シン SHISEIGYO-1 Walker の開発2
本記事にはアフィリエイト広告が含まれます。
前回は PWMマイクロサーボと低価格ブラシレスモータによるリアクションホイールバランス2足歩行ロボット (シン SHISEIGYO-1 Walker) の製作を開始いたしました。
↓低価格なのに高精度・高トルクのPWMマイクロサーボ PTK 7465 MG

低価格ブラシレスモータ 5010 360KV

製作を進めましたの報告いたします。

目次
スタンドアロン化
前回までの状況では 電源は外部給電で、歩行シーケンスも外部からUDPでロボに送信して動かしておりました。
2足歩行ロボット
見事な歩行と言えよう pic.twitter.com/gOmBwMagpW— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2025
ここでは電源も歩行シーケンスもロボに内蔵させて単体動作を目指します。
モーションシーケンス内蔵
モーションシーケンスはモータコントローラ基板に搭載ESP32をAPとしてWiFiで
もぐりこんでブラウザでモーションシーケンスを書き込めるようにしました。
ESP32をAPとしてWiFiでもぐりこんで
ブラウザでモーションシーケンスを書き込めるようにした。住みよい環境
もう何も怖くない https://t.co/I0d9xaKMJU pic.twitter.com/GR4rAj6Tmb— HomeMadeGarbage (@H0meMadeGarbage) November 23, 2025
Motion Editor欄に
左前後[mm]、左高さ[mm]、左ロール[deg]、右前後[mm]、右高さ[mm]、右ロール[deg]、デュレーションタイム [msec]
記載で動作を構築できるようにしました。
結構便利。
電源システム
電源は以下のような構成にします。
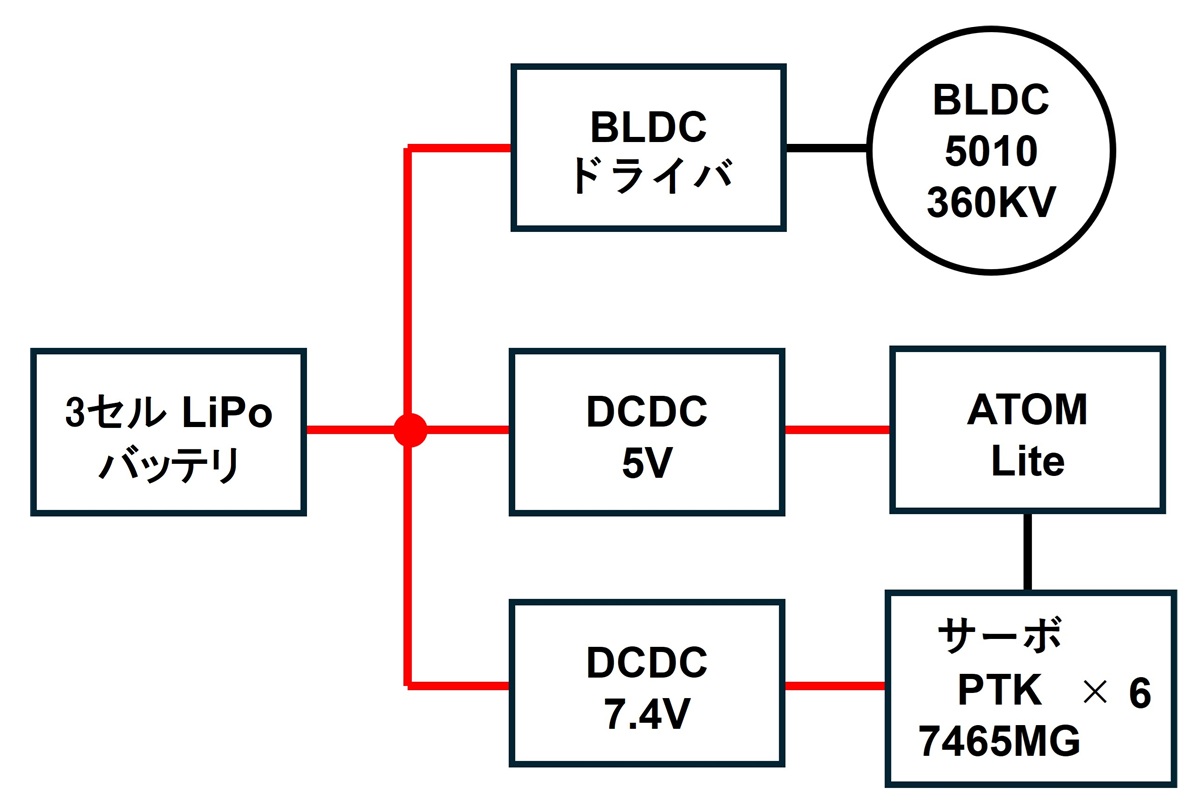
- 3セル LiPoバッテリ 11.1V
- DCDC 5V
- DCDCモジュール 7.4V出力に調整して使用

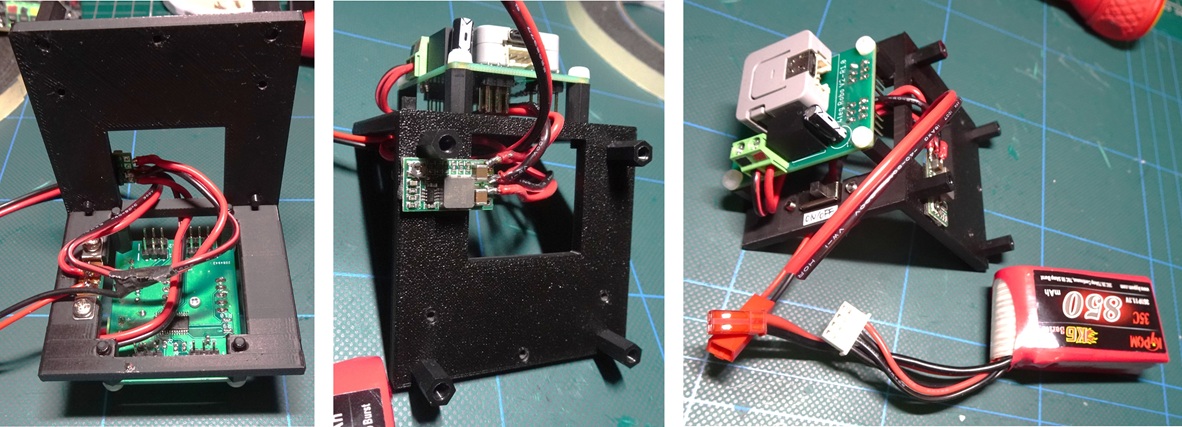
とにかく組んだ
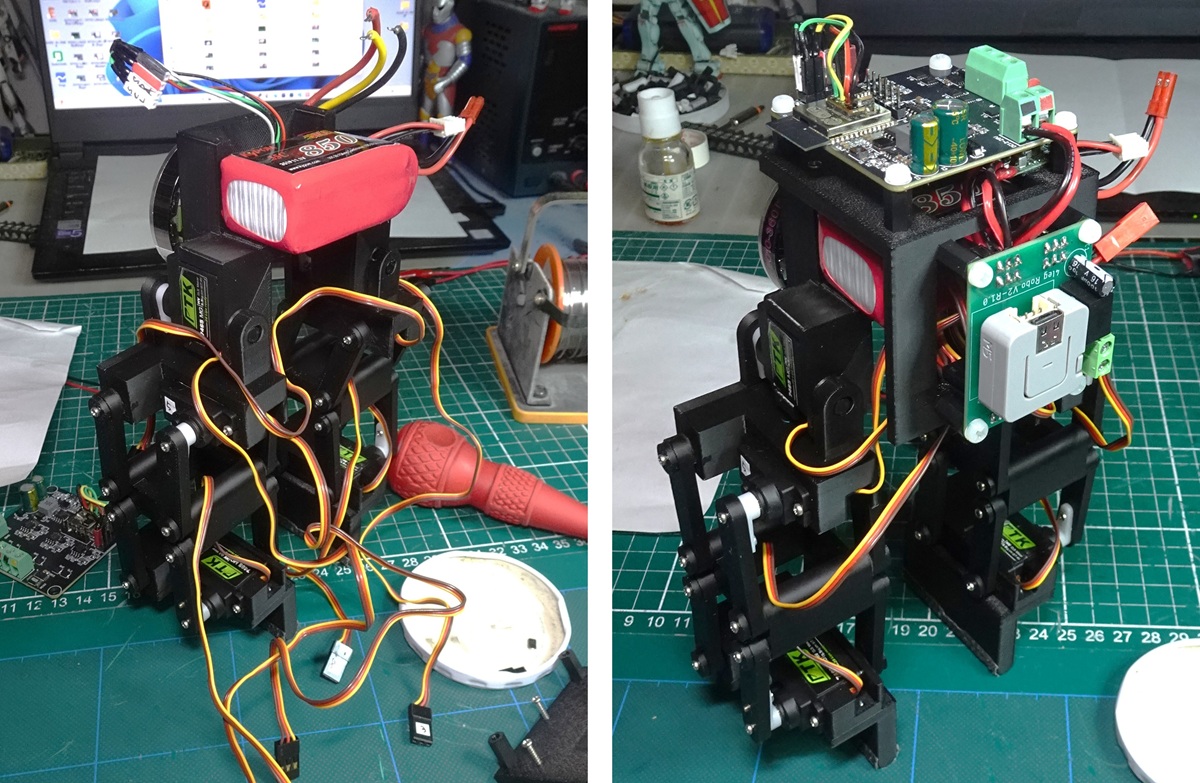
完成
無事にスタンドアロン化できました。
まさに独り立ち!
文字通りスタンドアロンで動けるようになったぜ
もう少しスタスタと歩いてくれまいか pic.twitter.com/YWkGM4mmIb— HomeMadeGarbage (@H0meMadeGarbage) November 23, 2025
歩行安定化
さらにロボをブラッシュアップさせます。
フライホイールが重たいので径を拡大して軽量化します。
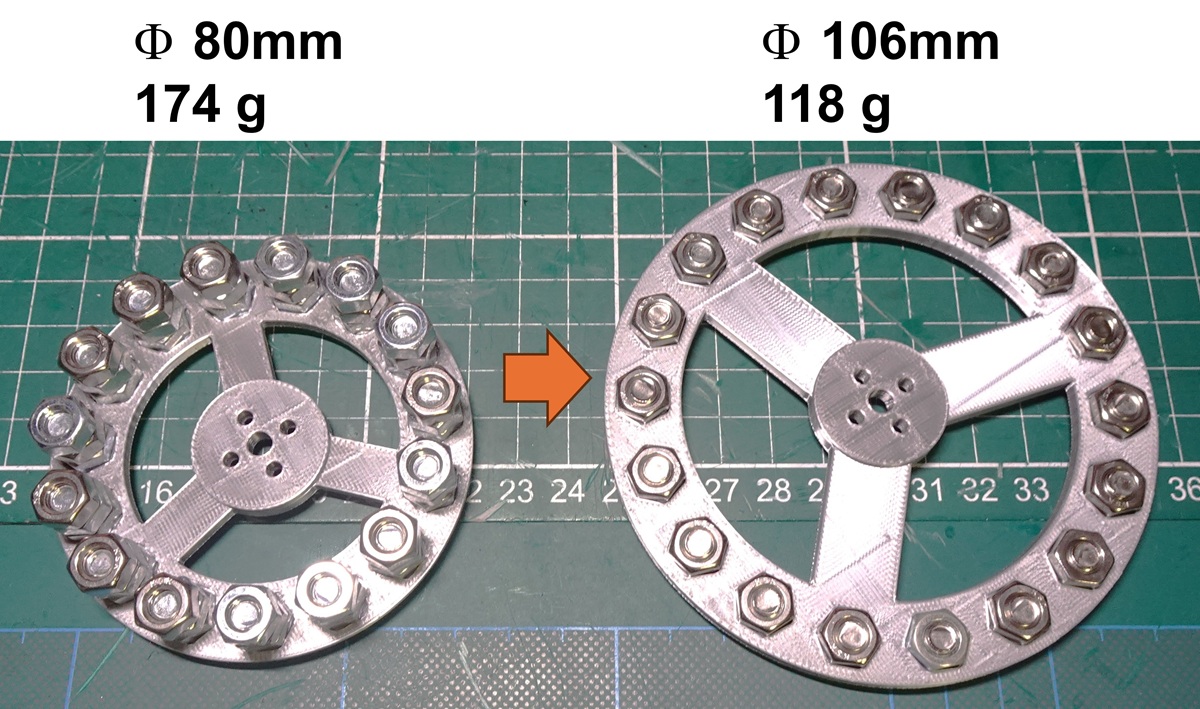
軽量化によってモータの負担も減っていい感じ
ホイール径増加に伴って気品も増した
バッテリ充電器壊れたので電源は外部供給
歩行最適化はまた今度 https://t.co/OoSj7mK9F7 pic.twitter.com/5VZrfp95dq— HomeMadeGarbage (@H0meMadeGarbage) November 24, 2025
まぁ遅いけどね。。
歩行速度 8.7 mm/s pic.twitter.com/q5arudIlkm
— HomeMadeGarbage (@H0meMadeGarbage) November 25, 2025
おわりに
ここではPWMサーボとSimpleFOCによるリアクションホイールで2足歩行ロボットを製作いたしました。
サーボ PTK 7465 MG の精度とトルクそしてSimpleFOCの有用性を感じることのできる秀作となりました。
足交差歩行は遅くてリスキー。。でもロマンがあるのよ。
無難に交差させないタイプも今度試してみようかな
— HomeMadeGarbage (@H0meMadeGarbage) November 24, 2025
まぁ気が向いたらね。