
6重倒立に向けて② ーリアクションホイールへの道65ー
本記事にはアフィリエイト広告が含まれます。
前回は6重倒立の実現に向けて本格的に始動し、4重倒立の確認を行いました。
ここでは5重倒立の検証をします。
目次
5重倒立 記録更新
まずはモチベーションの維持と向上のために5重倒立の記録更新を目指します。
これまでの5重倒立の最高倒立時間は20秒でした。
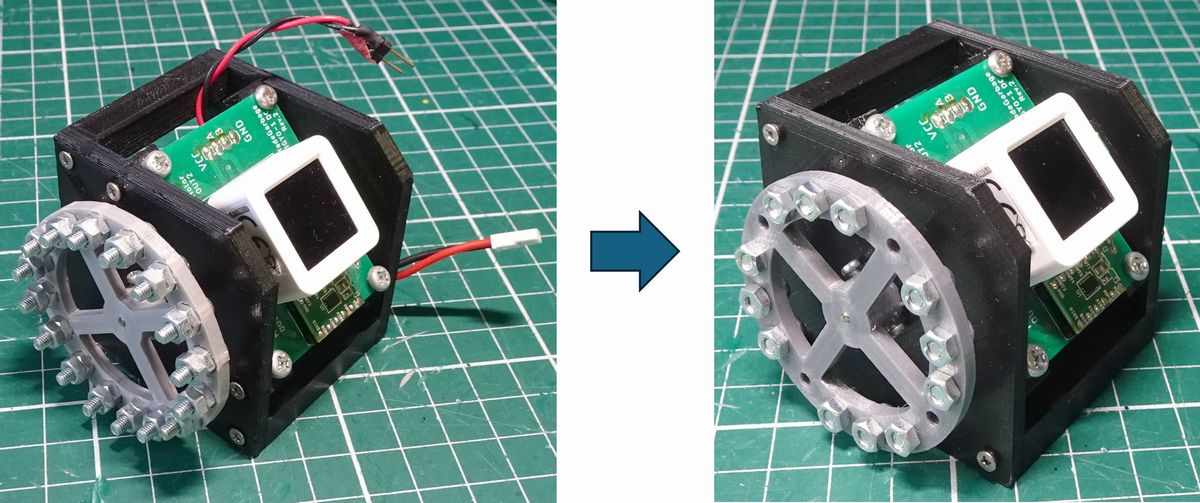
記録更新を優先させるために6段目の極小モジュールを5段目にして長時間倒立を目指します。
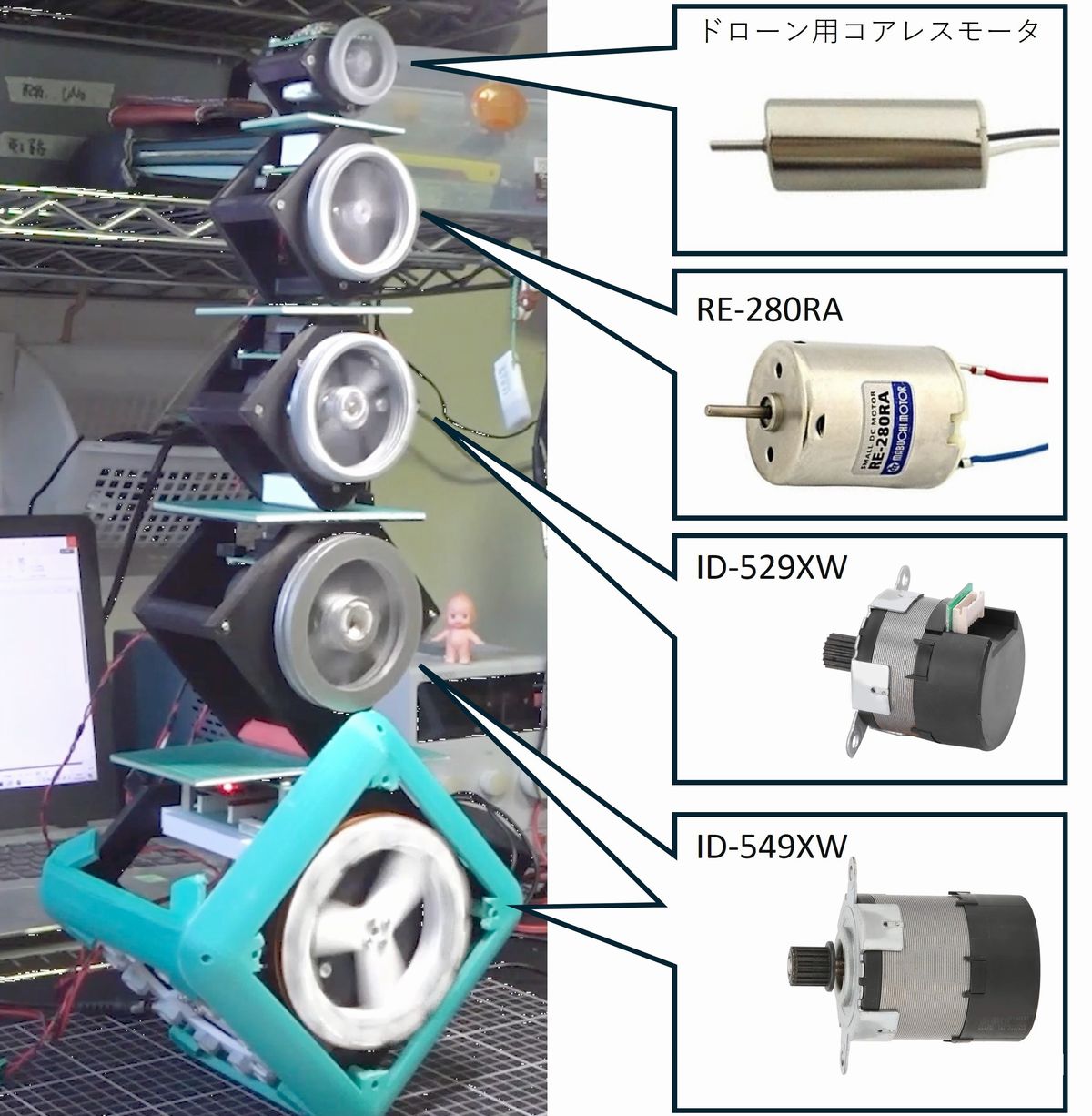
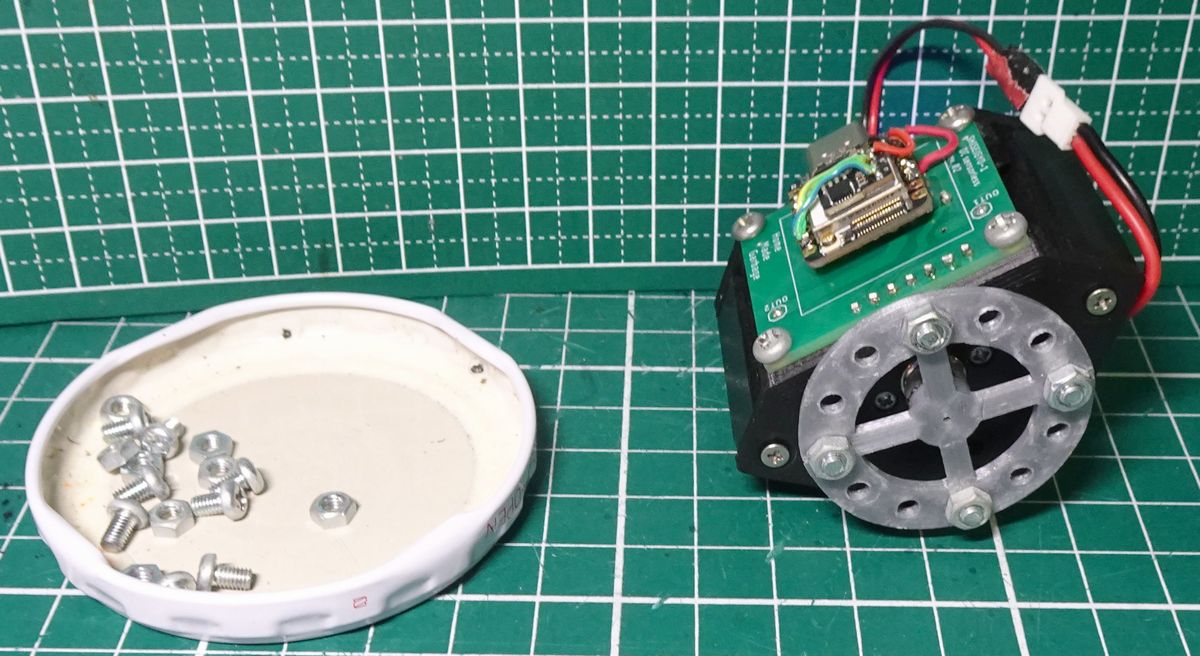
更に軽量化のため極小モジュールのホイールのネジをギリギリまで削減しました。
46秒の倒立時間を達成できました!
ひとまず やる気が湧きました!

正規の5重倒立
5重倒立の倒立時間の記録更新ができ、まずは過去の自分を超えることができたので6重倒立に向けた正規の5重倒立の検証を進めます。
かなり難しい。。ここで安定倒立できないと6重倒立は一生無理だよね。。
頭おかしなるで pic.twitter.com/GSQIVvHe9p
— HomeMadeGarbage (@H0meMadeGarbage) February 6, 2024
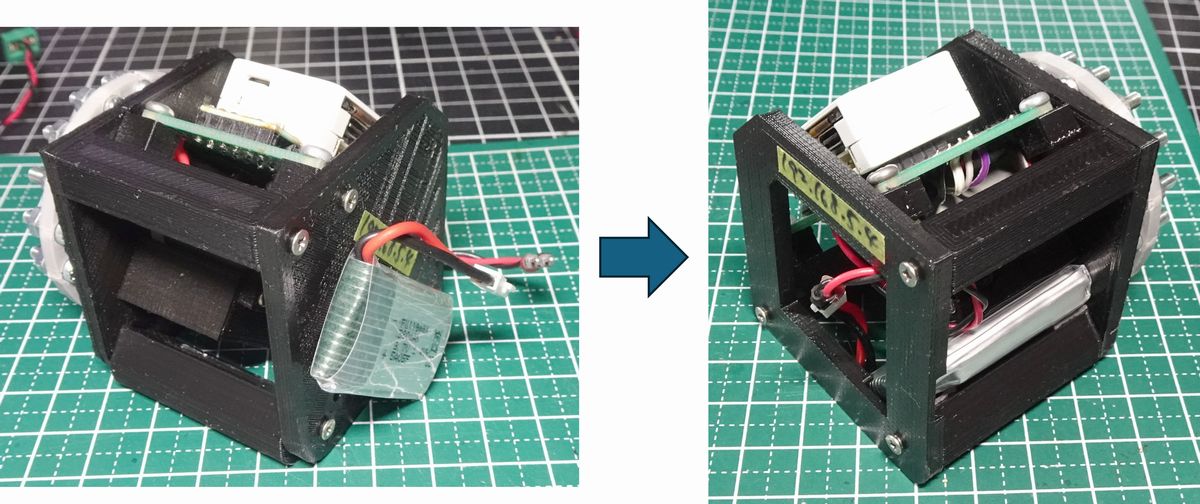
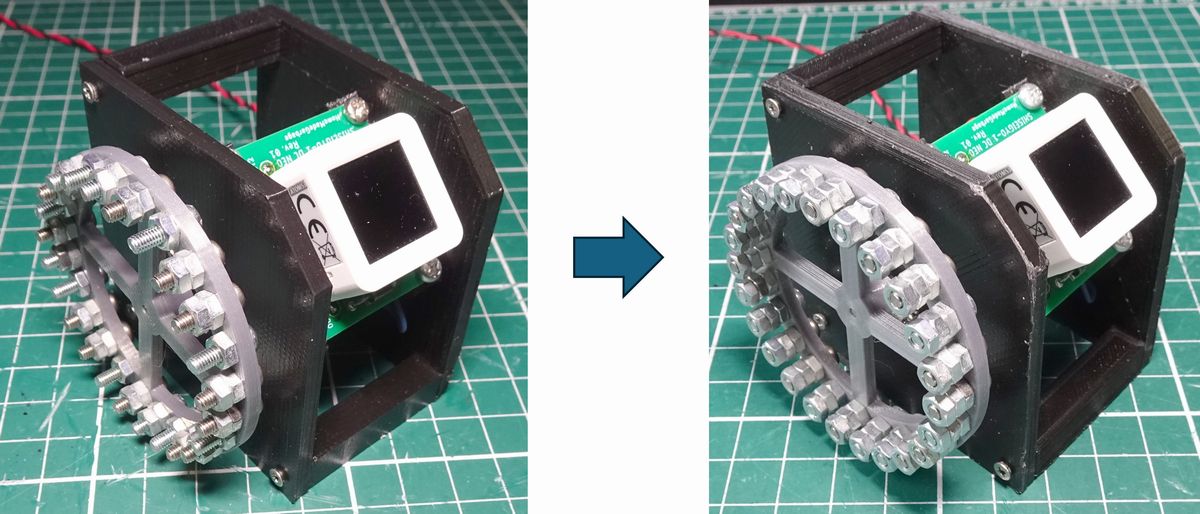
ここでの最上段 (5段目)となるSHISEIGYO-1 DCの筐体を改良しました。
雑に配置していたバッテリを支点軸上に配置できるようにしました。
更に背面版を肉抜きして軽量化しました。
上記変更に伴いホイールのネジも減らしてトルク軽減しました。
だいぶ倒立できるようになってきました。
下段3段を再調整することで10秒以上は倒立できるようになった。
常時30秒以上倒立してくれないと6重は無理 pic.twitter.com/o8hEq0kwyI— HomeMadeGarbage (@H0meMadeGarbage) February 6, 2024
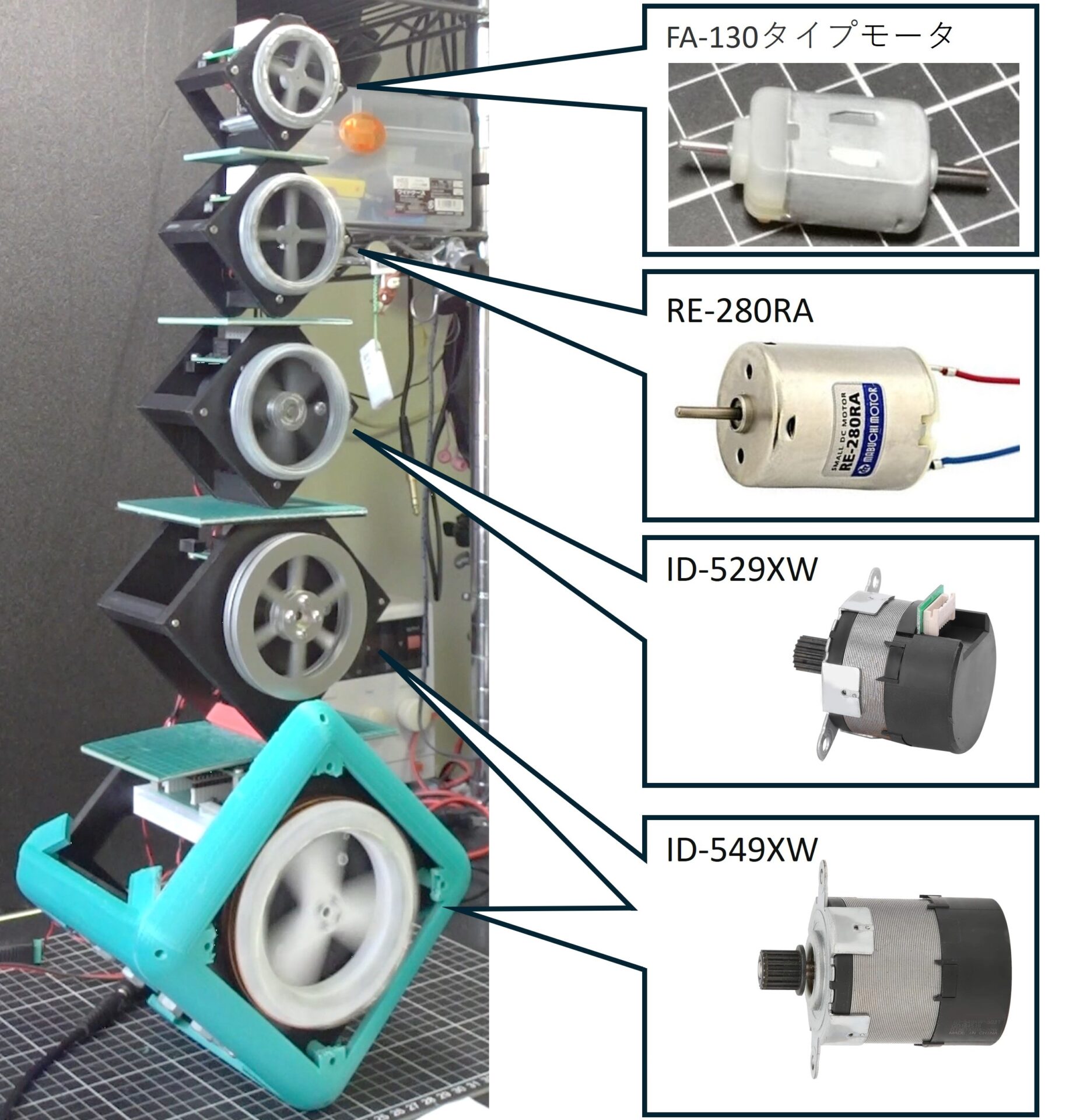
ちょっと下から4段目のモジュールのトルクが足りないようなのでホイールを増量しました。
記録更新
もろもろ再調整して5重での安定倒立ができるようになりました。
49秒!! 記録更新!!!
極小モジュールを控えに回しての記録更新はアツいです!
安定して常時 数十秒以上 5重倒立できるようになりました。
おわりに
ここでは5重倒立の検証を実施しました。
去年達成した5重倒立の記録を更新することができ、調整の結果 極小モジュールを使用せずに安定倒立ができるようになりました。
次回はいよいよ前人未到の6重倒立への挑戦となります。
ケガしないように頑張ります!
次の記事

関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
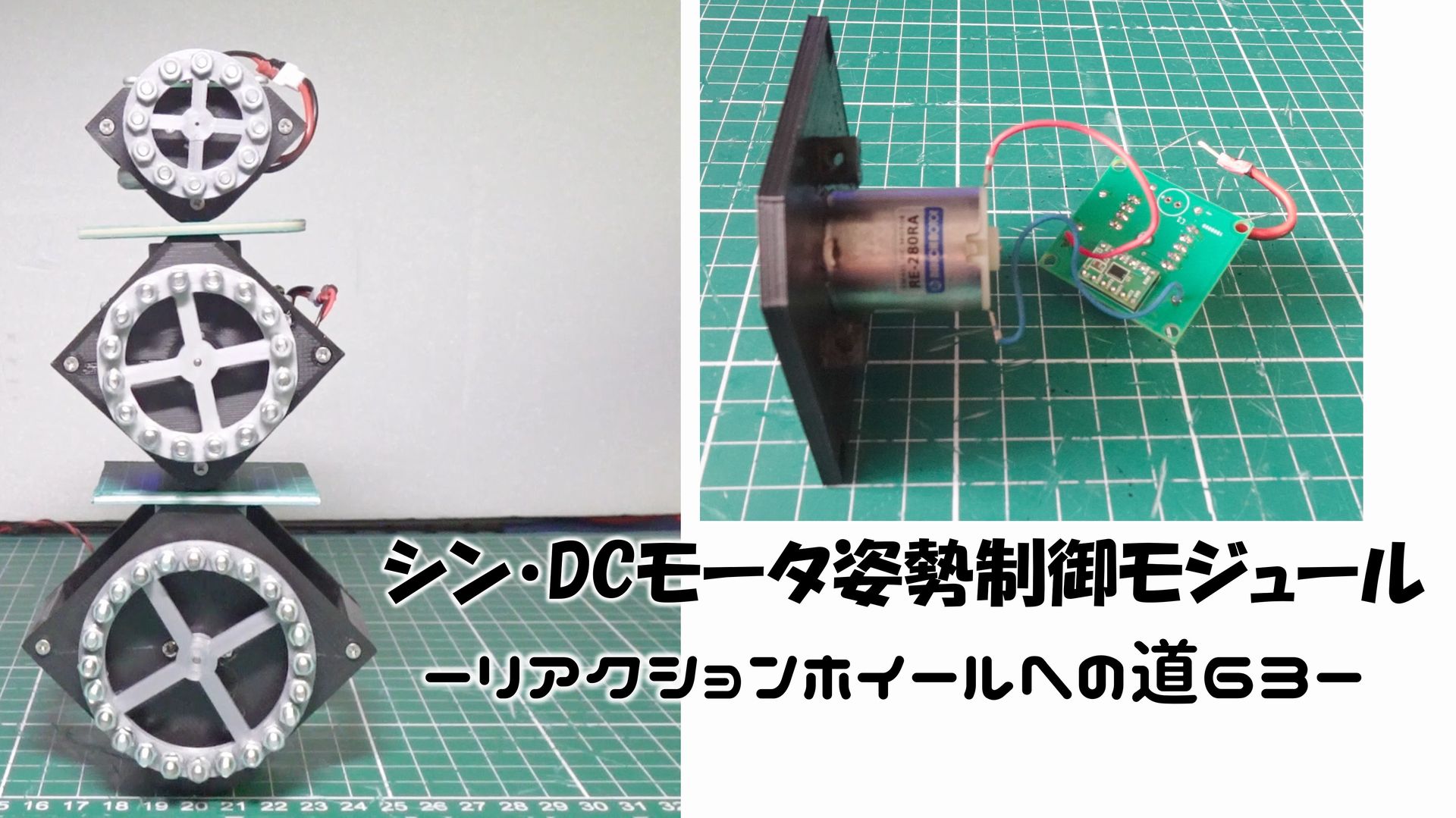 シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
 6重倒立に向けて① ーリアクションホイールへの道64ー
6重倒立に向けて① ーリアクションホイールへの道64ー