シン SHISEIGYO-1 Walker の開発1
本記事にはアフィリエイト広告が含まれます。
先日大変素晴らしいPWMマイクロサーボを見つけまして

低価格ですがトルク・精度申し分なく 4脚ロボットを作ったりしました。バク転もできます。
もうサーボモータを使用した工作はないかなと思っていたのですが、
このPTK 7465 MG によって景色がまったく変わったのです。
いろいろなモードをたてて楽しむ pic.twitter.com/YfMqvAx9ti
— HomeMadeGarbage (@H0meMadeGarbage) October 13, 2025

目次
PTK 7465 MG インスピレーション
PTK 7465 MGの価格・サイズ・精度・トルクをもってすれば色々と可能性がひろがるなと
以前製作したSHISEIGYO-1 Walker をより小型により低価格で製作できないかと考えました。
エレガントにバッテリ搭載してコードレス化
ちょっと苦しそう pic.twitter.com/WKh5gNq9wr— HomeMadeGarbage (@H0meMadeGarbage) November 6, 2023
今ならホイール駆動のブラシレスモータについても手持ちの選択肢がたくさんあるので製作することに決定致しました。
足製作
PTK 7465 MG によるシン SHISEIGYO-1 Walker の足を検討します。
平行リンクを採用。
うんうん pic.twitter.com/NBiY0raaeO
— HomeMadeGarbage (@H0meMadeGarbage) November 3, 2025
サーボ2個で足上下前後移動を実現させます。
— HomeMadeGarbage (@H0meMadeGarbage) November 3, 2025
ロール軸も加えて1脚で3軸の足となります。
サーボの制御コントローラには実に素晴らしい以下を使用
M5Stack ATOMを搭載できます。
ミニロボ pic.twitter.com/JkhtFgTm84
— HomeMadeGarbage (@H0meMadeGarbage) November 4, 2025
リアクションホイール検討
リアクションホイールの制御は以下の姿勢制御モジュールを踏襲することにします。
コントローラはMKS ESP32 FOC V2

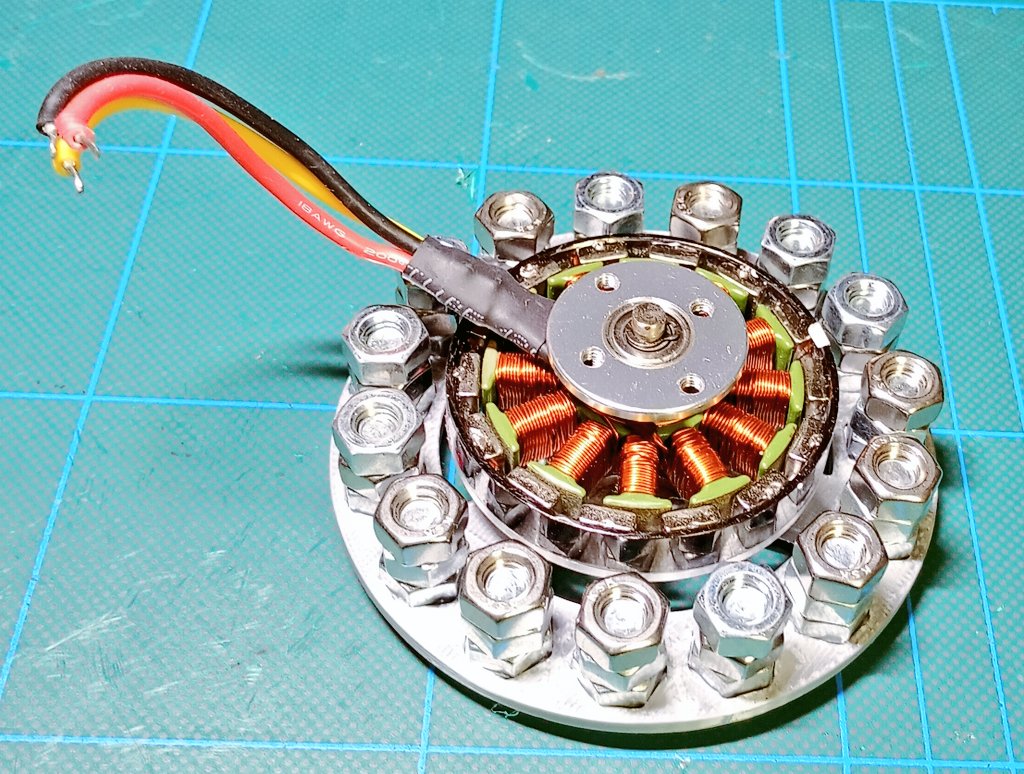
ブラシレスモータは 5010 360KV

エンコーダはコレ
IMUは壊れたATOMS3からMPU6886基板を摘出してMKS ESP32 FOC V2に搭載 (I2C)
この構成でリアクションホイール倒立動作を確認
ブラシレスモータにねじを重りとしたホイールをつけています。
スペーサー55mm pic.twitter.com/PjFRmNRqFM
— HomeMadeGarbage (@H0meMadeGarbage) November 7, 2025
スペーサ長 90mmまでイケた
今回も真心こめてパラメータ調整させていただきました pic.twitter.com/RIA1Jd7Cgk
— HomeMadeGarbage (@H0meMadeGarbage) November 7, 2025
シン SHISEIGYO-1 Walker 製作
リアクションホイールの構成も確定できたのでロボの製作に取り掛かります。
足先をブレード状にしました。
— HomeMadeGarbage (@H0meMadeGarbage) November 7, 2025
リアクションホイール搭載。無事倒立
もうすこし電流流せるドライバ欲しいな。。 pic.twitter.com/lKEPIzrMWL
— HomeMadeGarbage (@H0meMadeGarbage) November 8, 2025
しかし、少しダイナミックめに足を動かすとすぐに転んでしまいます。。。
— HomeMadeGarbage (@H0meMadeGarbage) November 9, 2025
もう少しドライバに駆動能力が欲しいところ
MKS ESP32 FOC V2 には元気なパワトラ AP30H80Q が載っておりますが、ドライバ電源を内部のDCDC降圧12Vとしておりモータ供給電流に制限があります (すごくいいモジュールなんですけどねぇ 2個駆動できるし)。
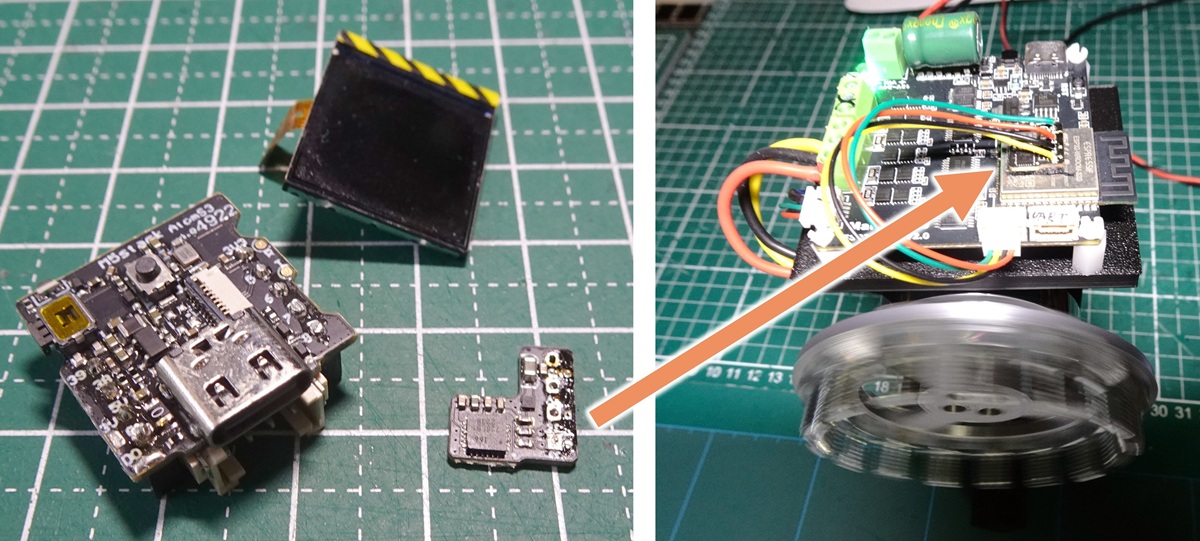
シン・ブラシレスモータドライバ
もっとパワーのあるドライバ欲しかったので Aliexpress サーフィンして以下を見つけました。
ESP32搭載のハイパワードライバ

¥2,150と非常に安かったので購入してみました。
のちにこの異常な安さの理由がわかることになります。。
こちらのドライバを手に入れたのはいいのですが、全く情報がなくピン配も謎。。。
どこの誰が作ったんやコレ???
