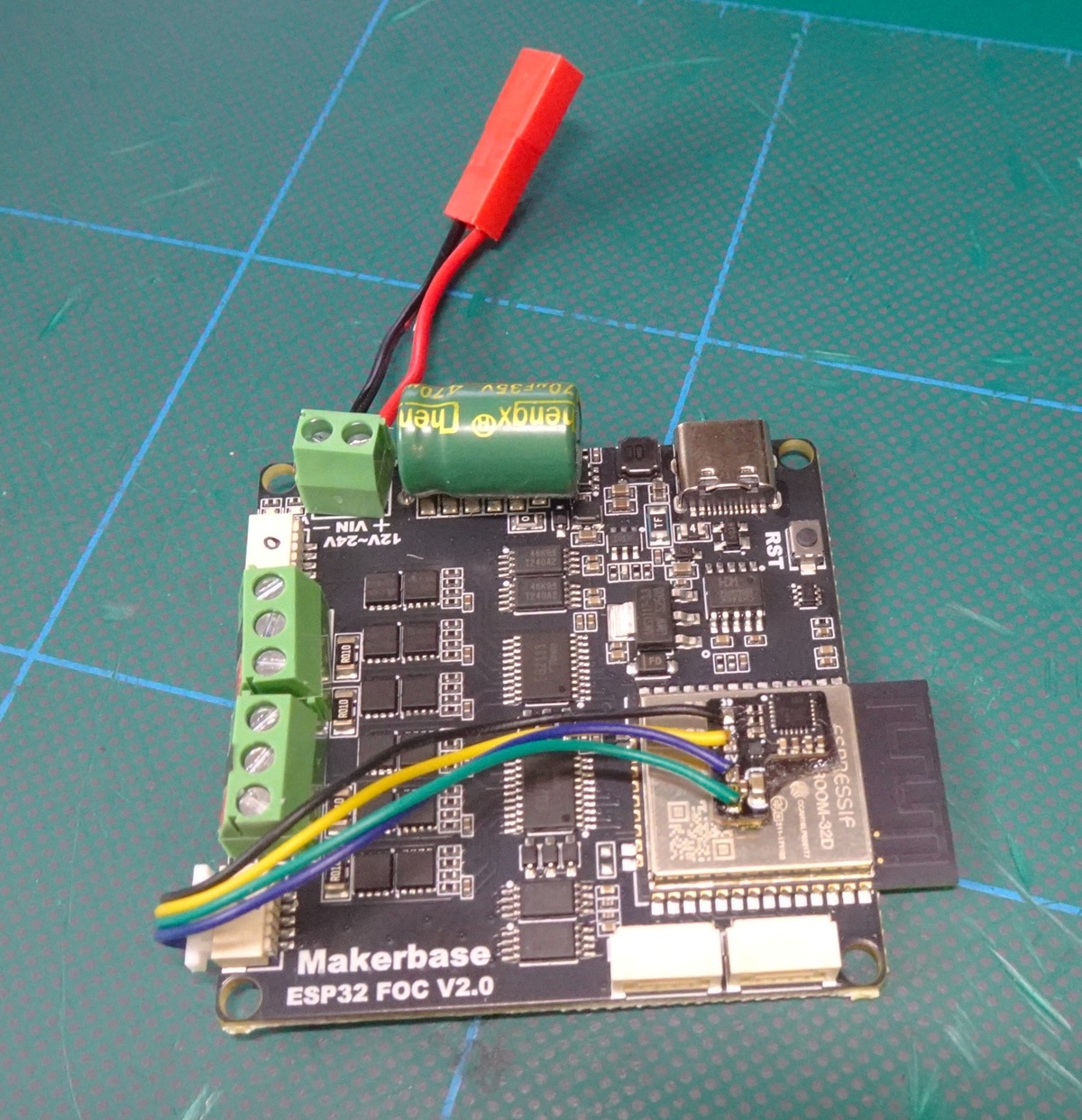
コントローラは MKS ESP32 FOC V2 を採用
MPU6886をI2Cで接続
MPU6886をカルマンフィルタでいただく pic.twitter.com/jLjZekH6ze
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026

I2Cマルチプレクサ、磁気エンコーダ
磁気エンコーダはインターフェースがI2CのAS5600を使用します。
I2CはIMUセンサで1個をすでに使用してしまっているためI2Cマルチプレクサを介してエンコーダ2個を接続します
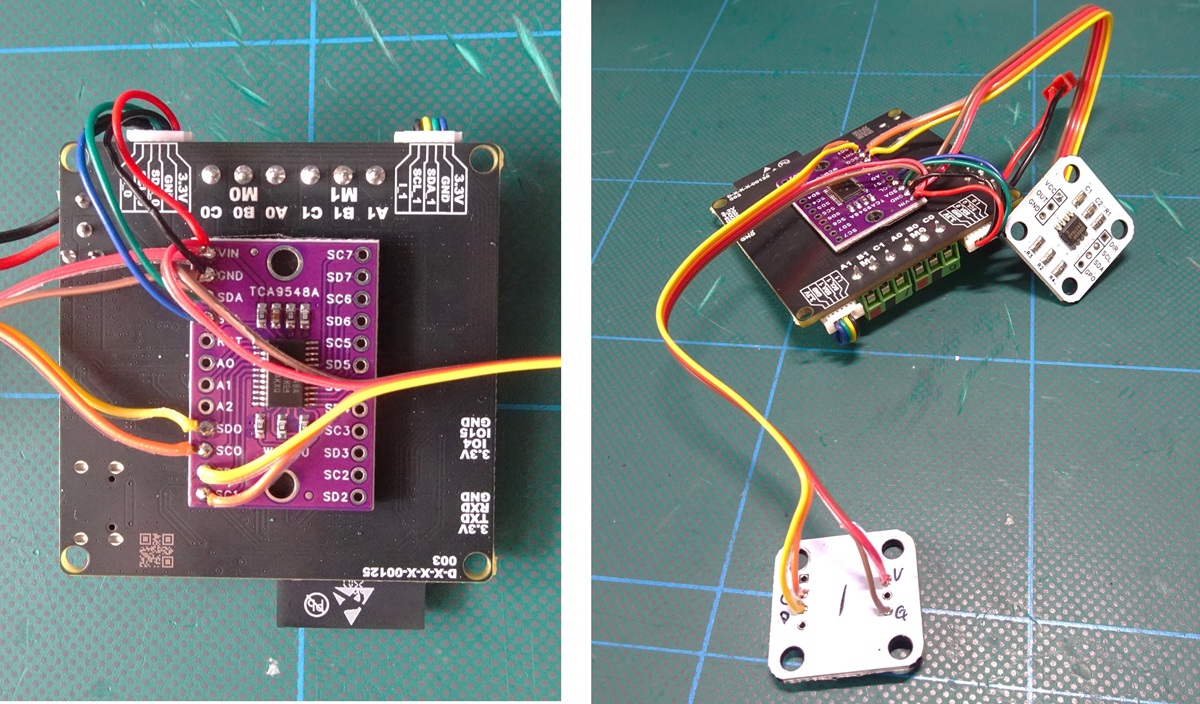
I2Cアドレスが選択式で切り替えれればいいんだけど。。。
そういうエンコーダって流通してないんだよ
モータ、筐体
筐体を3Dプリントして各部品固定
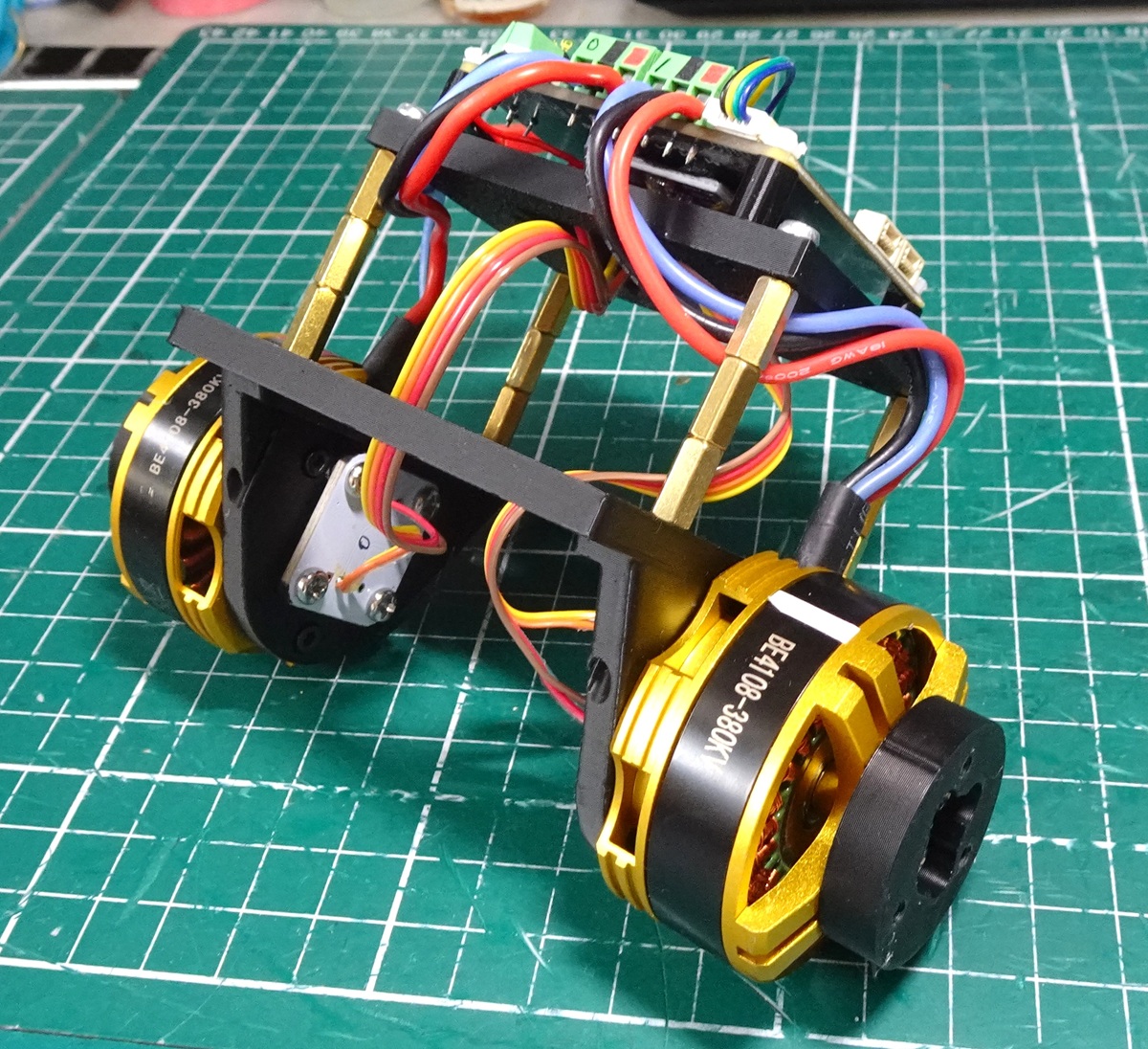
モータはドローン用ブラシレスモータの BE4108 を採用

モータ配色に合わせてスペーサは金色の真鍮製を採用
タイヤ、バッテリ
タイヤは大きなサイズにするつもりだけど暫定でタミヤのを付けた
タイヤは大きくするつもりだけど
暫定でいつものTAMIYA pic.twitter.com/AjWjejhd6F— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026
バッテリは11.1V 3セルLiPoを使用
電源は元気な3セルLiPoバッテリ pic.twitter.com/6GuwcO1r4p
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026
完成
とりあえず完成!
倒立振子
高さに弱いの何とかしたい pic.twitter.com/vqANYwMK7j— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026
この機体で高いところからのジャンプの実現を目指します。
タイヤ
応答性改善とモータサイズに合わせてタイヤを大きくします。
3Dプリントで直径 80mmにしました。
タイヤ径 とりあえずの80mm pic.twitter.com/6EgdxR2E59
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026
タイヤにはダイソーで買ったすべり止めシートを貼りました。

ジャンプ実験1
ジャンプ実験開始
まずは高さ18mmから
才能あるから何やってもうまくいく pic.twitter.com/KrbUDGOyi7
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2026
ダメでした。。。
重心降下
バッテリ位置を下げて重心を下げてみます。
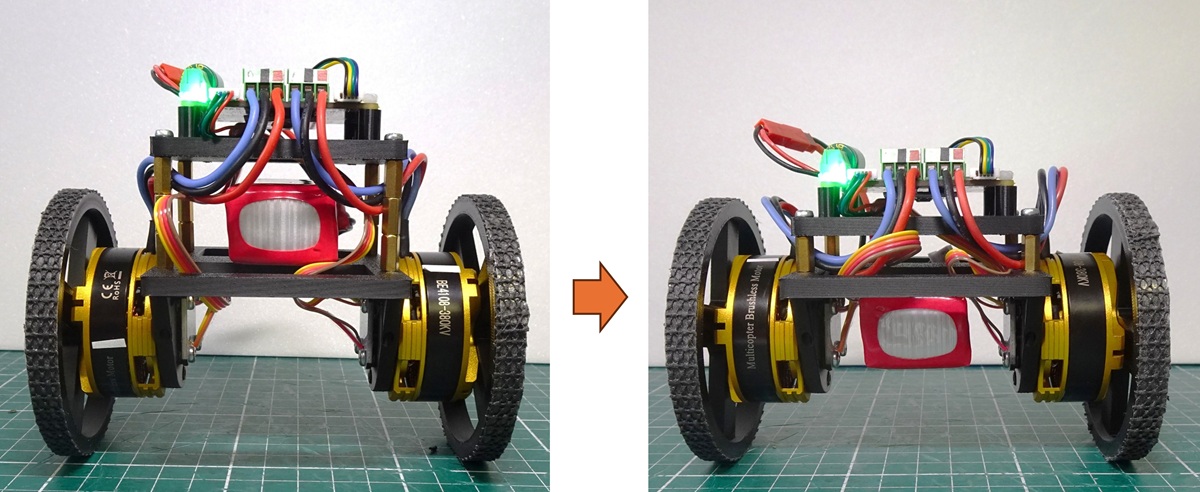
重心下げで18mmジャンプ成功
超高層 18mmジャンプ成功 pic.twitter.com/ButHlwEbbF
