
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
本記事にはアフィリエイト広告が含まれます。
久々に姿勢制御モジュールの4段倒立に挑戦しました。
前回の倒立時間は31秒でした。今回はそれ以上を目指します。
姿勢制御装置 4段倒立 記録
配信アーカイブは以下https://t.co/KlH6XuFuWA pic.twitter.com/jmaHrOD5O5
— HomeMadeGarbage (@H0meMadeGarbage) November 28, 2021
目次
前回の課題
姿勢制御装置 4段倒立 次回記録会までの課題
配信アーカイブは以下https://t.co/KlH6XuX5O8 pic.twitter.com/aFSufvFB3F
— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2021
前回の時点で3段倒立までは非常に安定しておりましたが、3段目に載せているSHISEGYO-1 Jr.のホイールのトルクが足りないかなと感じていました。
このトルク増加によって4段目のSHISEIGYO-1 DCの積載の影響が減り安定するのではと予想しました。
調整
前回の課題なども考慮しつつ諸々調整しました。
SHISEIGYO-1 DC 底面調整
SHISEIGYO-1 DCの底を滑りにくくするためにTPUフィラメント製にしました。
大変滑りにくくなりました。
— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2021
SHISEIGYO-1 Jr. ホイールトルク調整
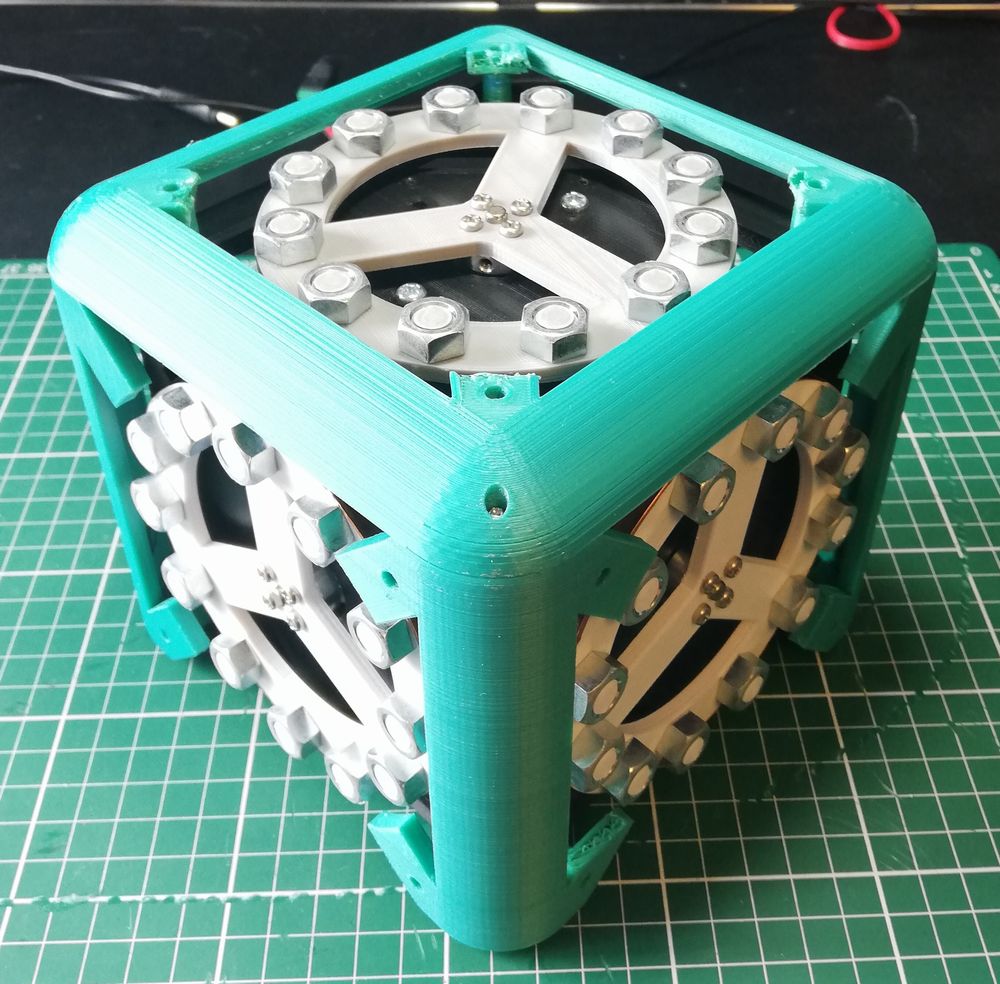
前回からの課題であったSHISEGYO-1 Jr.のホイールのトルク不足を解消するために、ナットを増やしました。
この変更によってホイール質量は28g から 50g になりました。
安定性が増して3重で25分以上の倒立が実現できました。
SHISEIGYO-1 the END 重量調整
