
DCモータで点倒立 SHISEIGYO-2 DC ーリアクションホイールへの道52ー
本記事にはアフィリエイト広告が含まれます。
以前、ミニ四駆のDCモータを用いて1軸の姿勢制御モジュール SHISEIGYO-1 DC を製作いたしました。
ここではミニ四駆 DCモータを用いての2軸 姿勢制御モジュールを製作し点倒立を目指しました。
目次
構成
構成は単純にSHISEIGYO-1 DC のモータ駆動部を2倍にしただけです。
ホイールが倍になり制御ピンが増えたのでコントローラにはM5Stack Core2 を採用しました。
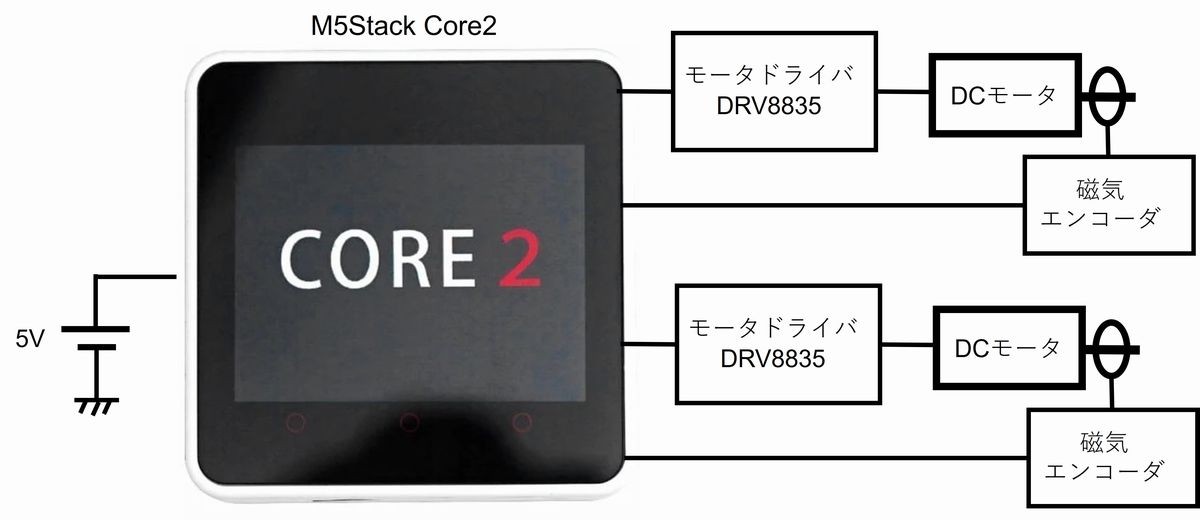
モータドライバDRV8835はモータを2個駆動できますが駆動能力向上のためにモータ1個に対してドライバ出力をパラにして使用しています。
モータの回転は磁気エンコーダで検出します。
部品
- コントローラ M5Stack core2
[amazonjs asin=”B09MT5T6XR” locale=”JP” title=”M5Stack Core2 IoT開発キット”] - モータドライバ DRV8835
- ダブルシャフトDCモータ
- 磁気エンコーダ
[bd url=”https://www.pololu.com/product/3499/resources”]


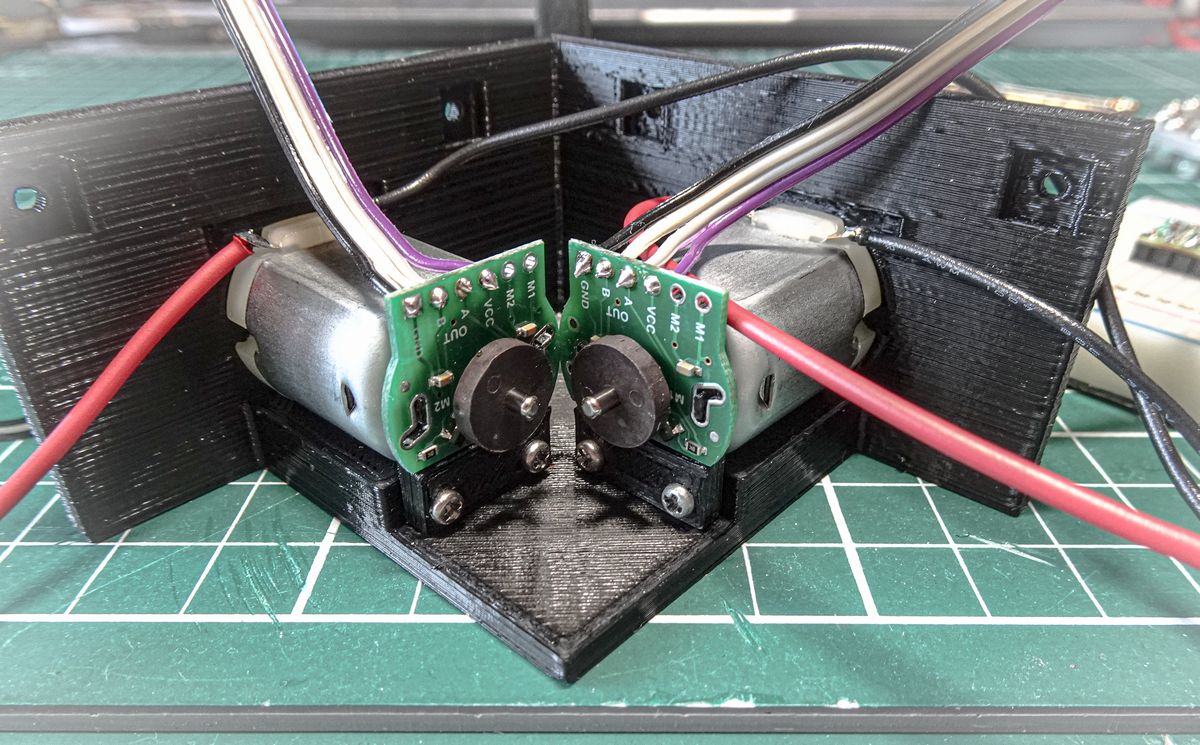
筐体ベース組立て
筐体は3Dプリンタで製作しました。

M5Stack core2 はM5Stack Japan Creativity Contest 2021 の景品の金ぴかのモノを使用します。実にゴージャスです。
— HomeMadeGarbage (@H0meMadeGarbage) September 15, 2022
制御コードは以前ブラシレスモータで製作したSHISEIGYO-2のものをベ-スにDCモータ用にカスタマイズしました。
モータとエンコーダを3Dプリントした筐体に固定
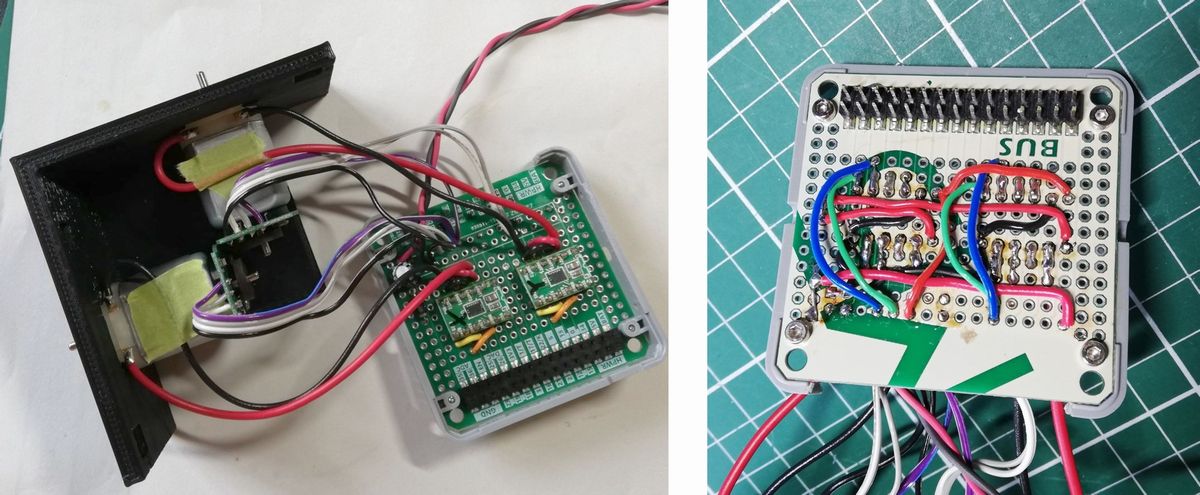
電気結線
モータドライバやエンコーダをブレッドボードを使用しつつマイコンに接続してピン配を検討します。
まわった まわった pic.twitter.com/B3RmNRKUHl
— HomeMadeGarbage (@H0meMadeGarbage) September 15, 2022
使用ピン決定後にはんだ付け。
結線にはM5Stack用BUSモジュールを用いました。
[amazonjs asin=”B084X83WXQ” locale=”JP” title=”M5Stack用BUSモジュール”]
結線バッチリ pic.twitter.com/o2Pts1rLIo
— HomeMadeGarbage (@H0meMadeGarbage) September 16, 2022
倒立動作確認
いよいよ倒立動作を目指します。
倒立時のモータの制御パラメータは以前のSHISEIGYO-2の時と同様にCore2のタッチパネルで調整します。

辺倒立
以下のような三角柱の治具を3Dプリントして、まずは辺倒立動作を確認します。

X軸 OK
1軸づつ丁寧に確認
X軸OK pic.twitter.com/V8ODQAdTu2— HomeMadeGarbage (@H0meMadeGarbage) September 16, 2022
Y軸 OK
Y軸もケーオツ pic.twitter.com/gdPmspauH0
— HomeMadeGarbage (@H0meMadeGarbage) September 16, 2022
点倒立
各軸での辺倒立が確認できましたので、三角柱を点倒立用の棒に変えて倒立動作を目指します。
俺の三連休は始まったばかりだ pic.twitter.com/Z228oICSk6
— HomeMadeGarbage (@H0meMadeGarbage) September 17, 2022
だいぶ いい感じに
勝ち確 pic.twitter.com/AqQnEJPoUe
— HomeMadeGarbage (@H0meMadeGarbage) September 17, 2022
点倒立達成!!
ありがとうございます。#M5Stack pic.twitter.com/7ZaP0GumMV
— HomeMadeGarbage (@H0meMadeGarbage) September 18, 2022
比較的大きなCore2を載せてDCモータで2軸での点倒立の実現には若干の不安がありましたが無地に達成することができました。
Robotics pic.twitter.com/ps0QsEIUBp
— HomeMadeGarbage (@H0meMadeGarbage) September 19, 2022
次の記事

関連記事
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
SHISEIGYO-1 DC の現状と今後 ーリアクションホイールへの道46ー
 SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
SHISEIGYO-1 DC 完成! ーリアクションホイールへの道47ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー
姿勢制御装置とバーサライタの融合2 ーリアクションホイールへの道51ー