3軸姿勢制御モジュールの再検討 ーリアクションホイールへの道58ー
本記事にはアフィリエイト広告が含まれます。
久しぶりに3軸姿勢制御モジュール (SHISEIGYO-3) の検討を実施しましたので報告いたします。
目次
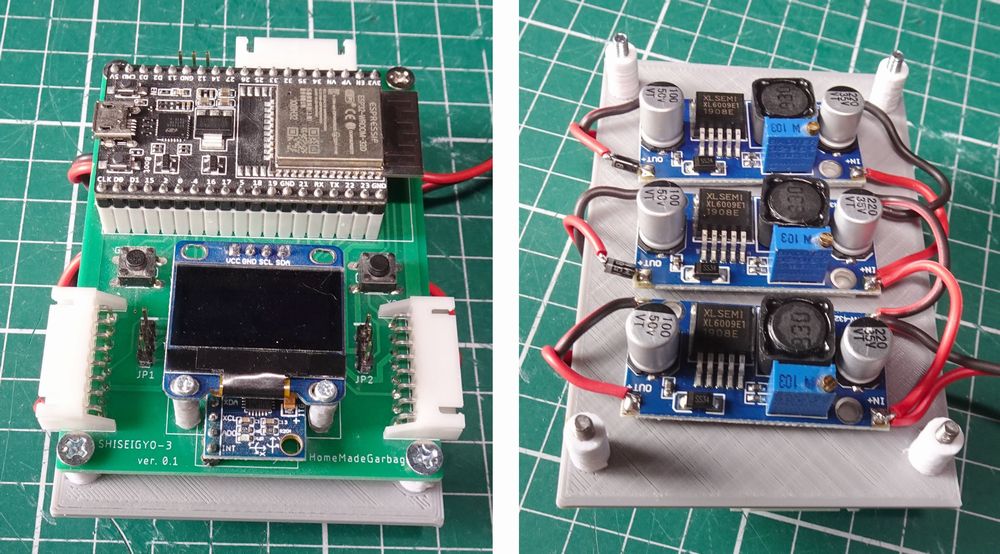
IMUセンサ位置変更
これまでのSHISEIGYO-3では辺倒立時にIMUセンサMPU6050が載った基板が水平となりました。
電子工作初心者 お母ちゃんの 3軸姿勢制御モジュール SHISEIGYO-3 への道⑩
起き上がり動作確認・・完成!☟詳細はコチラhttps://t.co/Z53P0ere0Q#ブログ #家族 #3Dプリンタ #電子工作 pic.twitter.com/1FuCpdqHic
— HomeMadeGarbage (@H0meMadeGarbage) May 17, 2023
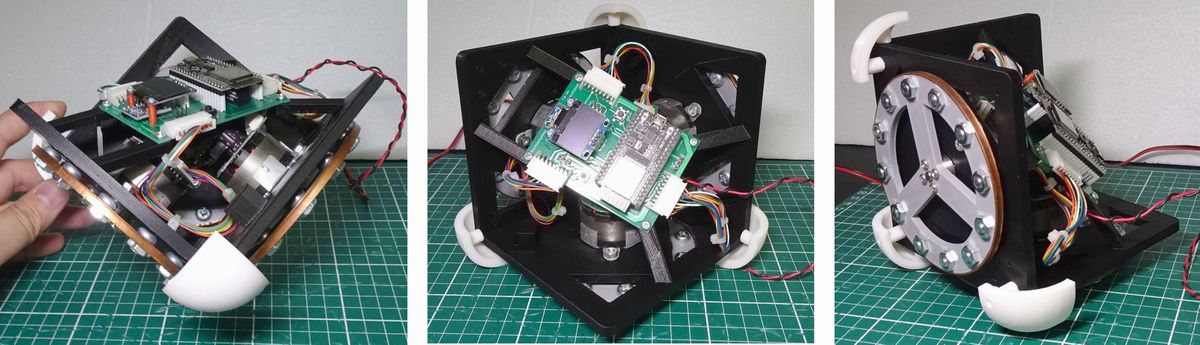
ここでは点倒立時にIMUセンサが水平になるように筐体を製作してみました。
辺倒立
各ホイールの回転軸に対して基板が傾いているので、各辺での倒立制御時にはセンサによる傾きや角速度を軸変換して倒立制御するようにしてみました。
真中のホイールによる辺倒立時は以下のように傾き、角速度を変換してフィードバック制御した。
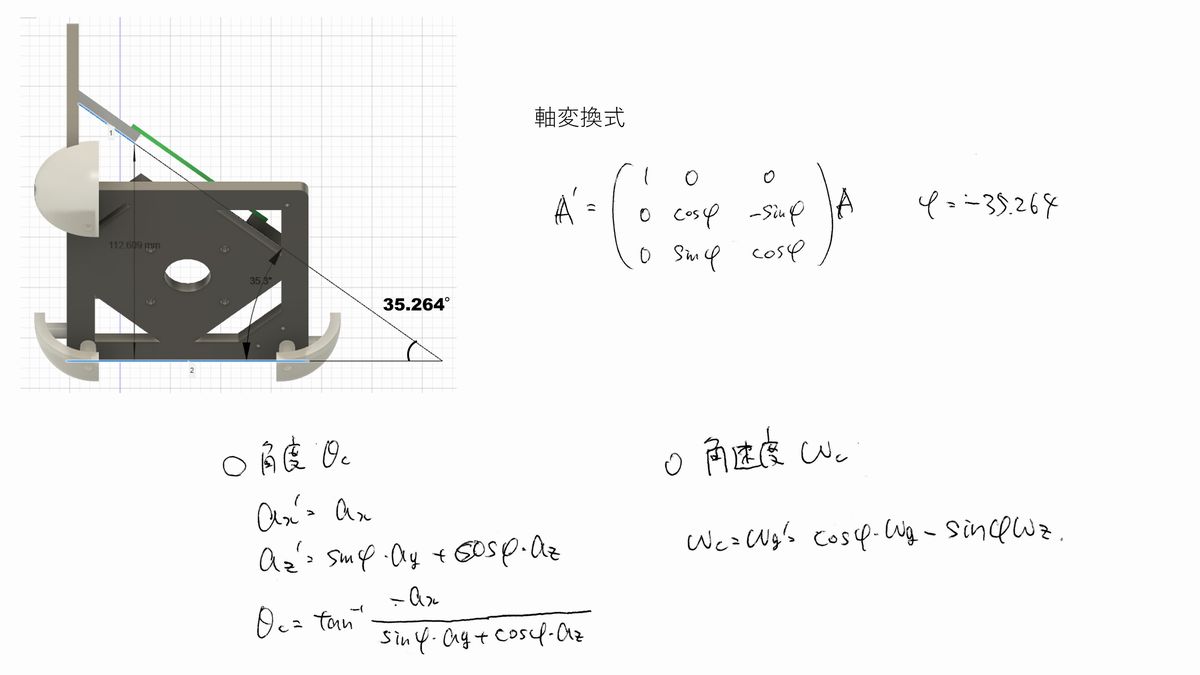
角度と角速度をホイール回転軸に変換して倒立フィードバック動作
大きな動作変化はないが、機体を倒した際に±45°付近の傾き値を得られており 正しい処置をして動作させているのだという誇らしさがある pic.twitter.com/OzAKxmPdTD
— HomeMadeGarbage (@H0meMadeGarbage) June 6, 2023
左右のホイールでの辺倒立時は以下のように変換
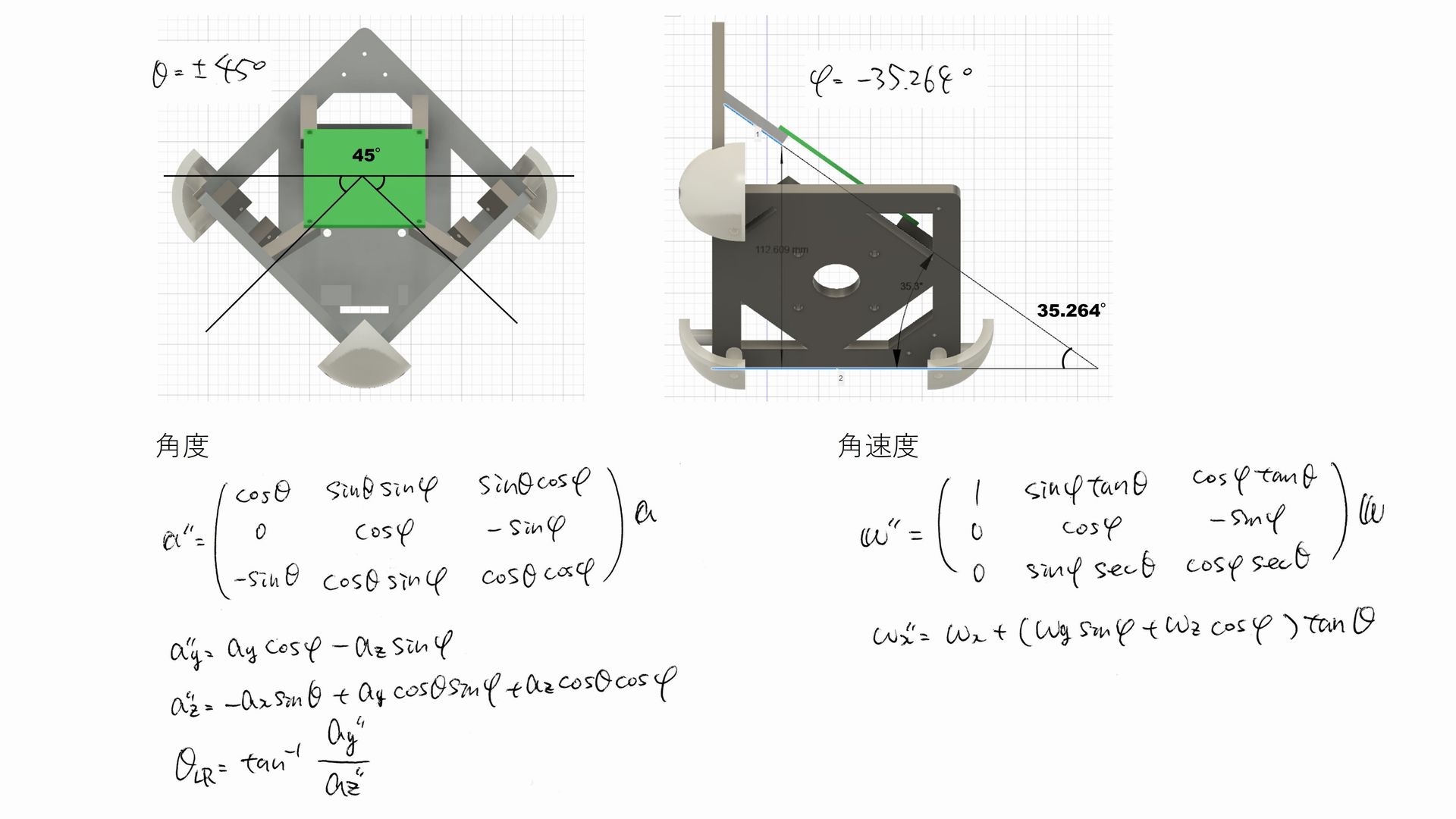
両サイドのホイール軸に対しても変換してそれぞれ機体の角度、角速度を算出して倒立動作確認
サイド軸に対して基板上のIMUは2軸回転必要なので誉れが高い pic.twitter.com/EsXaGBlIWg
— HomeMadeGarbage (@H0meMadeGarbage) June 7, 2023
参考
点倒立
点倒立時はIMUセンサが水平になりますので、軸変換はせずにX軸、Y軸の2軸の傾きと角速度に応じて各ホイールを回すようにしました。
でけた
まるで花のよう pic.twitter.com/iCJHd7gdOy— HomeMadeGarbage (@H0meMadeGarbage) June 14, 2023
非常に安定しています。
起上り動作
SHISEIGYO-3 と同様に各ホイールにバンドブレーキを装着して起上り動作を確認しました。
点倒立時に水平となるIMUセンサのX軸, Y軸のみをフィードバックしているので逆に回転動作させるのが難しい。。。要検討です。
下から撮影して各ホイールの動作を堪能
下から見てみたかった pic.twitter.com/Fx85NU6Hpg
— HomeMadeGarbage (@H0meMadeGarbage) June 15, 2023
筐体デザイン
筐体のデザインを楽しみました。
デザイン pic.twitter.com/xsZIfXmgX3
— HomeMadeGarbage (@H0meMadeGarbage) June 16, 2023
BANDAI SPIRITS(バンダイ スピリッツ) フィギュアライズスタンダード 仮面ライダーBLACK 色分け済みプラモデルhttps://t.co/i8mGhP5cn5 pic.twitter.com/TEf70S28lg
— HomeMadeGarbage (@H0meMadeGarbage) June 16, 2023
バッテリ内蔵
バッテリを内蔵してコードレス化します。

筐体をキューブにしてみた。
豆腐のカドで立った pic.twitter.com/A63qkK4VDr
— HomeMadeGarbage (@H0meMadeGarbage) June 17, 2023
またまた筐体を変えて机にしてみた。更にお得意の3重倒立
3重倒立 pic.twitter.com/YTBE36ubvq
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2023
おわりに
ここでは3軸姿勢制御モジュールのセンサ位置を変更して倒立動作の再検討を実施しました。
かなり勉強になったので、近いうちに現行のSHISEIGYO-3のレシピやファームの更新も検討したいと思います。
次の記事

関連記事
 SHISEIGYO-1 のエントリーモデルを検討 ーリアクションホイールへの道59ー
SHISEIGYO-1 のエントリーモデルを検討 ーリアクションホイールへの道59ー
 SHISEIGYO-1 DC Plus レシピ配布開始 ーリアクションホイールへの道60ー
SHISEIGYO-1 DC Plus レシピ配布開始 ーリアクションホイールへの道60ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
 Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
 シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
これめっちゃ作りたいです。
ご指導いただいけないでしょうか?
講義代も支払いたいです。
素人ですが、よろしくお願いいたします。
申し訳ございません。現在使用しているモータが入手できない状況となっておりレシピの販売も停止しているところです。
ともないまして個別の指導なども難しい状況です。