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2026
制御ゲイン調整
18mm以上の高さも試したのですがうまくいかず、制御パラメータを色々いじって実験していたところ。。。
AKIRA6巻は優勝でしょ pic.twitter.com/t7UiztL7r3
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2026
モータ回転速度のフィードバックを小さくすることで、分厚いで定評のあるAKIRA 6巻からの着地に成功しました。
AKIRA4~6巻を重ねて機体から高くしても着地に成功
AKIRA 4~6はほぼスカイダイビング
今回の実験で理解できた
↓真髄は pic.twitter.com/x7KHFDYTwK
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2026
モータ回転速度フィードバックゲインを小さくすることで 空中時の負荷軽減による急激な速度変化が無視されるため、着地後も正常に倒立が保持されているようです。
ジャンプ実験2
重心下方に変更よりもモータ回転速度フィードバックゲインを小さくすることが効いているようだったので
重心をもとに戻しました。
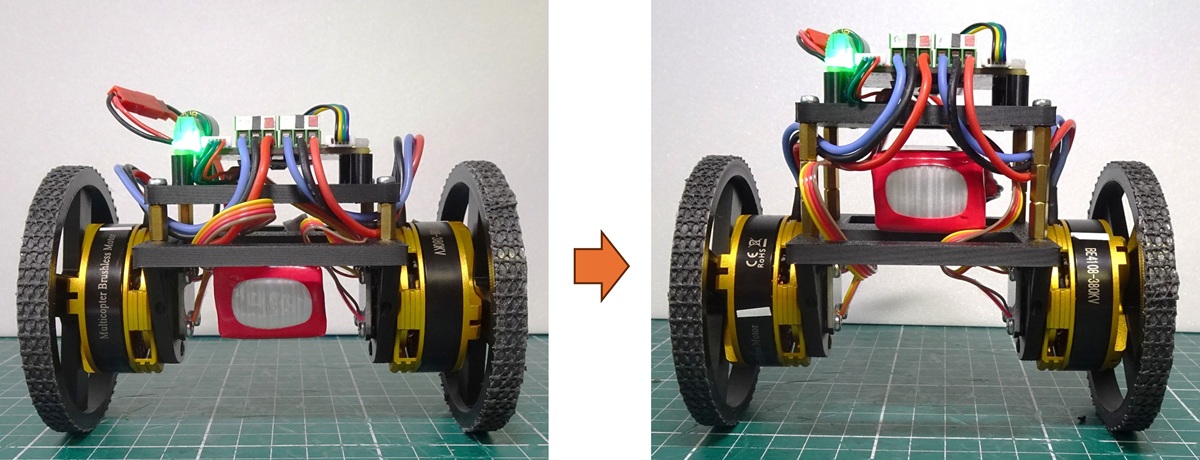
重心をもとに戻してのジャンプ実施
機体重心戻してジャンプ
やはり空中ではモータ回転速度フィードバックしないが正解みたい pic.twitter.com/CPsEenUOHZ
— HomeMadeGarbage (@H0meMadeGarbage) March 5, 2026
無事に成功したのでゲイン調整でジャンプ着地動作は改善できることが分かりました。
しかし回転速度フィードバックゲインを小さくしすぎると通常時の走行安定性に影響があります。
ジャンプ時に自動でゲインを可変にできればいいのだけど。。。
自動的に制御ゲイン調整できるようにしないとダメだわ pic.twitter.com/jvD2jbCrPH
— HomeMadeGarbage (@H0meMadeGarbage) March 5, 2026
足つき倒立振子なら足モータのトルク負荷などで空中判定してゲインを調整できそうだけどね。
おわりに
ここでは車輪倒立振子のジャンプ着地について検証しました。
ジャンプ時にモータ回転の制御フィードバックゲインを小さくすることで着地倒立ができることが分かりました。
着地後の姿勢復帰や衝撃に耐えるためにモータトルクも大きめに必要になるとは思います。
今回の結論も最終的には足つき倒立振子が最適であるという結論になりました。
足の接地具合いを検知して制御ゲインが調整できますものね。
倒立振子
かわいい#SImpleFOC #BLDC pic.twitter.com/EyCM4Vrju2— HomeMadeGarbage (@H0meMadeGarbage) March 6, 2026
次は足つき機体の製作になると思います。
誰がこんなたくさんの倒立振子に囲まれると思いますか pic.twitter.com/alQdBivjqv
— HomeMadeGarbage (@H0meMadeGarbage) March 4, 2026