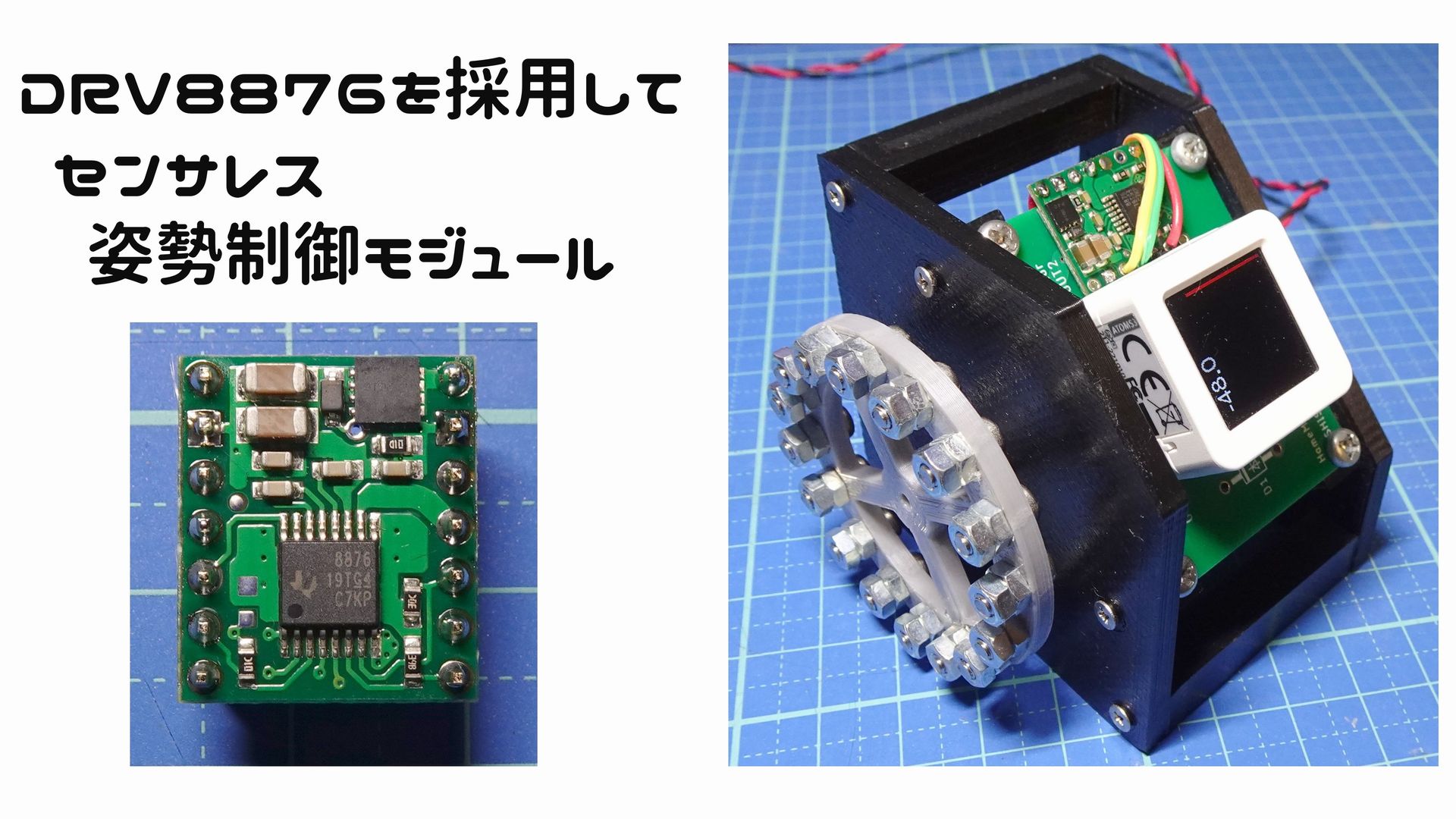
DRV8876を採用してセンサレス姿勢制御モジュール ーリアクションホイールへの道55ー
本記事にはアフィリエイト広告が含まれます。
前回は電流センサでモータ電流を検知して回転速度を推定し、磁気エンコーダなしでのセンサレス姿勢制御モジュールの倒立動作を実現しました。
ここでは電流センシング機能付きモータドライバを採用して更に部品点数の削減を試みました。
目次
モータドライバ DRV8876
DRV8876は電流センシング機能付きのモータドライバです。
電流は以下のデータシートの図の通りドライバ下部のシャント抵抗で検知します。
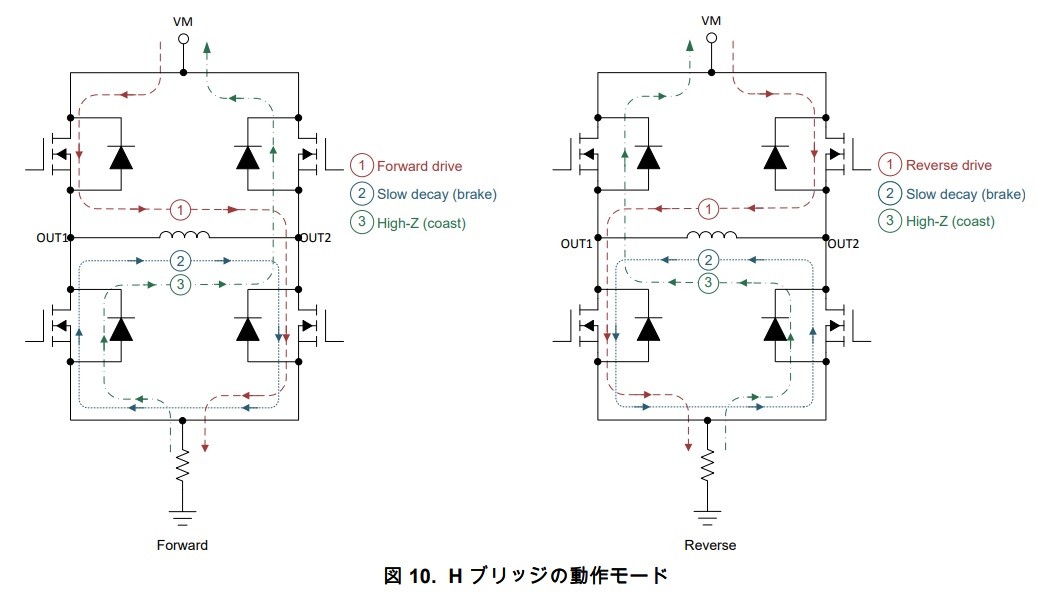
検知した電流をミラーしてIPROPIに流して外付け抵抗で電圧として測定できます。
ここではPololuのモジュールを購入しました。
良さそうな おかずを入手 pic.twitter.com/I6lUGlqEnx
— HomeMadeGarbage (@H0meMadeGarbage) February 1, 2023
Pololuのモジュールは電流センス用の抵抗やは逆起電力対策回路も内蔵で非常に使いやすかったです。
DRV8876による回転と電流検知
PololuのDRV8876モジュールで回転と電流検知を確認して観ます。
回転は以下のようにPhase / Enableモードで制御しました。
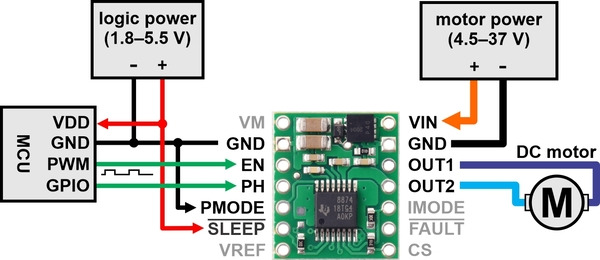
CSピンの電圧で電流が検知できます。
電流センシング機能付きモータドライバ DRV8876で回転味見
電流観れてうれしい
シャント方式なので電流方向は分からないのだけど回転方向で符号反転させてる pic.twitter.com/x1I1QnIpbk— HomeMadeGarbage (@H0meMadeGarbage) February 2, 2023
ATOMS3をコントローラとして回転させました。
可変抵抗でENピンへのPWM信号のデューティ比を指定しています。
ボタンで正転/反転。
電流値も観測できました!
モータ電流の方向までは検知できないため、正転/反転信号で符号反転しました。
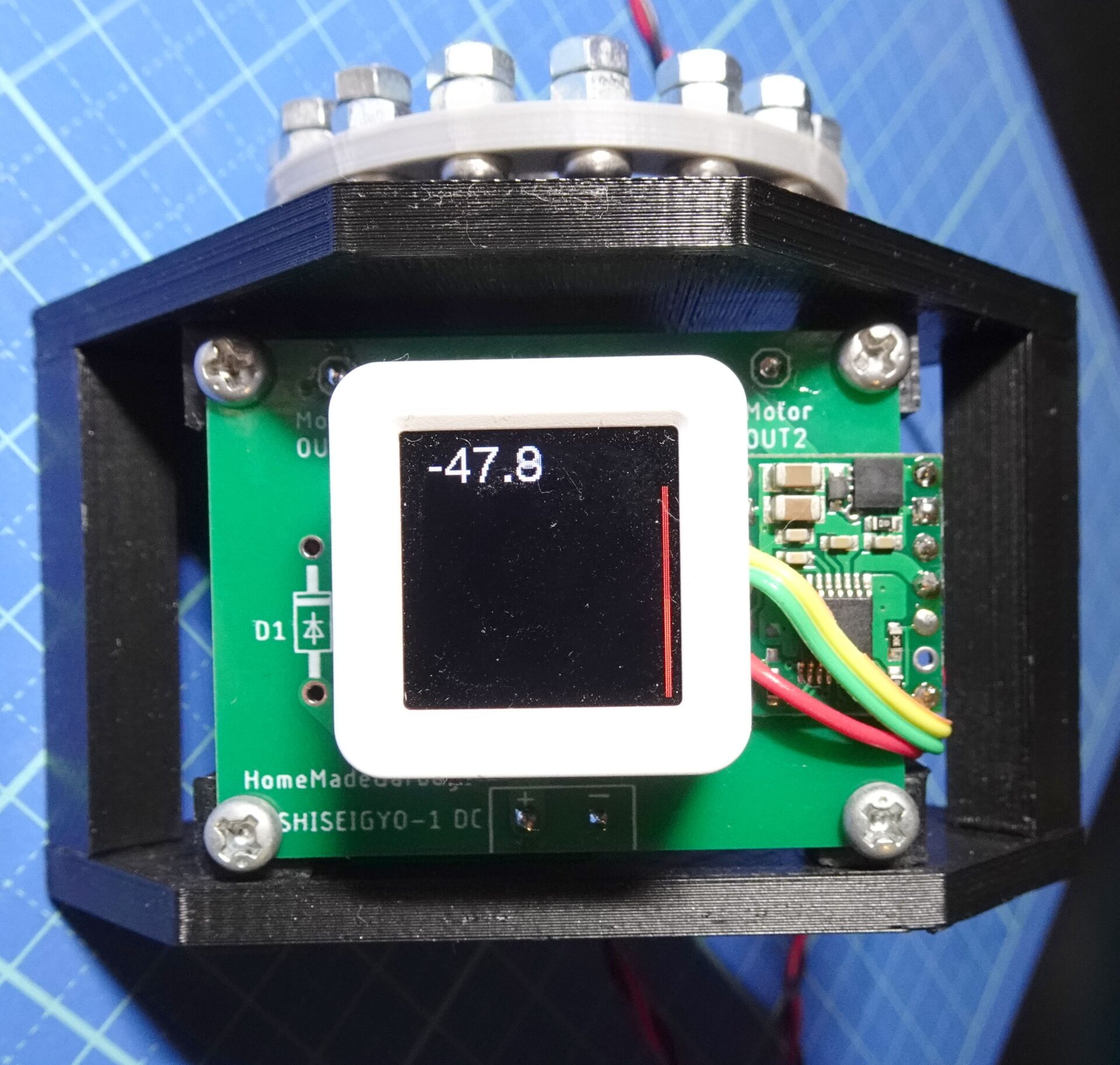
姿勢制御モジュール作製
DRV8876モジュールによる回転動作と電流センシングが確認できましたので、前回と同様にモータ電流を検知して回転速度を推定し、姿勢制御モジュールの倒立動作を目指します。
モータは普通のミニ四駆モータを使用します。
固定具を3Dプリントしました。
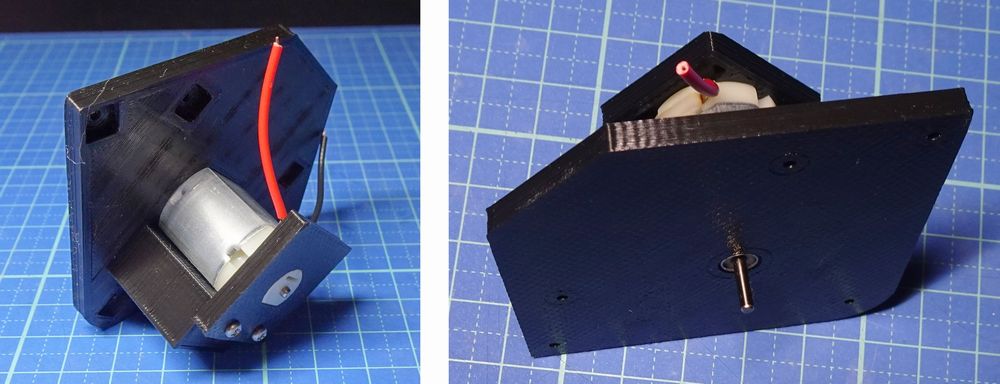
ATOMS3とDRV8876モジュールも配線。
モジュールに逆起電力対策回路や電源コンデンサもしっかり載ってるので非常に簡単に制御基板ができました。
動作
DRV8876によるセンサレス姿勢制御モジュールが完成しました!!
電流による推定回転速度でも力強い倒立が実現できております。
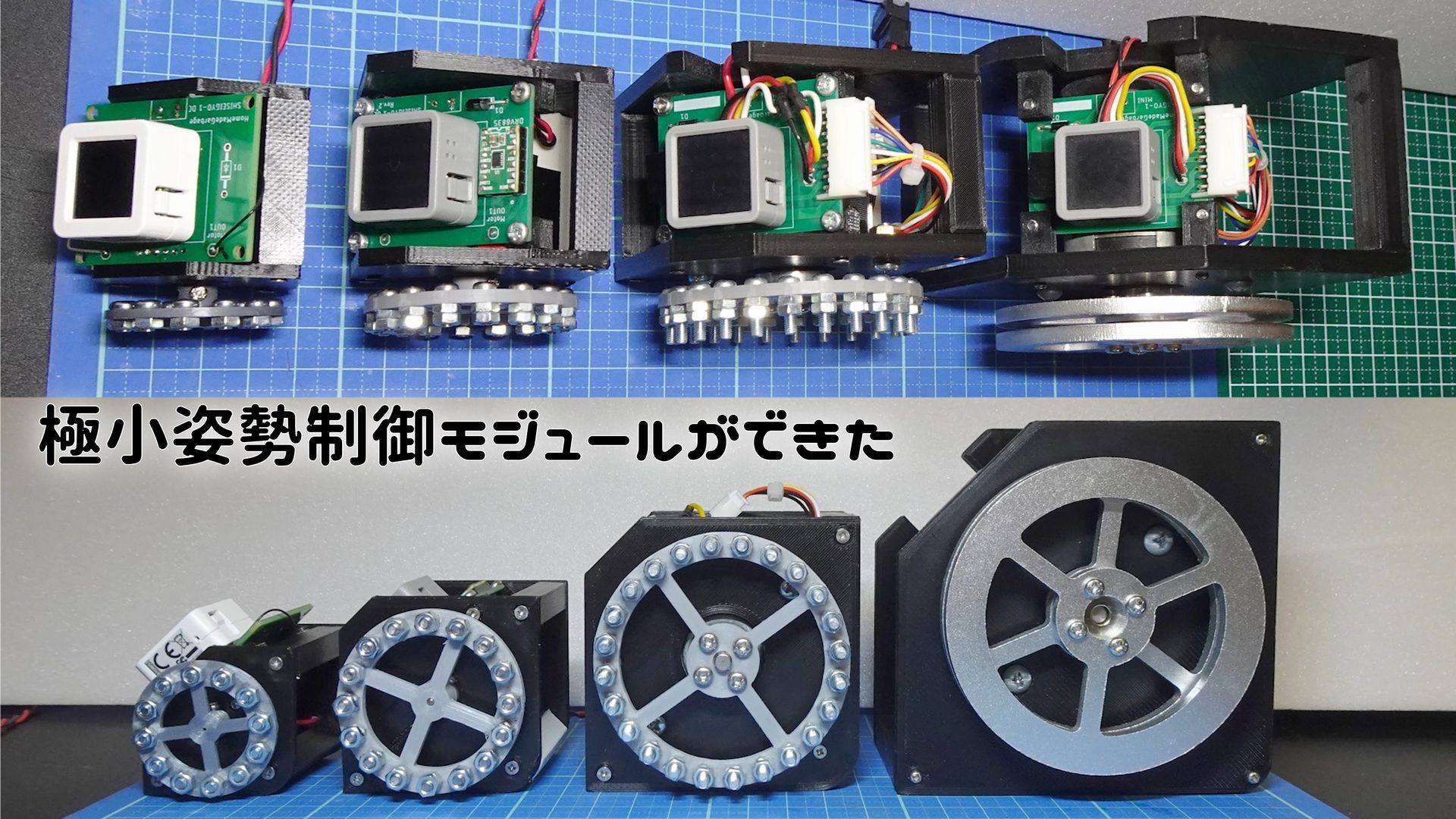
おわりに
これまではDCモータを用いた1軸 姿勢制御モジュールとしてSHISEIGYO-1 DCの製法レシピを販売しておりました。
電流センサによって回転推定ができることがわかり磁気エンコーダが削減され、
モータもダブルシャフトではなく普通のモノが使用できるようになりました。
更にこの度モータドライバDRV8876を採用することで外付けの電流センサも必要がなくなり、部品点数の少ない1軸 DCモータ 姿勢制御モジュールが実現できました。
専用基板を設計して、より親しみやすいDCモータ 1軸 姿勢制御モジュールの製作レシピを完成できればと考えております。
次の記事

関連記事
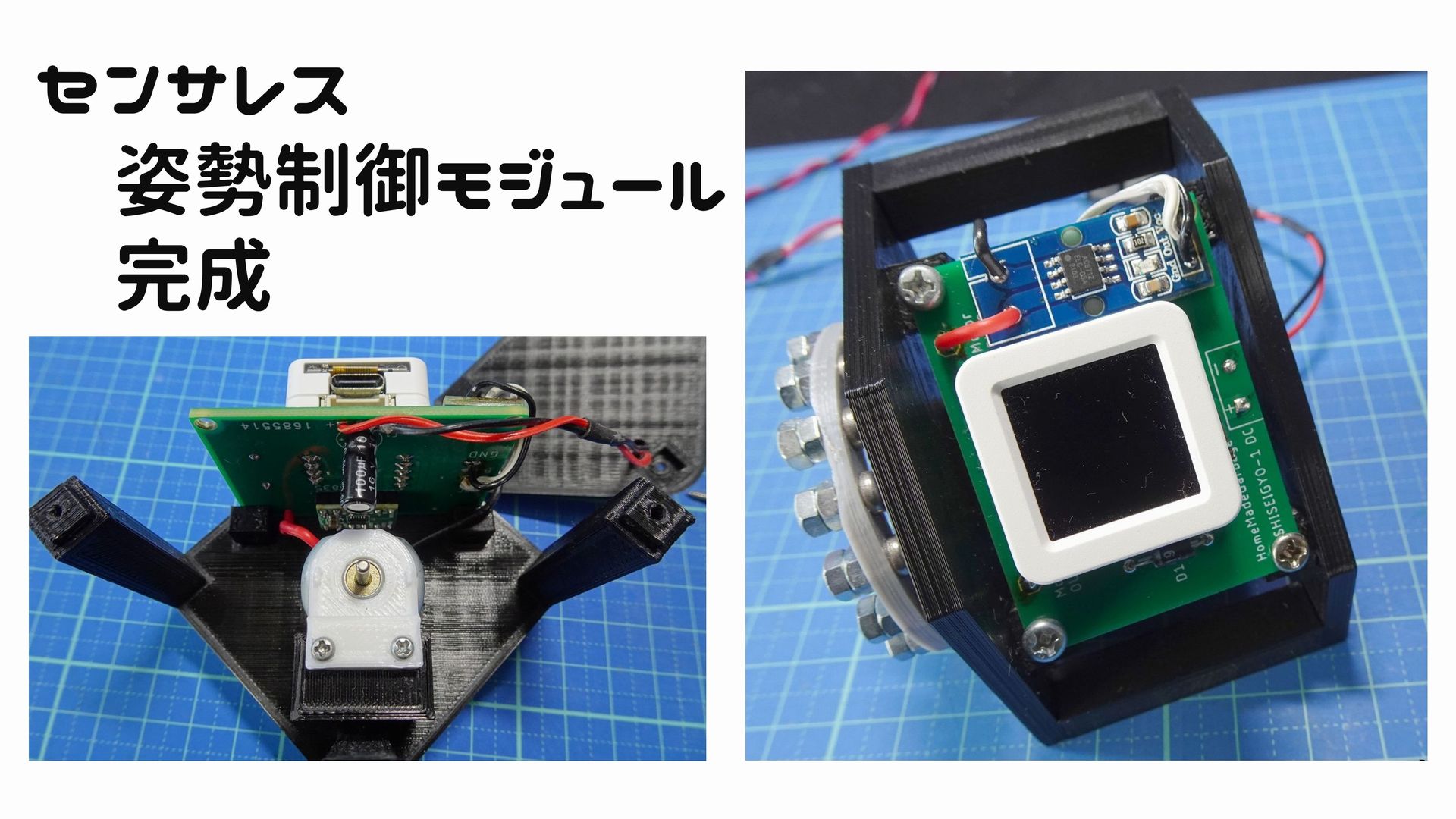 センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
 極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. ーリアクションホイールへの道56ー
極小姿勢制御モジュール SHISEIGYO-1 DC センサレス Jr. ーリアクションホイールへの道56ー
 ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
ATOMS3 で姿勢制御モジュール ーリアクションホイールへの道53ー
 DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
DCモータで姿勢制御 SHISEIGYO-1 DC 爆誕 ーリアクションホイールへの道43ー
 SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
SHISEIGYO-1 DC の改善検討 ーリアクションホイールへの道44ー
 姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
姿勢制御モジュール 4重倒立挑戦 ーリアクションホイールへの道45ー
 姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
姿勢制御モジュール 4重倒立挑戦3 ーリアクションホイールへの道49ー
 姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー
姿勢制御装置とバーサライタの融合 ーリアクションホイールへの道50ー