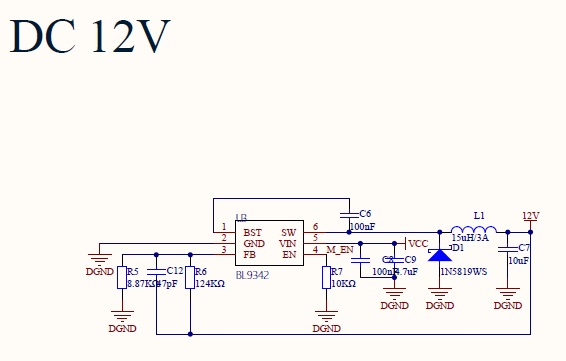
仕方ないので目視やテスタで基板を追いかけて回路構成を把握しました。
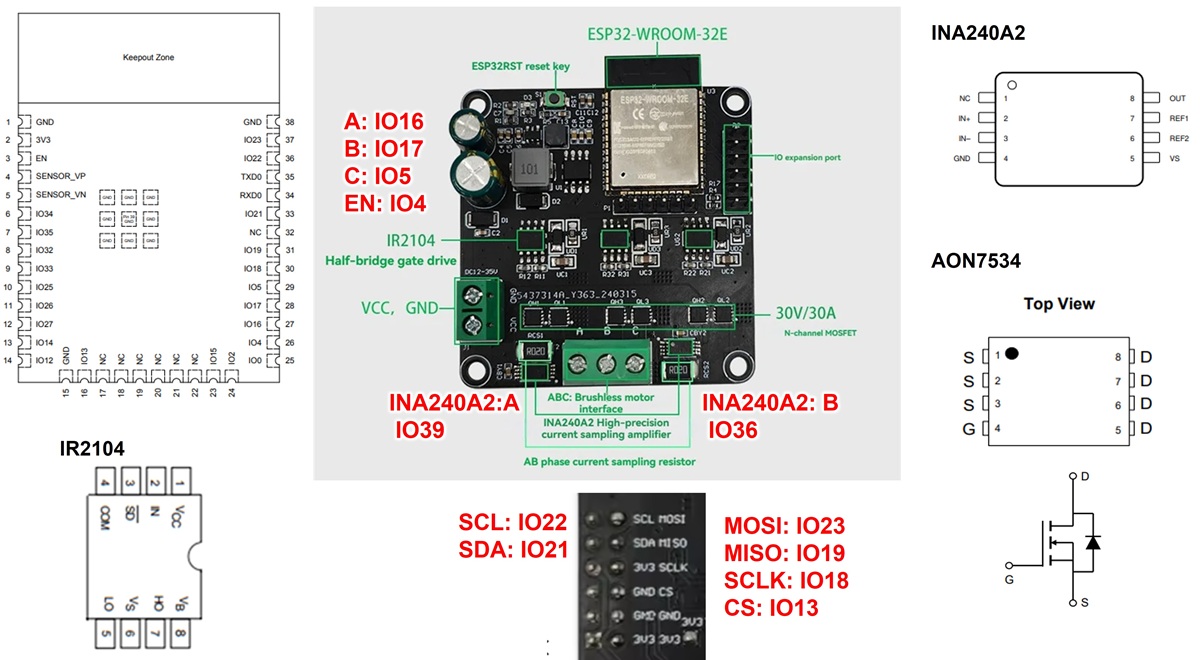
I2Cなどの外部IOも潤沢にあるのでエンコーダやIMUの接続も問題なしです。
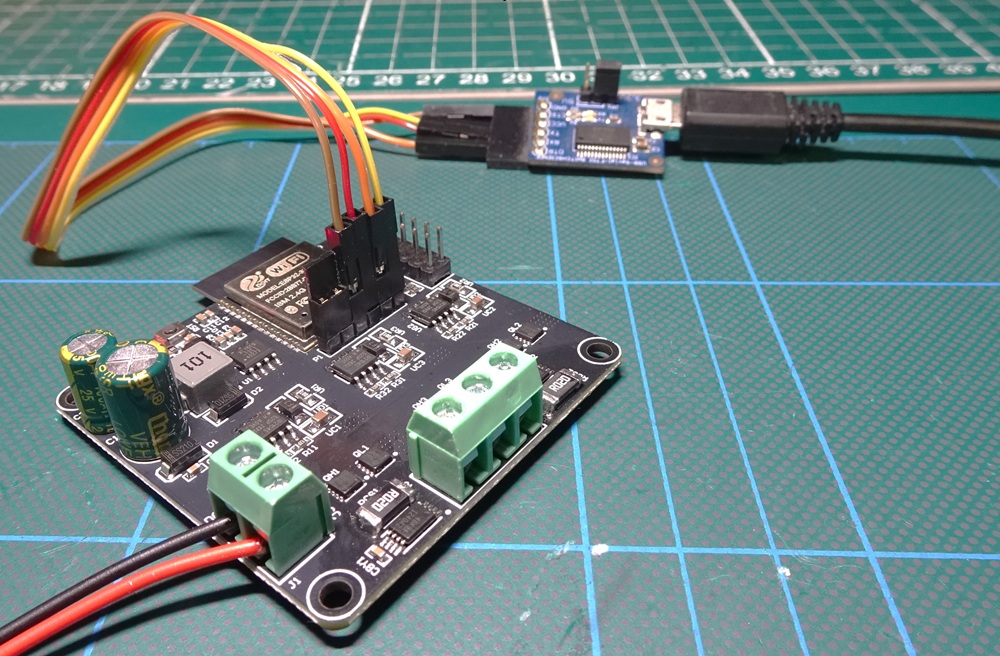
ESP32書き込み用のピンからUSBシリアル変換モジュールを介して書き込みます。
書き込む際はピンのIO0をGNDにします。
早速 SimpleFOCライブラリを用いてベクトル制御(FOC)でモータを回転させるコードを書き込んでみましたが。。。
モータとエンコーダはバッチリ動いた
カレントセンスがうまくいかないなんでだ?? pic.twitter.com/HcKqZSZECh— HomeMadeGarbage (@H0meMadeGarbage) November 18, 2025
電流センサの初期化がうまくできず動作しませんでした。
モータ駆動やエンコーダの初期化は問題ないようです。
仕方ないので電流センサを使用しないクローズドループでモータを回転させて、
電流センサの出力を観測してみました。
電流センサがうまく動かないのでベクトル制御はあきらめてクローズドループで回転させつつ
モータ電流を観測A相の電流がまともに測れないことが判明
なんでだろう?ピン間違えたかな?
ゆっくり心を整えて調べ直す pic.twitter.com/4mnbq41co9— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2025
モータA相の電流が測れていませんでした。。壊れるんだわ電流センサ INA240A2 が。。。
MKS ESP32 FOC V2にも電流センサ INA240A2 が載っており、パワトラを燃やして壊してしまった基板があったので電流センサを拝借してシン・ドライバに載せ替えました。
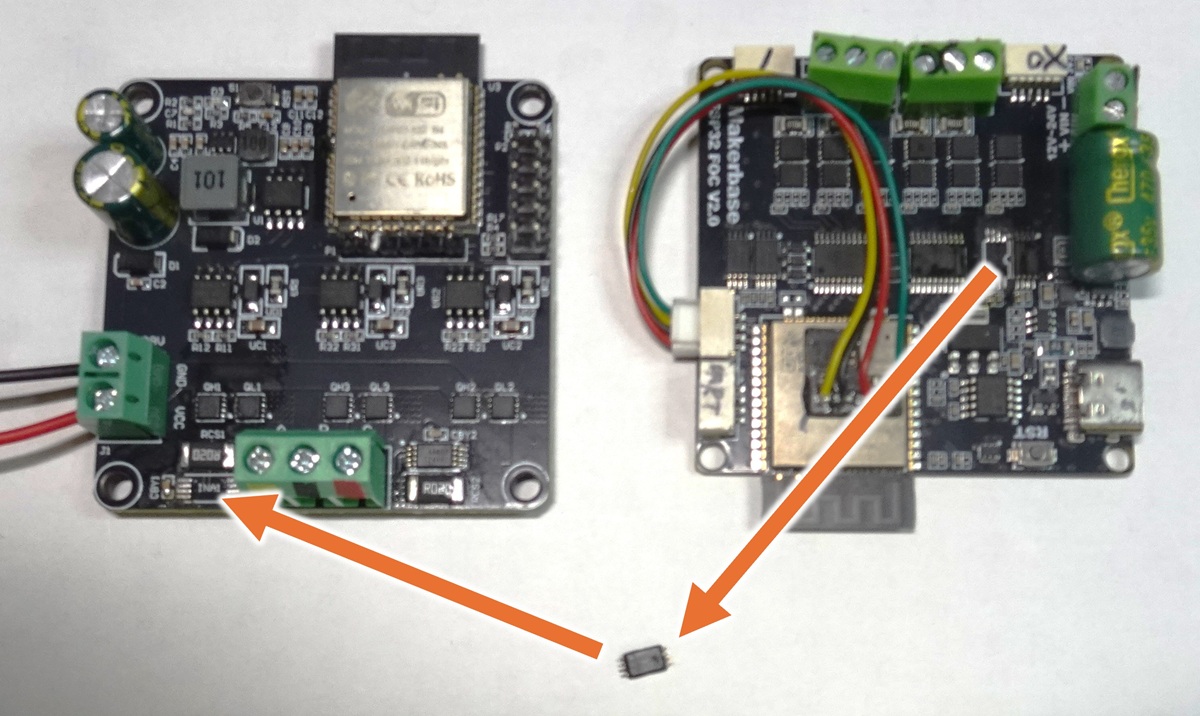
電流センサを載せ替えたところ無事にA相の電流も検知できるようになりました。
電流センサ載せ替えたら直った
これ不良品だったから安かったんだろうなぁ。。。 https://t.co/gB3kW5I7ty pic.twitter.com/42ckT9ACHL— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2025
これ不良品だから安かったんやろうなぁ(´;ω;`)。今 価格¥3,500とかだし。。
電流センサもなおってベクトル制御でのリアクションホイール倒立も確認できました。
FOC 速度制御モード pic.twitter.com/RdoPha0VTZ
— HomeMadeGarbage (@H0meMadeGarbage) November 19, 2025
20A級のハイパワードライバということで非常に元気です。
シン SHISEIGYO-1 Walker 再製作
修理したシン・ドライバで改めてロボの製作します。
robot pic.twitter.com/eKoFf82rhF
— HomeMadeGarbage (@H0meMadeGarbage) November 20, 2025
いい感じだ。
片足立ちも達成。
今日はここまで pic.twitter.com/3I4tbWrU2K
— HomeMadeGarbage (@H0meMadeGarbage) November 21, 2025
1歩前進!
2足歩行ロボット
バッチこい pic.twitter.com/7qSJX50uRG— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2025
シン・ドライバがハイパワーでホイールを元気に回せるので非常に順調
交互に1歩ずつの歩行も成功!
2足歩行ロボット
見事な歩行と言えよう pic.twitter.com/gOmBwMagpW— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2025
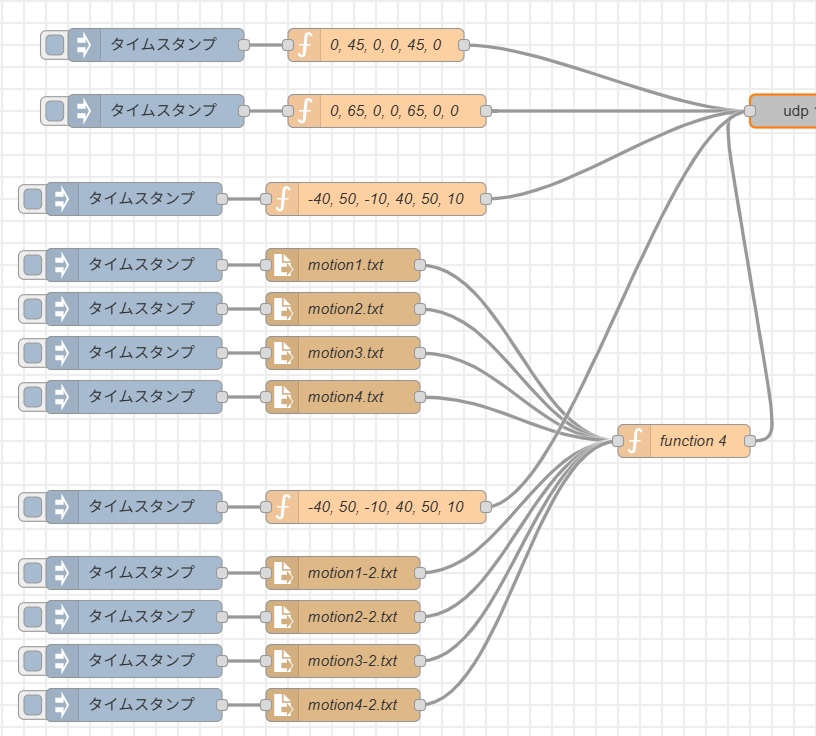
ちなみに歩行は動作シーケンスをUDPでロボに送信して動かしております。
PC (Node-RED)からUDPで足座標をロボットに一方的に送ってるだけなので、若干動作がガタガタしとりますが 無事に歩行達成。
おわりに
ここではPWMサーボによるSHISEIGYO-1 Walker の製作を実施しました。
素晴らしいサーボモータ PTK 7465 MG と色々ありましたがハイパワーのシン・モータドライバによって
小さいけどしっかり足を交差させて歩くシン SHISEIGYO-1 Walker が実現できました。
現状は動作シーケンスが外部からの送信だったり電源も外部給電なので、
次回はスタンドアローンでスイスイ歩けるように製作をさらに進めます。
ほな