
6重倒立に向けて③ ーリアクションホイールへの道66ー
本記事にはアフィリエイト広告が含まれます。
前回は5重倒立の検証を実施しました。
ここでは遂に6重倒立に挑戦します。
目次
6重倒立
あらためて6重倒立に使用するモジュールについて記載します。
上から以下のように積み上げます。
- SHISEIGYO-1 DC XIAO
今回の6重倒立のためにマイコンにSeeed Studio XIAO ESP32S3 を採用して軽量化 - SHISEIGYO-1 DC
- SHISEIGYO-1 DC 280RA
今回の6重倒立のために新規開発 - SHISEIGYO-1 Jr.
- SHISEIGYO-1
- SHISEIGYO-1 the END
3軸モジュールを1軸にカスタマイズ

5重倒立 再検討
前回は5重倒立で49秒の倒立時間を達成しました。
もう少し安定できる気がしたので、詳細調査したところ下から3段目のSHISEIGYO-1 Jr. の安定性が悪いことが判明しました。
そこでSHISEIGYO-1 Jr. を除いて5重倒立させてみたところ
1分47秒もの5重倒立ができました。
これよりSHISEIGYO-1 Jr. の安定性向上が必須であるといえます。
SHISEIGYO-1 Jr. 改良
SHISEIGYO-1 Jr. の安定性改善のためにホイールのトルクを増加させました。
