合体ロボに憧れて4
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2025 |19日目
前回は2輪倒立振子のボディ平行維持インテリジェンス制御の検討を実施しました。
今回はいよいよ合体について検証します。

目次
コネクタ機構
合体の接合部の機構を考えます。
切り離しも考慮して直下的に磁石で行こうと思いました。
今はあまり見なくなったけど以前は100均にたくさん売ってたネオジム磁石を使う。

簡単なコネクタを作って検証
LEDと電池が接合して発光するのを確認できました。
合体ロボに憧れて pic.twitter.com/2EVToZBCME
— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2025
コネクタの電極には銅箔テープを使用した
切り離しにはサーボを使用します。
合体ロボに憧れて pic.twitter.com/aJdF6qRfUl
— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2025
良い結果を得たので、ネオジムと銅箔テープそしてサーボによる接合機構で合体ロボの製作を進めることにします。
合体ロボに憧れて
ランデヴー pic.twitter.com/kRoCOeD8EW— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2025
CAN通信
合体電極はCAN通信の2信号とします。
通信の有無で結合判定して、合体時の動作同期もCAN通信でいけるのはと考えました。
CANであれば差動信号通信ですので電源共通化の必要もなく(まぁ耐圧超えるような電位差は発生しないでしょという考え)、 2電極で接合部が実現できます。
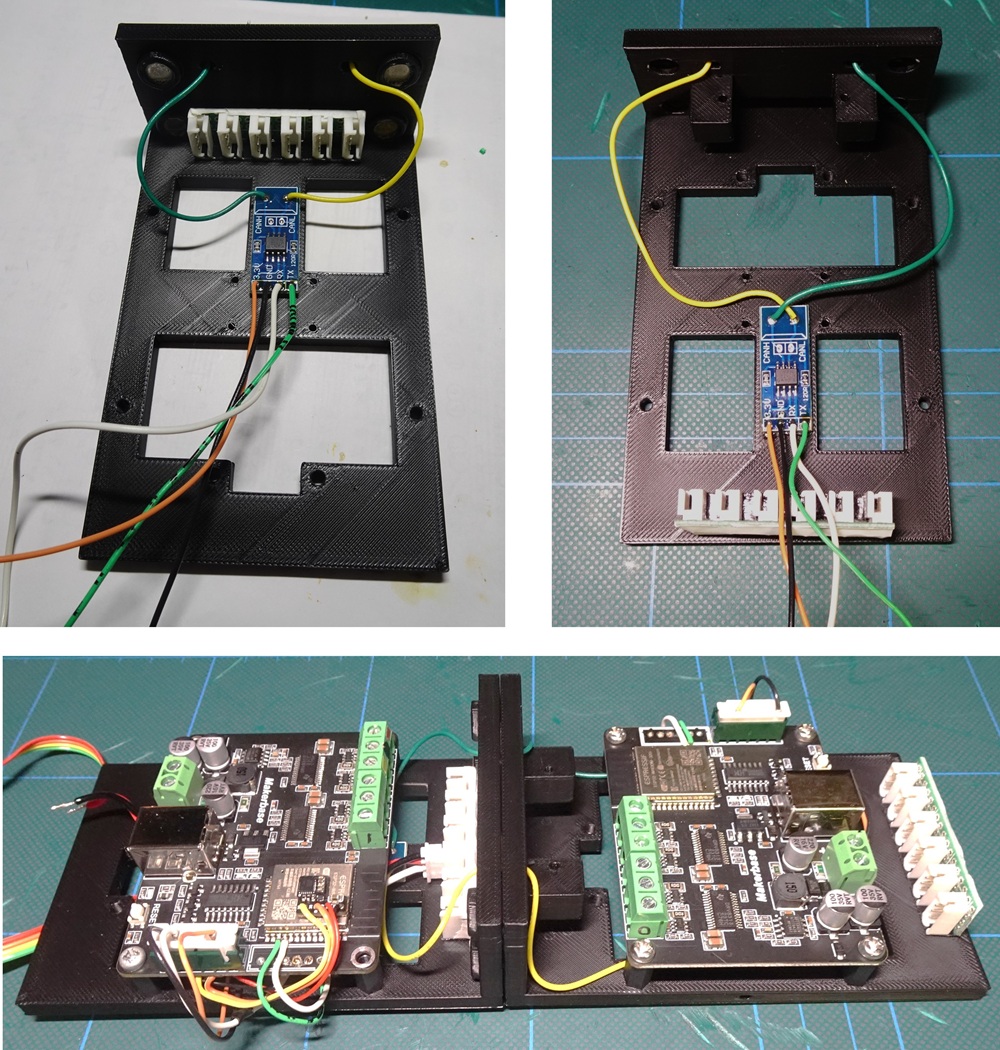
SN65HVD230搭載のCANモジュールを使用

CAN通信の有無での接合判定動作も確認できました!
合体電極はCANの2信号とした
通信有無で結合判定CANなら差動だから電源共通化の必要ないし
合体時の動作同期もCAN通信でいけるのはと考えている
さてどうなるか pic.twitter.com/zoPoZccPqY— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2025
倒立振子ロボに電極を盛り込んで接合実験を実施
合体コネクタ検証
接続で4脚モード
切り離しで再び2輪倒立モード図らずも電極が目、バッテリが口みたいになってカワイイ pic.twitter.com/NlSbA4NyVY
— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2025
接続で4脚モードとなり倒立動作を止めて、切り離しで再び2輪倒立モードとなるスムーズな動作モード移行も実現できました。
2台目製作
合体コネクタ機構も実現できましたので2台目の倒立振子ロボを製作します。

ほぼ1台目と同じ構成ですが、2台目には接続切り離し用のサーボが追加されます。
サーボモータ pic.twitter.com/I9jBDWXQD9
— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2025
足駆動用サーボSTS3032も問題なく動作
STS3032 pic.twitter.com/EZ06eVuaFn
— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2025
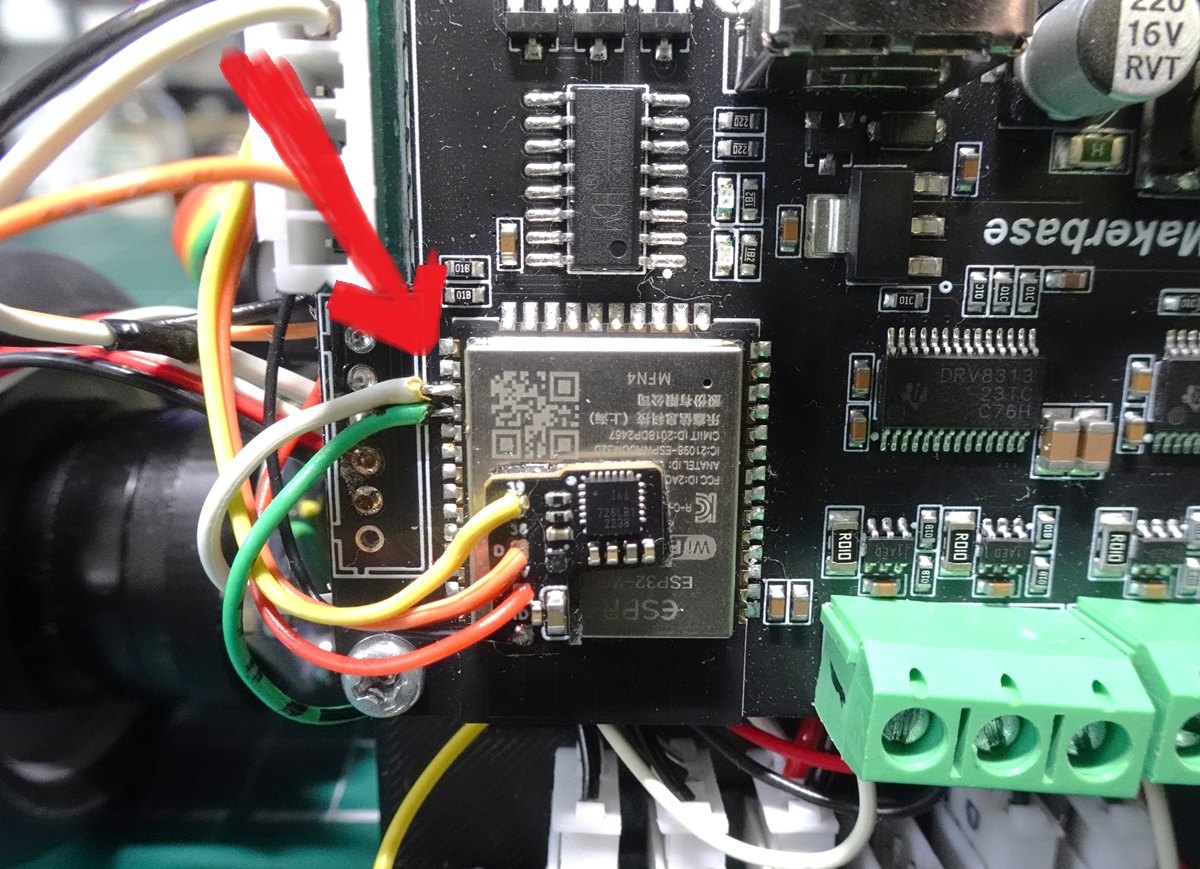
ちなみにコントローラ基板にはMKS MINI FOC V1.0 を使用しているのですが、ブラシレスモータやエンコーダのほかに足用サーボやCANモジュールをつないでおりピンが足りないので以下のようにフローティングピン(IO16, 17:CAN入力)も活用してます。
無事に2台目も完成しました。(∩´∀`)∩ワーイ
誰がこんなたくさんの倒立振子に囲まれると思いまっか pic.twitter.com/o3pcsqzn0P
— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2025
合体動作
双方にCAN通信による接合判定機能を追加して動作確認
合体ロボに憧れて pic.twitter.com/qWrCRKzhfG
— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2025
無事に接合と切断動作を実現できました!
CAN通信ボーレートは1Mbps。手製のコネクタで高速通信が実現できました。
それぞれの倒立動作モード切替も問題なくできました。
おわりに
ここでは合体ロボの接合コネクタの検証をして合体動作を確認しました。
2台目の倒立ロボも完成し 合体まで実現できましたので、次回は合体後の4脚モード動作について考えます。
ではまた