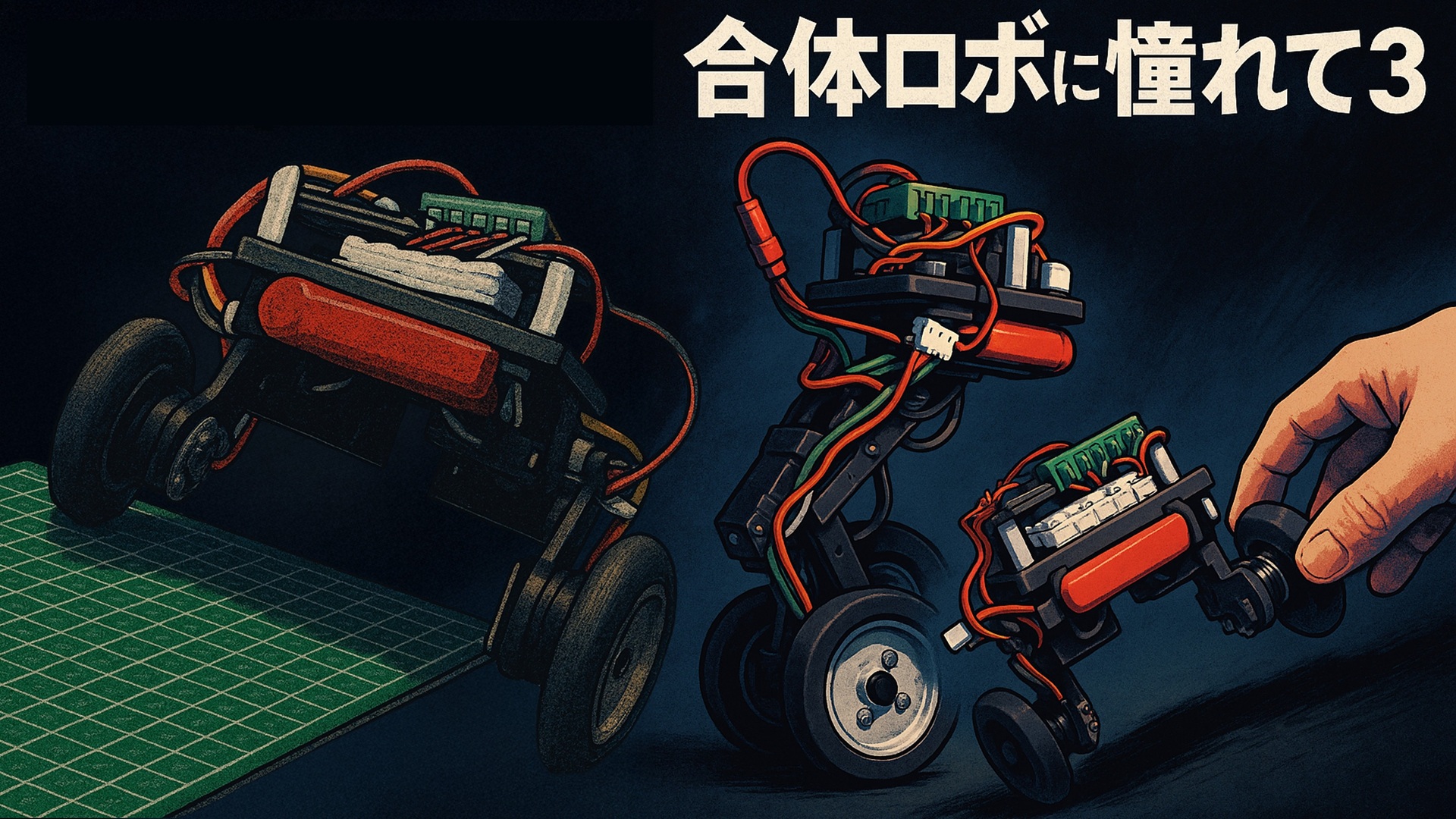
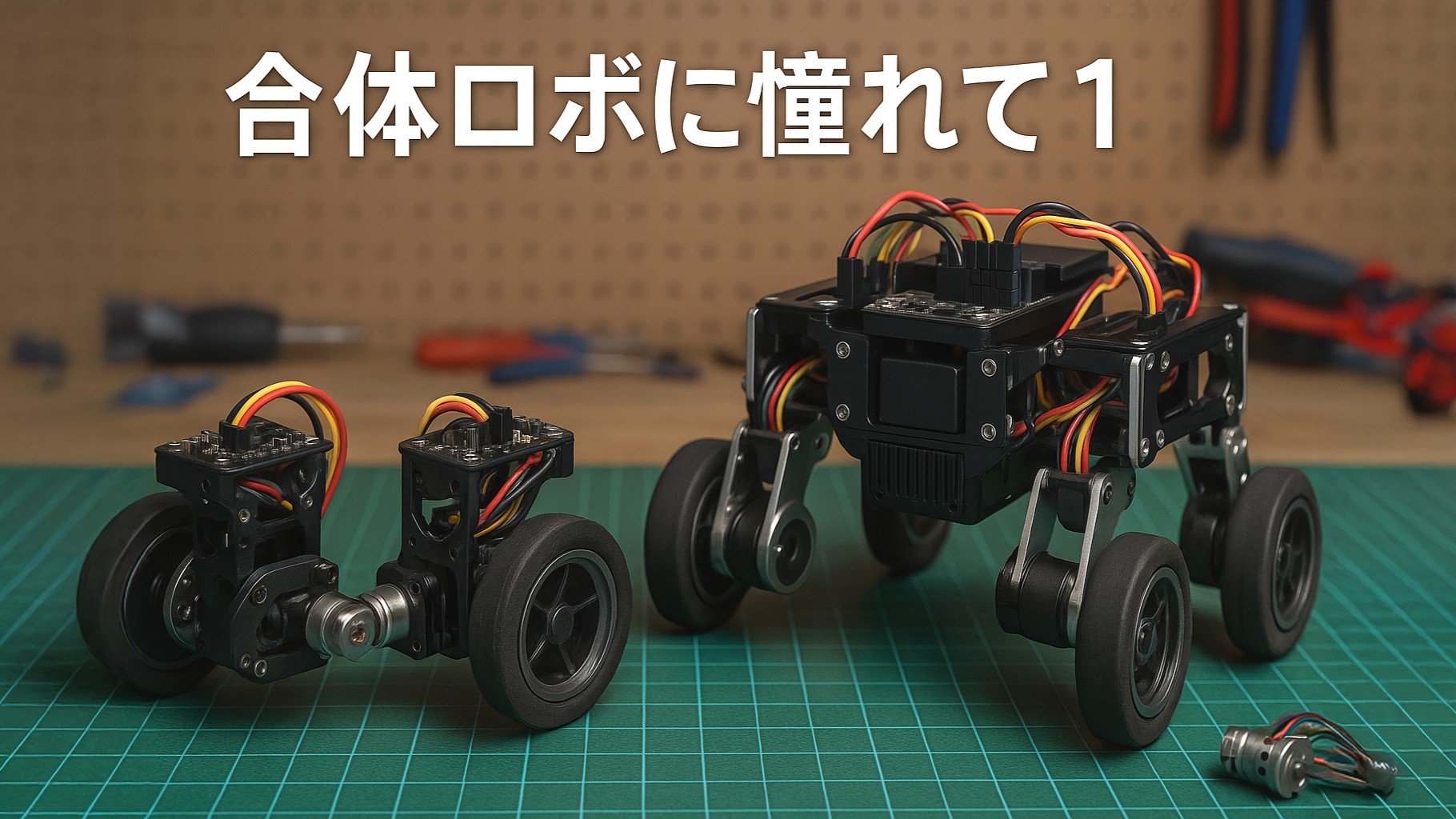
合体ロボに憧れて5
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2025 |21日目
前回は合体ロボの接合コネクタの検証をして合体動作を確認しました。
ここでは合体後の4脚ロボモードの動作を考えます。

目次
4脚モード
合体コネクタに2個の電極を設けてCANの信号線としており、CAN通信の有無で合体を判定しています。
4脚モード揉むか pic.twitter.com/facFD62AYF
— HomeMadeGarbage (@H0meMadeGarbage) December 17, 2025
上の動画で合体後に足高さが変わって屈伸していますが、これはそれぞれのコントローラで動かしているだけです。

4脚モードでは一方のコントローラで動作制御させたいです。
そこでCANを合体接続判定以外にも他方の接続先のロボの制御にも使用します。
4脚モードでは以下のようにCAN IDを定めて1号機からCAN信号を2号機に送って動作を同期させます。
・0x201 : [左ホイール速度, 右ホイール速度]
・0x301 : [左足 x, 左足 z]
・0x302 : [右足 x, 右足 z]
合体時のホイール動作と足同期動作を確認できました。
4脚モード pic.twitter.com/HrjZbGXjtr
— HomeMadeGarbage (@H0meMadeGarbage) December 18, 2025
ホイールや歩行での旋回動作も実現したかったのですが、接合が磁石によるものなので強度が足りず断念しました。。。
とにかくひねりに弱くて(´;ω;`)
— HomeMadeGarbage (@H0meMadeGarbage) December 18, 2025
接合部の強化は今後の課題ですね。
メカ的にロックしないとだめだな。
合体動作
個々の2輪倒立動作から合体して4脚モード動作を確認できました。
切断後の2輪倒立動作も問題がなくスムーズなモード移行ができております。
— HomeMadeGarbage (@H0meMadeGarbage) December 18, 2025
合体動作は自動化したいな。。
HomeMadeGarbage Tech
H1合体動作は自動化したいわ
俺がゲームもラジコンもしないからかコントロール難しい。。。 pic.twitter.com/YVqHCfXOIU— HomeMadeGarbage (@H0meMadeGarbage) December 20, 2025
おわりに
ここでは4脚ロボモードについて検証しました。
接合部の強度がなくゴリゴリに動かすのは難しかったですが、通信周りなど満足のいくシステムが構築できました。
次回は合体ロボの仕上げに入りたいと思います。
ほな