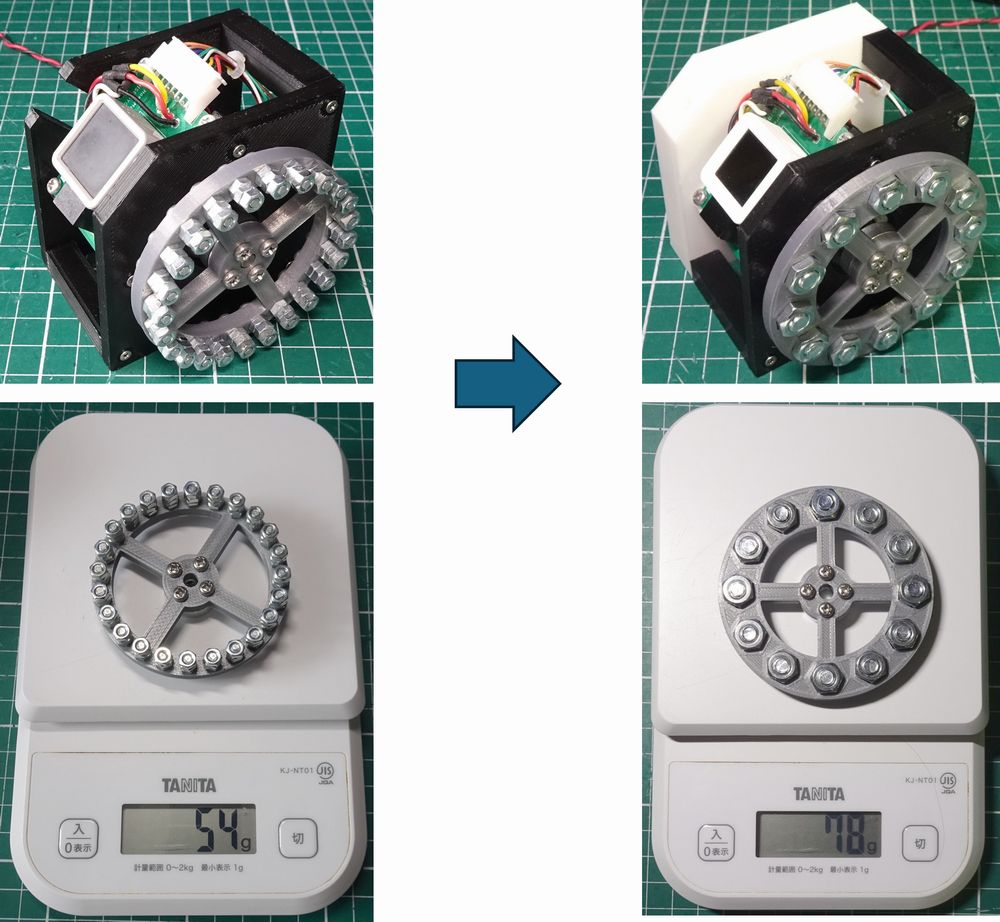
またホイールトルク増加に対して筐体やモータが軽く、倒立時にモジュールがブレてしまったため、筐体後部をゴツくして増量しました。
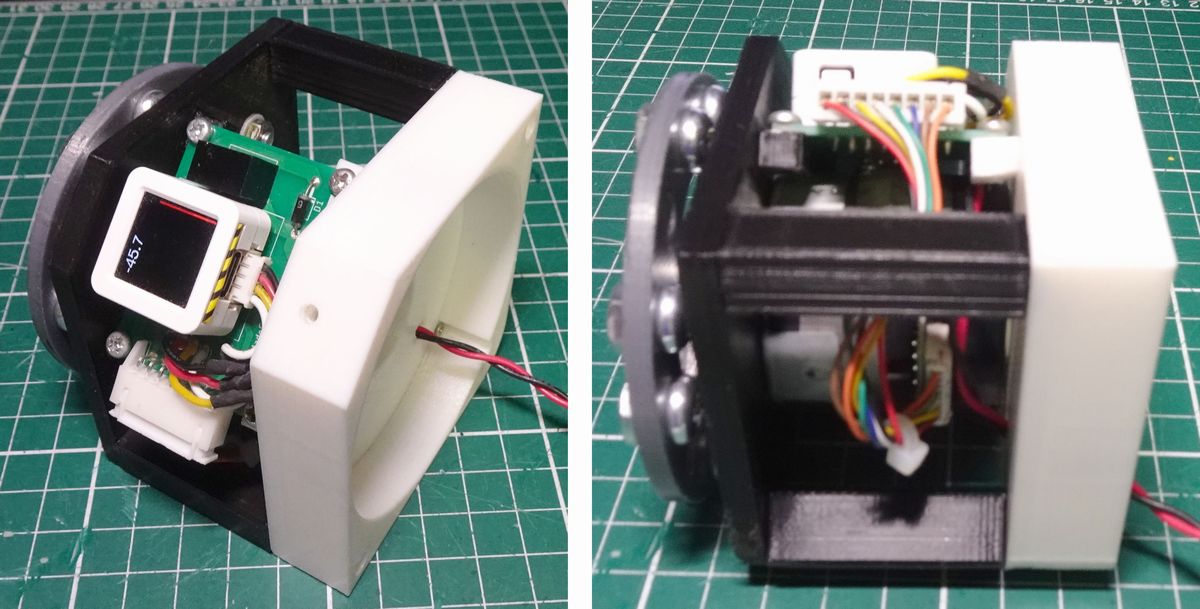
SHISEIGYO-1 DC 280RA バッテリ内蔵
さらに下から4段目となる SHISEIGYO-1 DC 280RA をバッテリ駆動にしました。
これによって長い電源コードがなくなり更なる安定化が期待できます。
SHISEIGYO-1 Jr.とSHISEIGYO-1 DC 280RA の改良後に最上段の極小モジュールSHISEIGYO-1 DC XIAO を除いた5重倒立を試したところ
正調の5重倒立がやっと安定した
さっさと6重すればよいのだが
怖いんや pic.twitter.com/d3oznpNy2v— HomeMadeGarbage (@H0meMadeGarbage) February 11, 2024
1分22秒を達成しました。
前回の49秒を大きく更新しました。
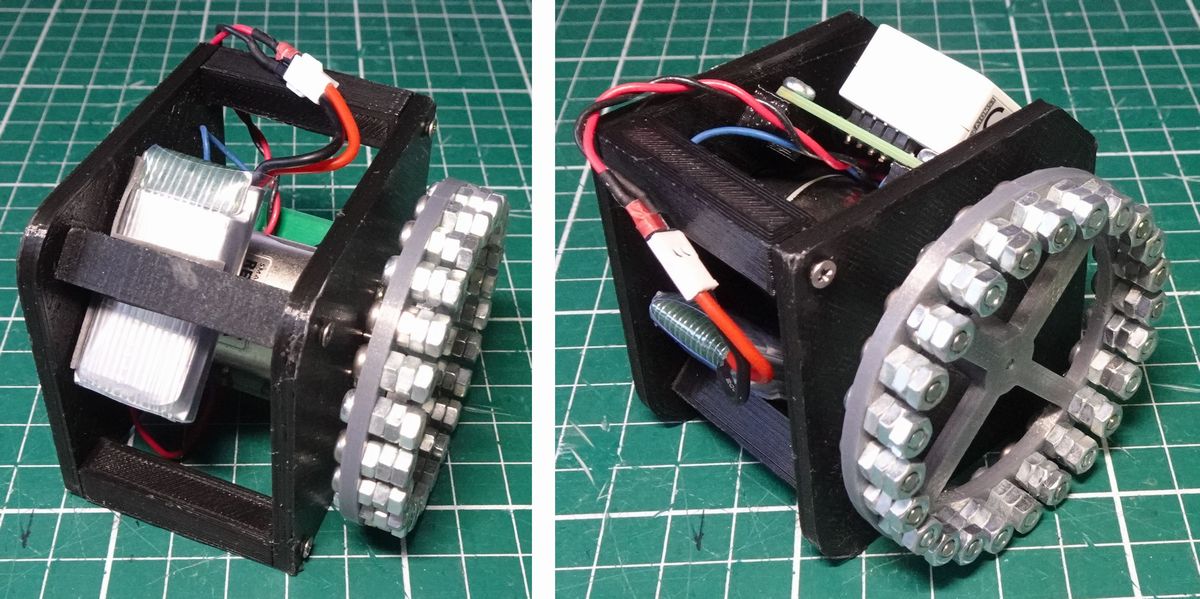
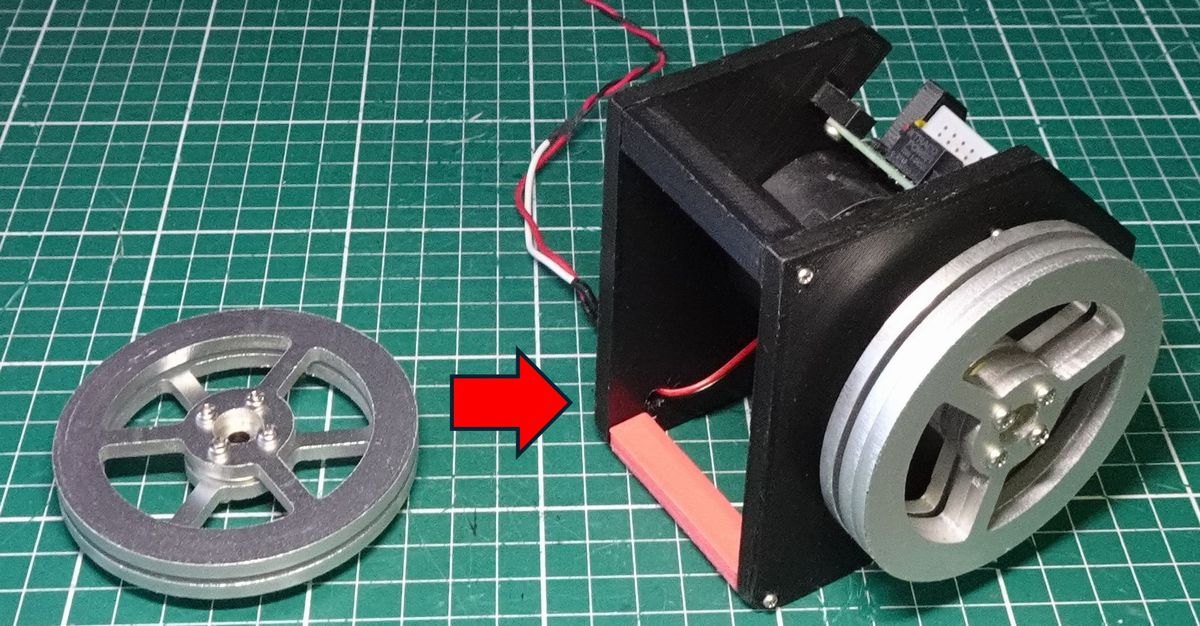
SHISEIGYO-1 ホイール増量
6重で段数が増えるので下から2段目の SHISEIGYO-1 のホイールも増量しました。
6重倒立に挑戦
ついに前人未到の6重倒立に挑戦します。
記録は6秒!
まぁ。。コレが今の私の実力ですね。
おわりに
ここでは6重倒立に挑戦しました。
時間としては6秒間と短かったですが、6重倒立の安定化は来年の7重倒立挑戦時に実施したいと思います。
今回の挑戦で何日も何日もガチャガチャとモジュールを落として、騒音で家族に迷惑をかけました。
こんなお父さんは嫌だ pic.twitter.com/CRNsybcYNi
— HomeMadeGarbage (@H0meMadeGarbage) February 12, 2024
お母ちゃんなんて防音イヤーマフを購入する始末
イヤーマフデビューした!
これ単体では思ったよりもって感じだけど(密閉型ヘッドフォンみたいな感じ?)、
耳栓➕イヤーマフなら結構大きい音も軽減される pic.twitter.com/7oQufdY7ib— hmg okaachan / bakechan (@j6XX2IChZG99891) February 7, 2024
とりあえず6重倒立の挑戦はこれにて終了!
来年の7重倒立挑戦の際にまたお会いいたしましょう。
次の記事

関連記事
 SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
 シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー