合体ロボに憧れて2
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2025 |15日目
前回はDirect Drive Technology社の「D1」に憧れて自分なりの合体ロボット実現に向けて倒立振子の製作を開始いたしました。
ジンバル用小型BLDCによる倒立動作と足駆動用のシリアルサーボモータ STS3032の基本動作を確認いたしました。


目次
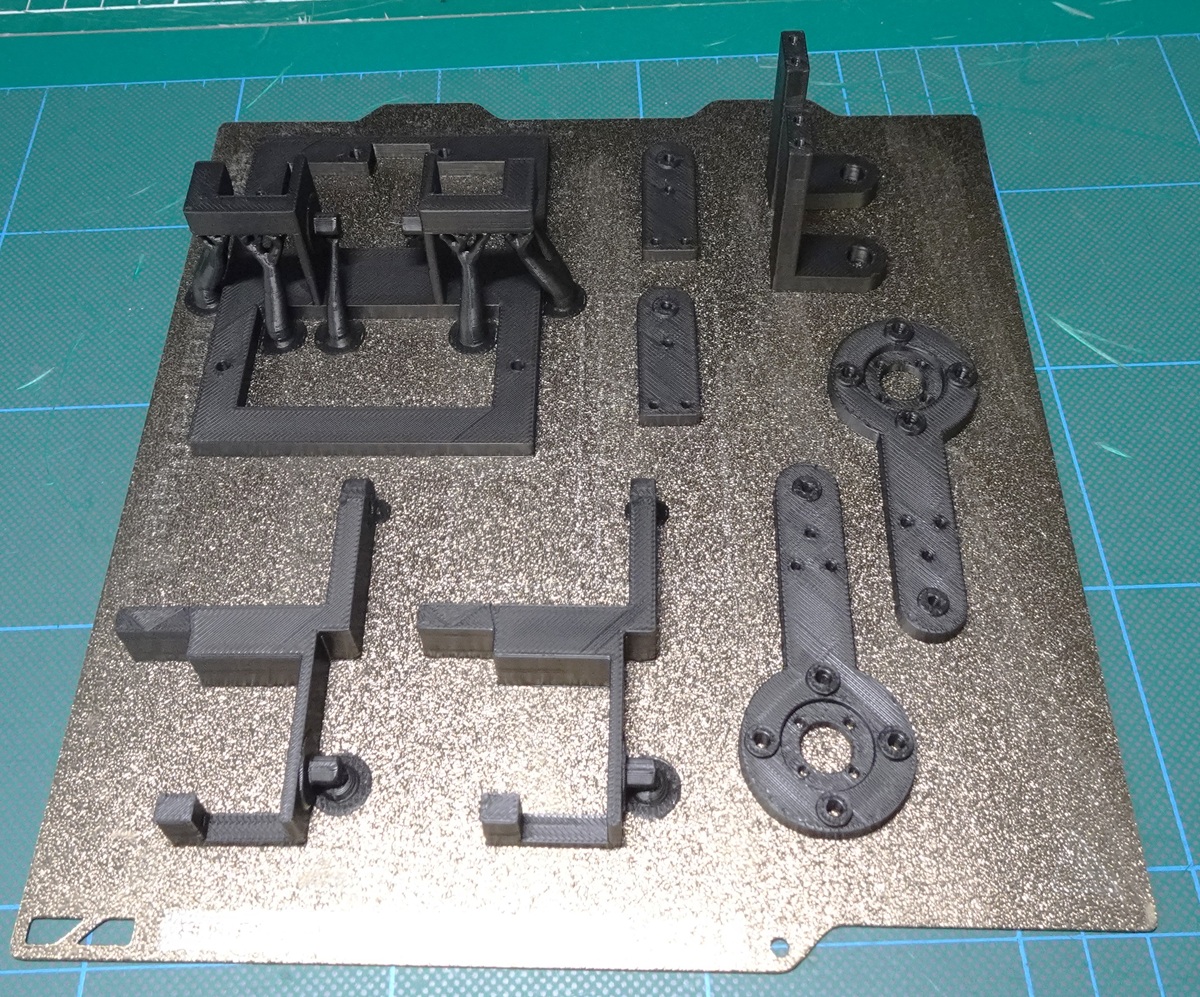
足製作
シリアルサーボでシリアルリンク機構の足を実現します。
筐体を3Dプリント
足を組んでPS4コントローラでアクティブ動作
足腰げんき教室 pic.twitter.com/hS6stkgYad
— HomeMadeGarbage (@H0meMadeGarbage) December 11, 2025
股関節とヒザにサーボを載せた1脚2軸の足 (合計サーボ 4個) を構築しました。
足先にはBLDCを載せています。
STS3032 pic.twitter.com/vWnccrn8AO
— HomeMadeGarbage (@H0meMadeGarbage) December 11, 2025
倒立動作
タイヤをつけて早速倒立させてみました。
初めてのシリアルリンク足の倒立振子
足高さ変えると重心変るもんね
今は倒立目標角シフトで追従させてるけど
合体見据えるとボディは平行維持したい足高さによる重心シフトを補うように足の前後位置で補正するようなインテリジェンス制御導入したいね… pic.twitter.com/zlNyarVajf
— HomeMadeGarbage (@H0meMadeGarbage) December 11, 2025
いろいろ調整は必要ですが、足を動かしつつの倒立が一応確認できました。
足高さを変えると重心が如実に変化するのが倒立動作でよくわかります。
現状では倒立目標角シフトで追従させているが、合体を見据えるとボディ常に平行維持させたい。
足高さ変異や地面傾きによる重心シフトを補うように足の位置で補正するようなインテリジェンス制御を開発したいです。
移動動作
ボデイの傾きを常に保つインテリジェンス制御はまだ難しいので
一旦 手動で極力ボディが平行を保てる足前後位置を調整して移動動作を確認しました。
倒立振子 pic.twitter.com/bFz0rSshzS
— HomeMadeGarbage (@H0meMadeGarbage) December 12, 2025
少量の高さシフトには追従できてます。
ゆっくり移行すれば、そこそこの高さを実現できてます。
かなりの倒立振子. pic.twitter.com/amZxtCy5PL
— HomeMadeGarbage (@H0meMadeGarbage) December 12, 2025
やはり自動的に足位置を変えてボディの平行維持を実現するインテリジェンス制御手法の開発が必要そうです。
おわりに
ここではシリアルサーボSTS3032を用いて足機構を製作して、倒立ロボ動作の確認を行いました。
足をもっと元気に躍動させつつ最終目標の合体のためのボディ平行維持には、ワンランク上の制御が必要そうです。
次回はインテリジェンス制御について考えていきたいと思います。