一番下の姿勢制御モジュール SHISEIGYO-1 the ENDの重量を増して安定化をはかりました。
1軸なので使用しないのですが、ホイールを2個追加でして増量しました。
記録会
上記調整を施して記録会実施しました。
47秒の4重倒立を達成しました!
再調整
記録会からまたまた気になる点が出てきたので再調整します。
記録会では倒立崩壊時に下から2番目のSHISEIGYO-1の制御が乱れた印象を受けました。
恐らくSHISEGYO-1 Jr.のトルク向上のためにホイール重量を増したことが影響したのだと思います。
SHISEIGYO-1 Jr. ホイールトルク再調整
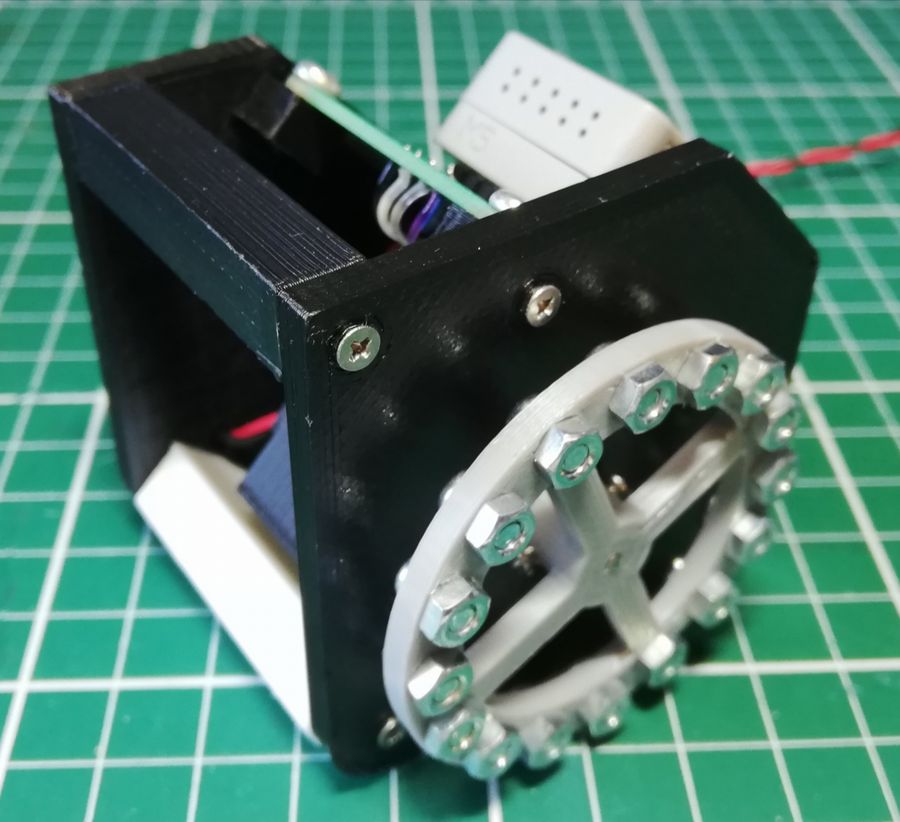
SHISEGYO-1 Jr.のホイール重量を増やし過ぎたため少し減らします。
3重だったナットを2重にしました。

この変更によってホイール質量は50g から 43g になりました。
SHISEIGYO-1 DC ホイールトルク再調整
下から2番目のSHISEIGYO-1の負担をさらに減らすために1番上のSHISEIGYO-1 DCのホイールのネジを減らしました。

この変更によってホイール質量は22g から 15g になりました。
これでもSHISEIGYO-1 DC自身は問題なく倒立できることを確認しました。
再記録会
1分15秒の4重倒立を達成できました!!
バランスを持ち直す動作がかなりの頻度で出来ているので、もっと良い記録も目指せそうです。
置き方の鍛錬も進めたいと思います。
おわりに
今回の調整によって30秒以上の4重倒立は高い確率で実現できるようになりました。
置き方など研究して更なる高みを目指したいと思います!
次の記事

関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
姿勢制御モジュール 4重倒立挑戦2 ーリアクションホイールへの道48ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー