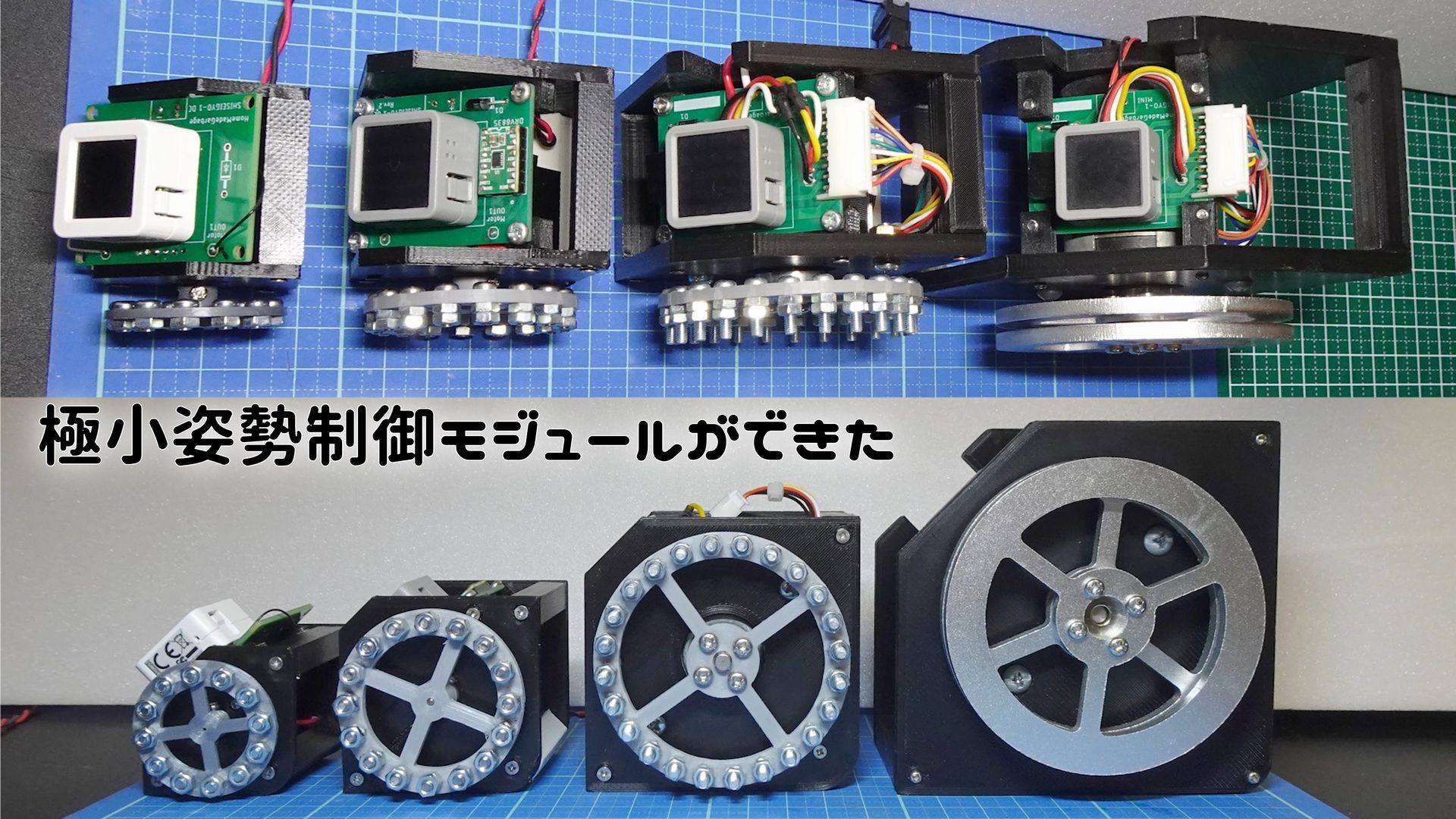
極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. ーリアクションホイールへの道56ー
本記事にはアフィリエイト広告が含まれます。
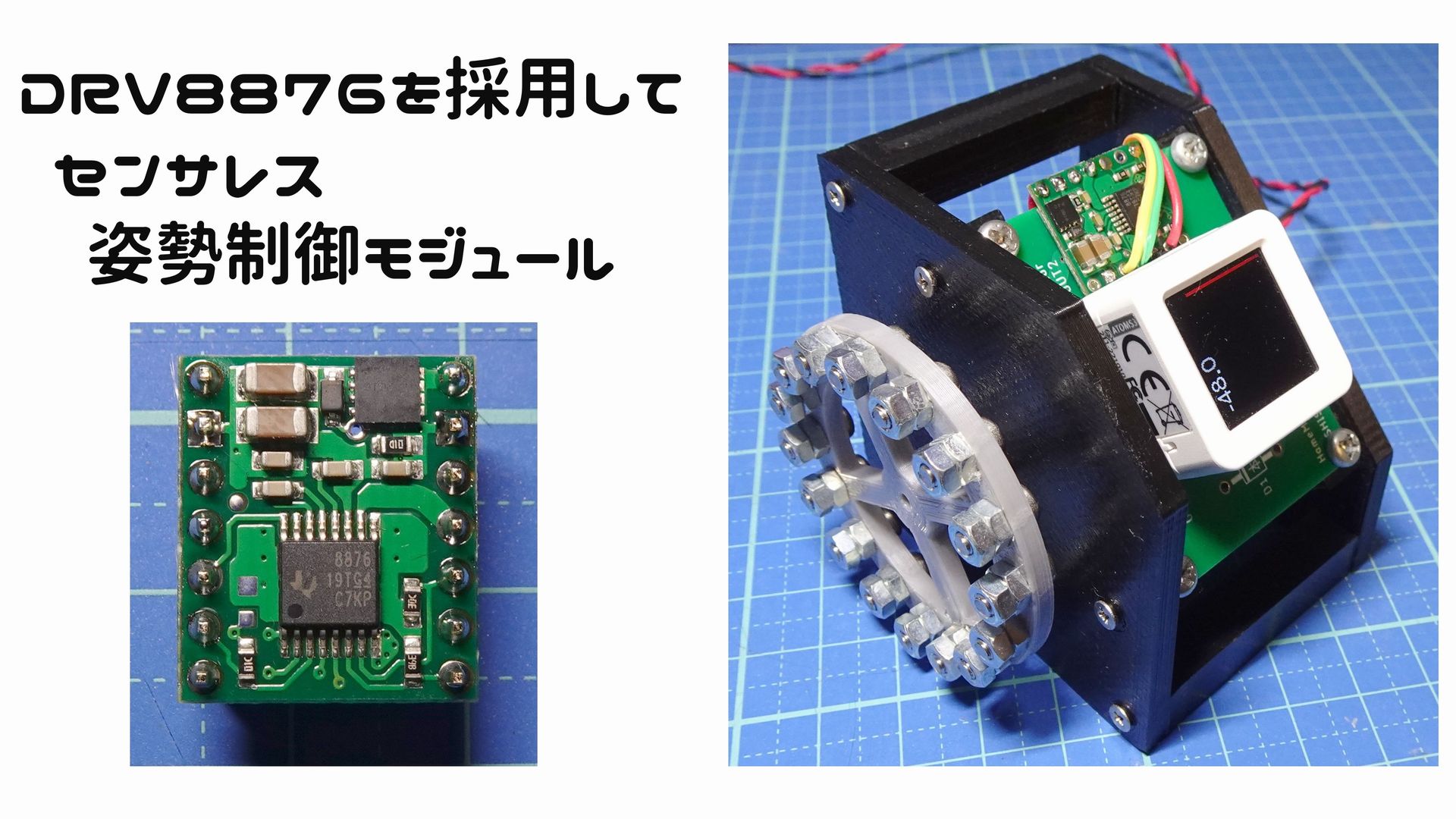
前回は電流センシング機能付きのモータドライバDRV8876を使用してエンコーダなしのセンサレス姿勢制御モジュールを製作しました。
ここではミニ四駆用のモータより更に小さいモータを使用して、モジュールの小型化を目指します。
目次
コアレスモータ
モータ電流からモータ回転速度を推定できるようになったことで、回転検知エンコーダが必要なくなりました。
それに伴ってモータ選定の幅が大きく広がりました。
ここでは姿勢制御モジュールの小型化を目指して、小型ドローンで使用されるコアレスモータの使用を検討します。
単純にミニ四駆モータからコアレスモータに変えただけですが、回転制御は問題なくできそうです。
まだ夢みれそう pic.twitter.com/oXUv39npcH
— HomeMadeGarbage (@H0meMadeGarbage) February 5, 2023
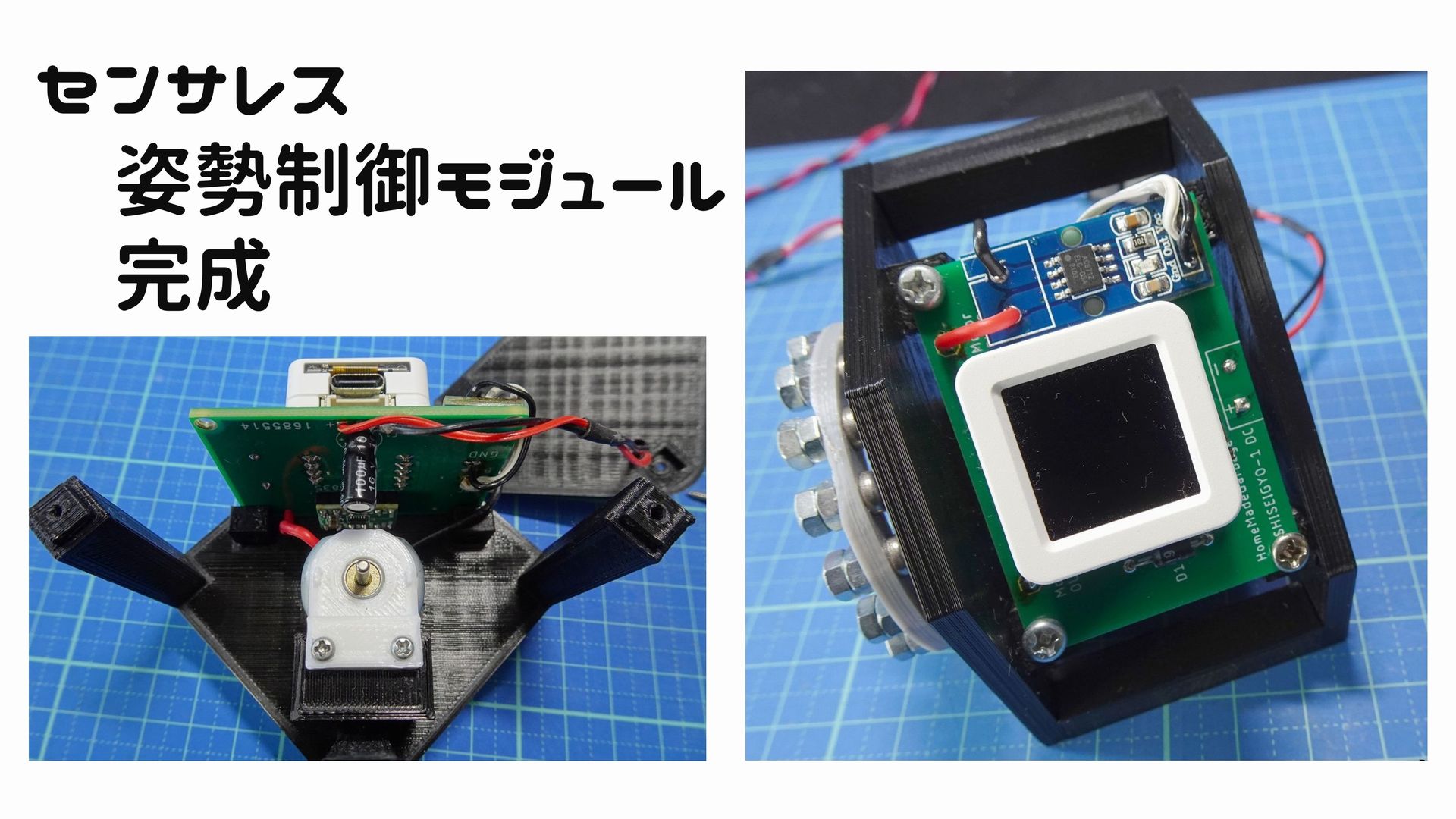
極小姿勢制御モジュール完成
コアレスモータ専用の筐体を製作しました。

専用のホイールも製作して、極小姿勢制御モジュール “SHISEIGYO-1 DC センサレス Jr.”の完成です。
制御の構成は前回と全く同様で、ATOMS3でモータドライバDRV8876を介してモータを制御しています。
5重倒立を目指して
今回作成したSHISEIGYO-1 DC センサレス Jr. をこれまで最小であったSHISEIGYO-1 DC に載せてみました。
極小姿勢制御モジュール on SHISEIGYO-1 DC
ここからは載せテクの向上とパラメータ調整
学問から解き放たれスキルとトライ&エラーの世界へ#工学道 #リアクションホイールへの道 pic.twitter.com/gxJ2tZXN9v— HomeMadeGarbage (@H0meMadeGarbage) February 6, 2023
なんと問題なく載せることができ、11分以上倒立しました。
ノーカット版は以下
こうなると以前挑戦した4重倒立のその上を目指したくなるのがチャレンジャーの性というもの。
【ブログ更新】
姿勢制御モジュール 4重倒立に挑戦🔽ブログリンクはコチラhttps://t.co/kwNGwagKGc#ReactionWheel #挑戦 #世界記録 pic.twitter.com/l214qTJdYG
— HomeMadeGarbage (@H0meMadeGarbage) February 4, 2022
3重倒立
SHISEIGYO-1 DC センサレス Jr.、SHISEIGYO-1 DC、SHISEIGYO-1 Jr. の3重に挑戦
夜練習終了
5重に向けての可能性は感じれるようになった。 pic.twitter.com/wKUztTxW6Y— HomeMadeGarbage (@H0meMadeGarbage) February 7, 2023
まぁまぁイケてる。
4重倒立
さらに下にSHISEIGYO-1を置いて4重に挑戦。
朝練
今朝はこんぐらいにしといたらぁ pic.twitter.com/sXX87AYWIQ— HomeMadeGarbage (@H0meMadeGarbage) February 7, 2023
ちょっと厳しい。。。
調整と練習が必要ですね。
5重倒立実現にむけて努力します!
専用基板作製
DRV8876専用の基板も作製しました。
かわいい仕上がり pic.twitter.com/yr0cUNC9mm
— HomeMadeGarbage (@H0meMadeGarbage) February 15, 2023
専用基板によって更に小型化できましたので、5重倒立に向けて検討進めたいと思います!
次の記事

関連記事
 センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
 DRV8876を採用してセンサレス姿勢制御モジュール ーリアクションホイールへの道55ー
DRV8876を採用してセンサレス姿勢制御モジュール ーリアクションホイールへの道55ー
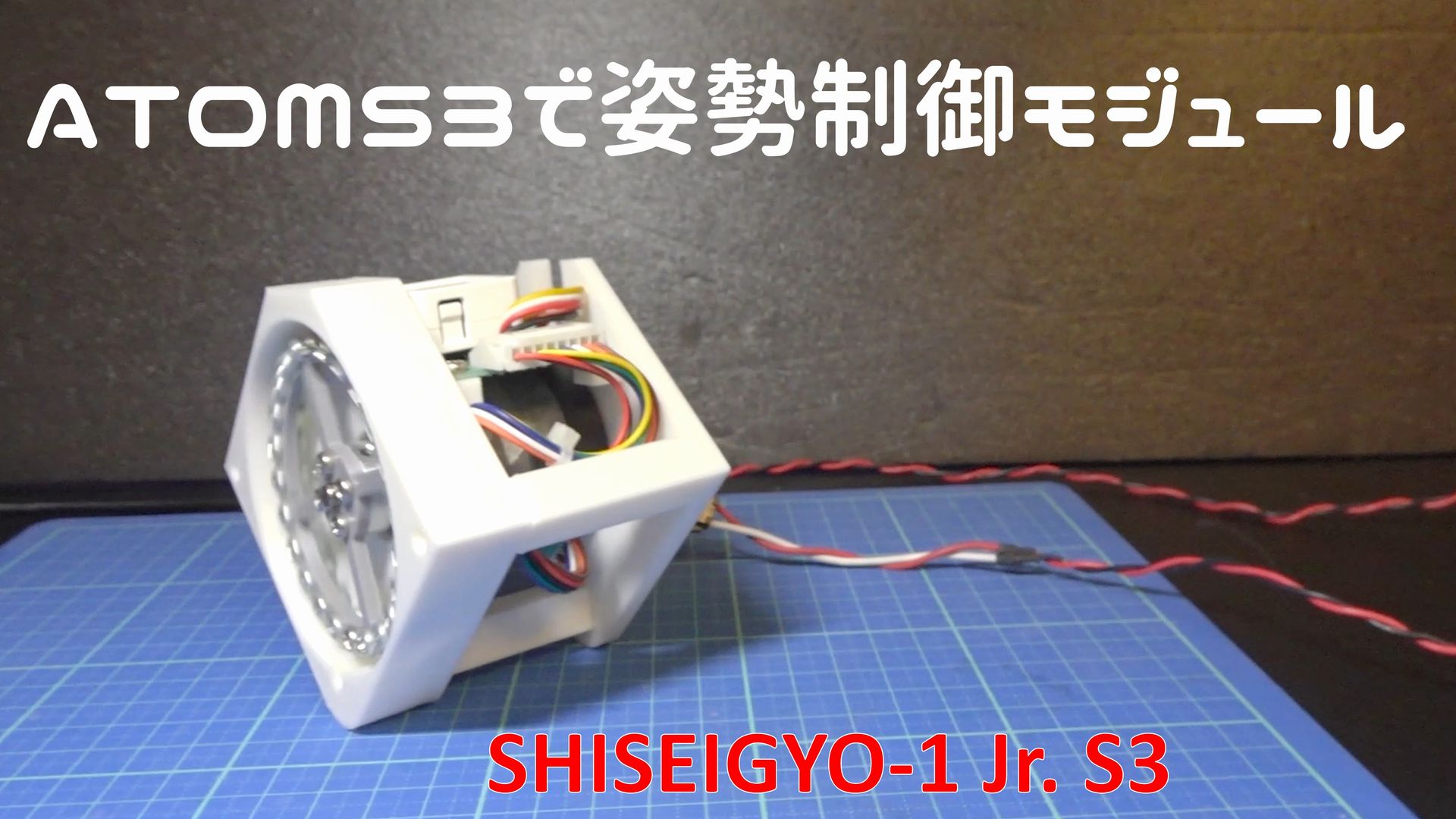 ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
 姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー
姿勢制御モジュール 5重倒立挑戦 ーリアクションホイールへの道57ー