競技用歩兵ロボットを自分なりに味見
本記事にはアフィリエイト広告が含まれます。
またオモシロをインターネットでみつけた
Make it bigger and put a 9mm submachine gun with low recoil on it. pic.twitter.com/5JcwZ9LSkZ
— Zhao DaShuai 东北进修🇨🇳 (@zhao_dashuai) December 3, 2025
中国の東北大学(Northeastern University of China)が開発した競技用 歩兵ロボットとのことで
めちゃくちゃかっけー ジャキッっと立つところがいいんだよねぇ
なんだか複雑な構造のように見受けられるけど。タイヤ周りは1軸の足つきホイールで簡易的にモデル化できるのではと思ったのでこの度 味見をしてみました。

目次
準備
冷蔵庫にあるものでサクッと試してみましょう。
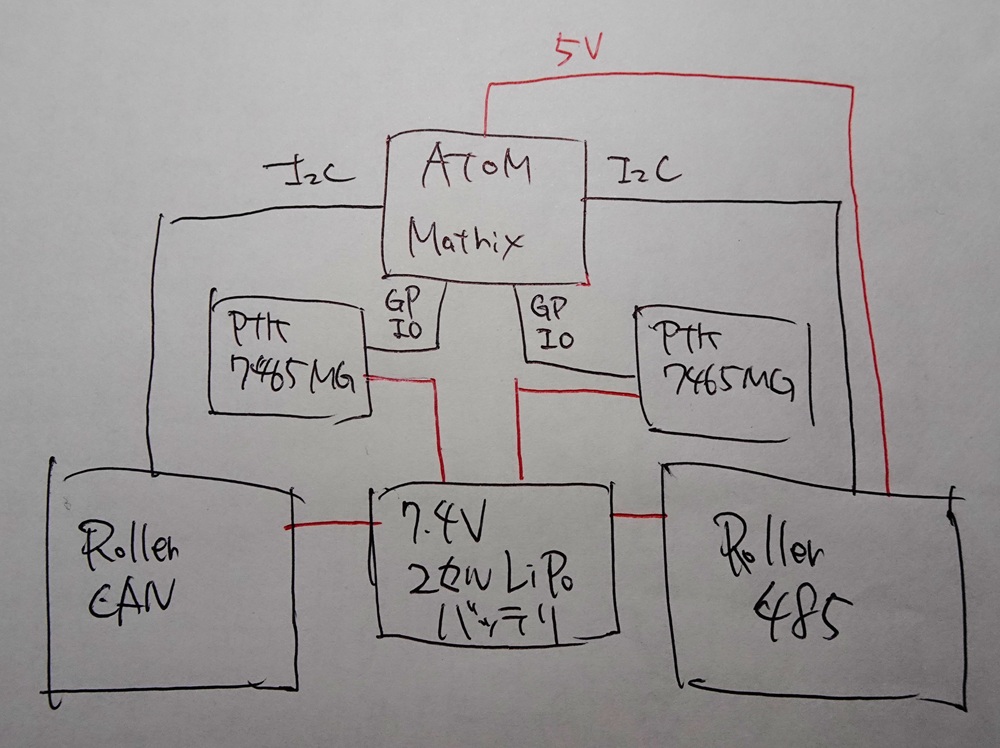
まずホイールとして 手元にあった Roller485 と RollerCAN を採用しました。
RS485もCAN通信も使わずI2Cで回すので機種の違いは問題にならないでしょう。
とりあえずこの2個のモータで倒立振子を構築。味見前の味見なので筐体は雑に段ボールでお試し
暫定 走行テスト pic.twitter.com/MOCxPu8gK7
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2026
問題なく倒立動作でけた。
コントローラは ATOM Matrix
ホイールは以下↓のフライホイールをそのまま使用
ホイールの1軸足駆動にはPWMマイクロサーボ PTK 7465 MG を採用
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2026
応答スピードも精度も申し分のない素晴らしいサーボです。
可動範囲は180°なので ほんとのところは360°サーボがよかったが
まぁ味見味見
ロボット製作
十分な下ごしらえができましたので、製作を進めます。
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2026
完成
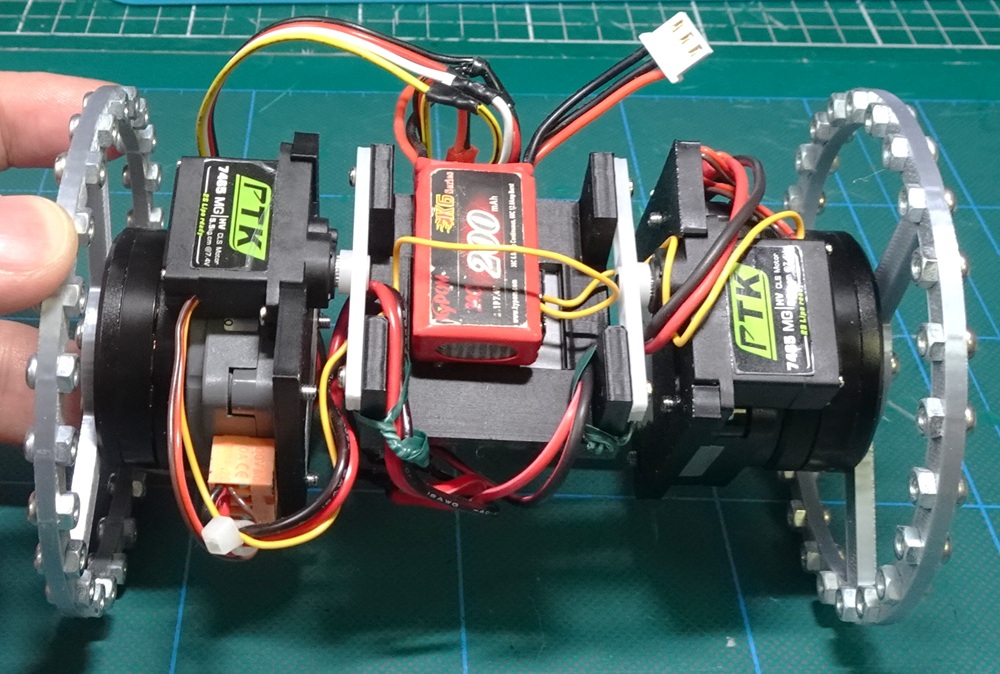
味見のつもりが配線に手こずりやっと完成
なるほどね かっこいい
微調整は明日のおかず 疲れた pic.twitter.com/0MPQl5gxvT— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2026
見事にジャキっと立ちました。
味見のつもりが駆動をともなう配線が意外と難しく製作に時間がかかりました。
実際に作ってみて気づきがあったので以下に記します。
気づき
作ってみて色々わかりました。
今回作った味見機体ではモータを反転させて立っているので、UpとDownでモータの並進 進行方向も反転します。
コントローラで制御する際にUpとDownで進行方向をソフト的に反転させました。
モータ回転方向は変わらないので回転系の制御には変更はありません。
本家実機は以下のようにチェーン駆動でUp/Down系の位置反転がないので一貫した制御で成り立っています。
また複雑なギア構造でUp/Down機構を実現しているので、駆動機器や配線が動くこともなく構成の妥当性も理解することができました。
じつに勉強になりました。
引き続き 動作味見
進行方向反転問題や配線の複雑さなど色々見えてきましたが、カッコいいUp/Down機構は実現できました。
構成




ロール軸 あれこれ
ホイールを足と見立てて モータ角度でロール角保持みたいなの
モータ角度でロール角保持みたいなの
イマイチだな
180°サーボで一方方向にしか動けないのでキツい
いつか360°サーボで pic.twitter.com/6H61XbPLC9— HomeMadeGarbage (@H0meMadeGarbage) February 2, 2026
イマイチだな..
180°サーボで一方方向にしか動けないのでキツい
いつか360°サーボで 本家ロボのように走行中も加速に応じてホイール ギュンギュンさせたい気持ちはある
おわりに
今回は競技用歩兵ロボットのジャキっと立つ感じを味見してみました。
倒立振子
変形 pic.twitter.com/rirESyVzAH— HomeMadeGarbage (@H0meMadeGarbage) February 2, 2026
思い付きでコレこうすれば簡単にできるんでない?とか思ってやってみると奥深さがぬぐってもぬぐっても取れないヌメりのようにあふれ出て襲いかかることがございます。
今回も大変に勉強になりました。