
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
本記事にはアフィリエイト広告が含まれます。
前回は極小姿勢制御モジュールを製作し報告させていただきました。
製作した極小姿勢制御モジュール “SHISEIGYO-1 DC センサレス Jr.” を頂点に多段重ねの倒立も試しました。
朝練
今朝はこんぐらいにしといたらぁ pic.twitter.com/sXX87AYWIQ— HomeMadeGarbage (@H0meMadeGarbage) February 7, 2023
前回は4段倒立がなかなかできない状況でしたが、ここではもろもろ調整して5段倒立を目指しましたので報告します。
目次
以前の状況
まずは極小姿勢制御モジュールの完成以前の多段重ね倒立の状況を記します。
記録としては4段重ねで1分15秒が最高記録でした。
【ブログ更新】
姿勢制御モジュール 4重倒立に挑戦🔽ブログリンクはコチラhttps://t.co/kwNGwagKGc#ReactionWheel #挑戦 #世界記録 pic.twitter.com/l214qTJdYG
— HomeMadeGarbage (@H0meMadeGarbage) February 4, 2022
4段の構成は下段から以下の通りです。
- SHISEIGYO-3を1軸用にカスタマイズしたSHISEIGYO-1 the END
- SHISEIGYO-1
- SHISEIGYO-1 Jr.
- SHISEIGYO-1 DC
専用基板製作
極小姿勢制御モジュール “SHISEIGYO-1 DC センサレス Jr.” 用の専用基板を製作して仕上がりをスッキリさせました。
かわいい仕上がり pic.twitter.com/yr0cUNC9mm
— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2023
3重倒立
SHISEIGYO-1 DC センサレス Jr. を専用基板で仕上げて更に制御パラメータを調整したところ、
長時間の3重倒立が実現されました。
パラメータ調整でパワーアップ https://t.co/zYxIiaQ75o pic.twitter.com/cBqlBOp3CG
— HomeMadeGarbage (@H0meMadeGarbage) March 3, 2023
一番下の SHISEIGYO-1 Jr. のフライホイールもナットを追加して重量を増しています。
4重倒立
続いて4重倒立に挑戦。
4重倒立
ムズイ pic.twitter.com/NFEORTbQ9W— HomeMadeGarbage (@H0meMadeGarbage) March 2, 2023
まだまだ安定倒立には程遠い状況です。。
モータ変更
SHISEIGYO-1 DC センサレス Jr. のトルクが足りないように感じたので、モータのサイズを大きくしてみました。

左が購入品 右が従来のモータ。
なんか太いからコイルや磁石いっぱい詰まっててトルクも大きいだろ。きっと。
[amazonjs asin=”B07CQW4HQT” locale=”JP” title=”GUOOL モーター 高速モーター ヘリ マルチコプターボディパーツ 全3選択 , モータ電圧3.7V, 8.5x20x5mm(モーターサイズ)”]
3重倒立
モータ変更後に3重倒立お試し。かなり安定度が向上しました。
4重倒立
4重倒立
難しいけど絶望感はない pic.twitter.com/ptXDAhrqgv— HomeMadeGarbage (@H0meMadeGarbage) March 16, 2023
SHISEIGYO-1 DC センサレス Jr. 自体のトルクは十分なのですが、最上部で倒立させるために電源線を引き延ばしており配線の重さが影響して長時間倒立ができない様子でした。
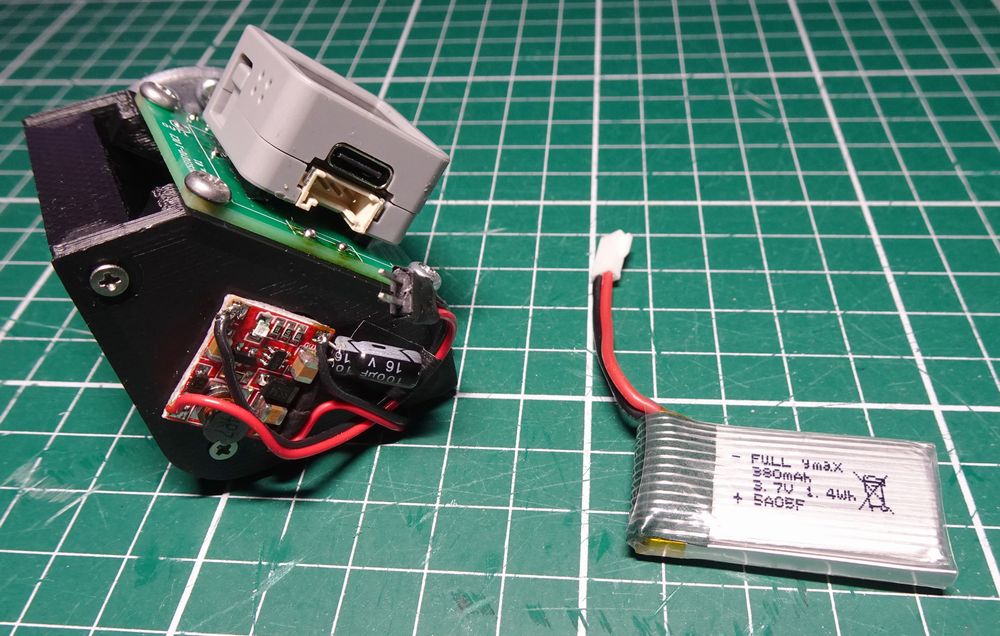
電源ワイヤレス
SHISEIGYO-1 DC センサレス Jr. 自体が小さく軽いために電源線の重さでもバランスに影響を与えるのでバッテリ内蔵化しました。
LiPoバッテリを5V DCDCで昇圧して機体に電源供給しています。
4重倒立
早速 4重倒立。一番上のSHISEIGYO-1 DC センサレス Jr. の電源ワイヤレス化によって安定性が急激に向上しました。
4重倒立で5分以上は驚くべき記録と言えます。
5重倒立に向けた準備は十分だとお考えます。
5重倒立
準備が整いましたので
いよいよ5重倒立に挑戦です。
時間は短いですが1stトライで5重倒立が達成できました!
極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. の実現と入念な準備の賜物です。
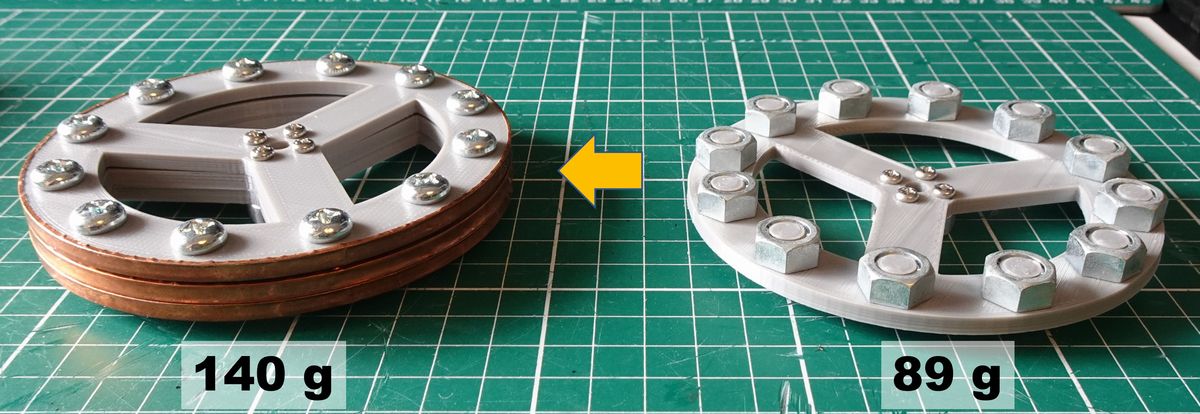
段数増加に伴いまして一番下の SHISEIGYO-1 the END のホイールの重量を増やしております。
2nd トライ!!
20秒の5重倒立に成功。
やはりかなり難しいです。。NG集もどうぞ (ポリスストーリーのエンディングテーマを心に流してみていただきたいです)。
おわりに
ここでは極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. を頂点とした5重倒立に挑戦いたしました。
SHISEIGYO-1 DC センサレス Jr. の実現までは夢にも考えなかった5重倒立の実現に大変喜んでおります。
これからも工学勉強を更に強化して様々なことに挑戦したいと思います。
次の記事

関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
 DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー
DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー