33日後に2足歩行ロボットを完成させたい俺
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2021 |24日目
これまで2軸の姿勢制御モジュール SHISEIGYO-2を用いて、特殊球体ホイール バランスロボットや一脚 屈伸ロボを製作してまいりました。
— HomeMadeGarbage (@H0meMadeGarbage) December 9, 2021
HomeMadeGarbage Advent Calendar 2021 |10日目
一脚 屈伸ロボ 爆誕#アドベントカレンダー#AdventCalendar #HMG_AdventCalendar2021🔽ブログリンクはコチラhttps://t.co/KQcHlDMOlX pic.twitter.com/GEBtfqVL6d
— HomeMadeGarbage (@H0meMadeGarbage) December 9, 2021
ここではSHISEIGYO-2を用いて2足歩行ロボットの製作に挑戦しましたので報告いたします。
33日以内に製作するという縛りを自分に設けて実施しました。

目次
サーボで足を構築
まずは1脚屈伸ロボを応用してサーボモータでの足製作を検討しました。
1日目
33日後に2足歩行ロボットを完成させたい俺
1日目#33日2足歩行ロボ pic.twitter.com/izToW0jqDM— HomeMadeGarbage (@H0meMadeGarbage) November 22, 2021
一脚 屈伸ロボ でも使用したサーボで片足を構築してみました。
滑り防止のため先はTPUフィラメントで出力しました。
2日目
33日後に2足歩行ロボットを完成させたい俺
2日目#33日2足歩行ロボ pic.twitter.com/hfIXc8Xd6F— HomeMadeGarbage (@H0meMadeGarbage) November 23, 2021
足先がTPUだとフニャフニャ過ぎたのでPLAフィラメントで一体出力することにしました。
サーボはスマホアプリBlynkを用いてBLEで通信して制御しています。
3日目
33日後に2足歩行ロボットを完成させたい俺
3日目#33日2足歩行ロボ pic.twitter.com/2k9qN5VXTb— HomeMadeGarbage (@H0meMadeGarbage) November 24, 2021
もう片方の足用のサーボが届きました。
4日目
33日後に2足歩行ロボットを完成させたい俺
4日目#33日2足歩行ロボ pic.twitter.com/lzoJ7Rsv05— HomeMadeGarbage (@H0meMadeGarbage) November 25, 2021
追加した足の動きもばっちりです。
5日目
33日後に2足歩行ロボットを完成させたい俺
5日目#33日2足歩行ロボ pic.twitter.com/jsinTzAqeC— HomeMadeGarbage (@H0meMadeGarbage) November 26, 2021
両足の動作確認OK。
コントローラにはESP32を使用。
リアクションホイールと連結
リアクションホイール部と製作した足を繋げて倒立動作の実現を目指します。
6日目
33日後に2足歩行ロボットを完成させたい俺
6日目#33日2足歩行ロボ pic.twitter.com/QKvWnRkAcw— HomeMadeGarbage (@H0meMadeGarbage) November 27, 2021
作製した足をリアクションホイール部と接続しました。
問題なく点倒立が実現できました!
7日目
33日後に2足歩行ロボットを完成させたい俺
7日目#33日2足歩行ロボ pic.twitter.com/uP2rjBcS5k— HomeMadeGarbage (@H0meMadeGarbage) November 28, 2021
屈伸運動を確認。
問題ないようです。
8日目
33日後に2足歩行ロボットを完成させたい俺
8日目#33日2足歩行ロボ pic.twitter.com/id0w76AsdH— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2021
片足立ちもできました。
9日目
33日後に2足歩行ロボットを完成させたい俺
9日目#33日2足歩行ロボ pic.twitter.com/rfyIIdeL74— HomeMadeGarbage (@H0meMadeGarbage) November 30, 2021
足踏み動作を作りこみ。
10日目
33日後に2足歩行ロボットを完成させたい俺
10日目#33日2足歩行ロボ pic.twitter.com/PHlc1kc7Pj— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2021
リアクションホイール部と接続しての足踏み。
問題なく動作。
歩行に挑戦
サーボモータによる足での倒立が確認できましたので歩行に挑戦します。
11日目
33日後に2足歩行ロボットを完成させたい俺
11日目#33日2足歩行ロボ pic.twitter.com/5dBjQjvpyj— HomeMadeGarbage (@H0meMadeGarbage) December 2, 2021
前進動作を作りこみ。
12日目
33日後に2足歩行ロボットを完成させたい俺
12日目#33日2足歩行ロボ pic.twitter.com/6WQX0QKfnp— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2021
2足歩行による前進が確認できました!
コードレス化
歩行動作が確認できましたので、制御線や電源線を内蔵化します。
13日目
33日後に2足歩行ロボットを完成させたい俺
13日目#33日2足歩行ロボ pic.twitter.com/Imu9isR6DX— HomeMadeGarbage (@H0meMadeGarbage) December 4, 2021
これまではリアクションホイール部をM5Stack CORE2で制御し、足はESP32の評価ボードで制御していました。
足の制御をM5Stack ATOM Liteに変更しました。
14日目
33日後に2足歩行ロボットを完成させたい俺
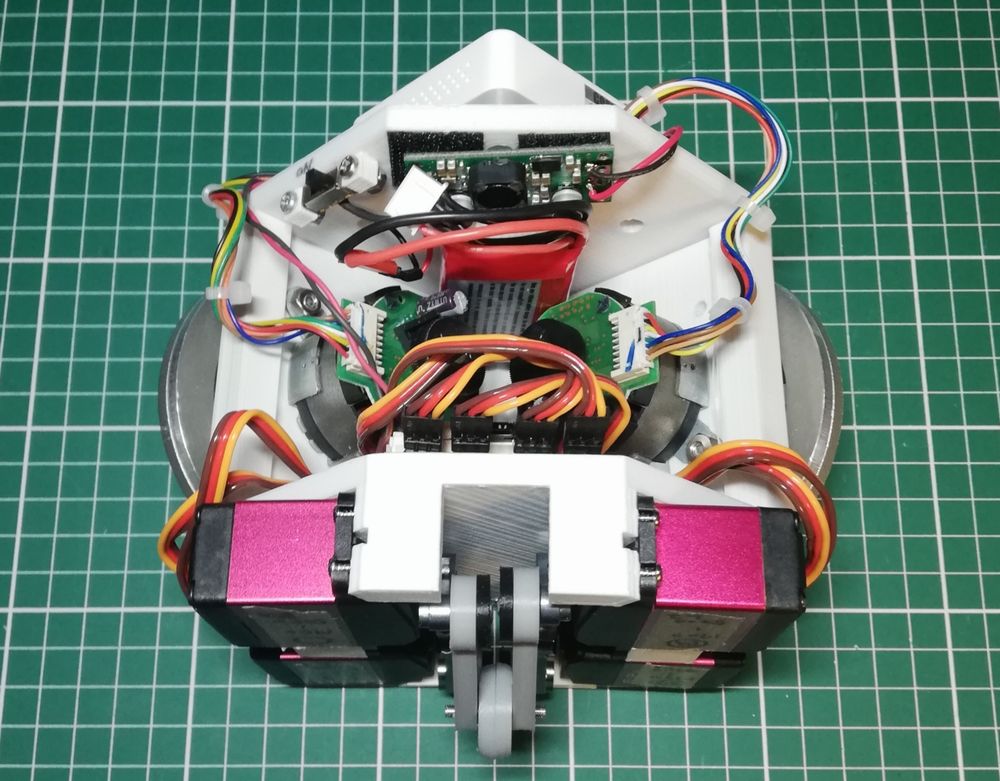
14日目#33日2足歩行ロボ pic.twitter.com/EoFW26ylu4— HomeMadeGarbage (@H0meMadeGarbage) December 5, 2021
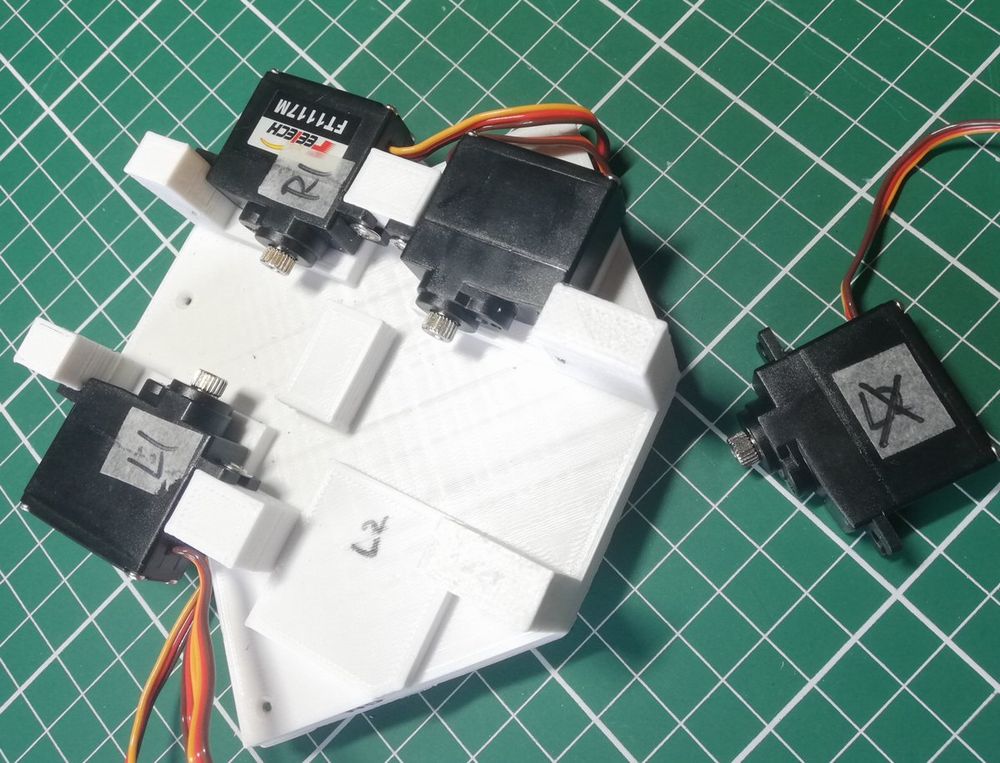
M5Stack ATOM Lite とサーボ配線をユニバーサル基板でまとめて、足部をコンパクトにしました。
15日目
33日後に2足歩行ロボットを完成させたい俺
15日目#33日2足歩行ロボ pic.twitter.com/Q8iUIHxXBm— HomeMadeGarbage (@H0meMadeGarbage) December 6, 2021
リアクションホイール部と結合し動作確認。
問題なし。
16日目
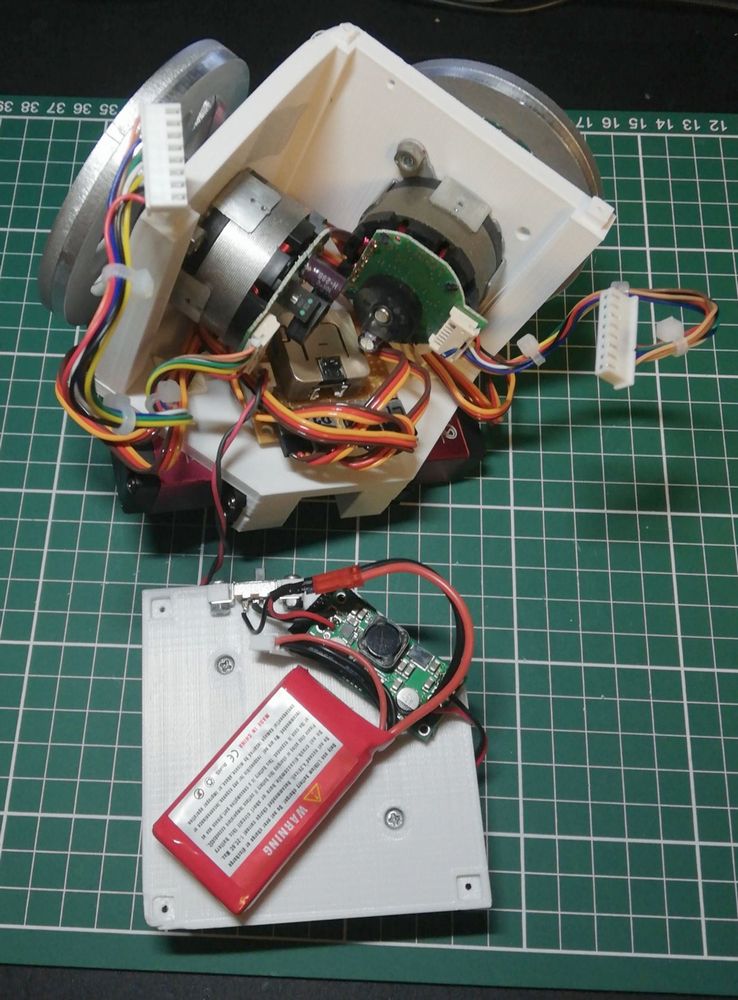

特殊球体ホイール バランスロボットと同様に電源供給をDCDCコンバータとLiPoバッテリで実施します。
- 24V昇圧DCDCコンバータ
- 3セル LiPoバッテリ

17日目
33日後に2足歩行ロボットを完成させたい俺
17日目#33日2足歩行ロボ pic.twitter.com/bzi7lKwOaI— HomeMadeGarbage (@H0meMadeGarbage) December 8, 2021
外部からの電源線や制御線無しで独立動作を実現できました。
歩行検討
歩行動作の詳細検証を実施します。
18日目
33日後に2足歩行ロボットを完成させたい俺
18日目#33日2足歩行ロボ pic.twitter.com/3E46kMlEcc— HomeMadeGarbage (@H0meMadeGarbage) December 9, 2021
後進も確認できました。
19日目
33日後に2足歩行ロボットを完成させたい俺
19日目#33日2足歩行ロボ pic.twitter.com/ReKEgtOiYZ— HomeMadeGarbage (@H0meMadeGarbage) December 10, 2021
歩行スピードを可変にして動作確認。
20日目
33日後に2足歩行ロボットを完成させたい俺
20日目#33日2足歩行ロボ pic.twitter.com/plwGatogyY— HomeMadeGarbage (@H0meMadeGarbage) December 11, 2021
坂道歩行もできちゃいました!
SDGs
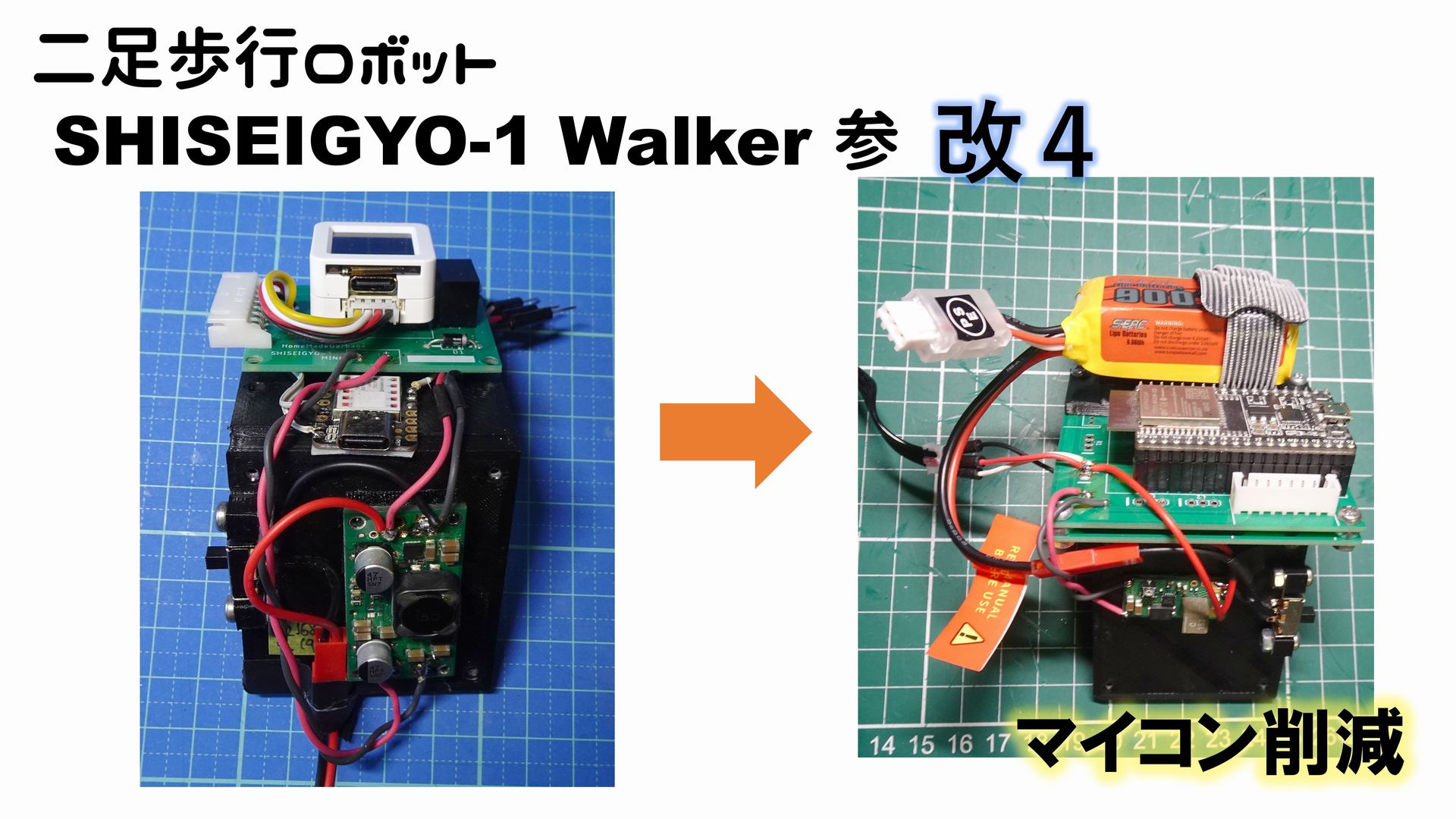
マイコンを2個使っていたり、高トルクのサーボの使用などちょっと贅沢なので部品を再検討しました。
21日目

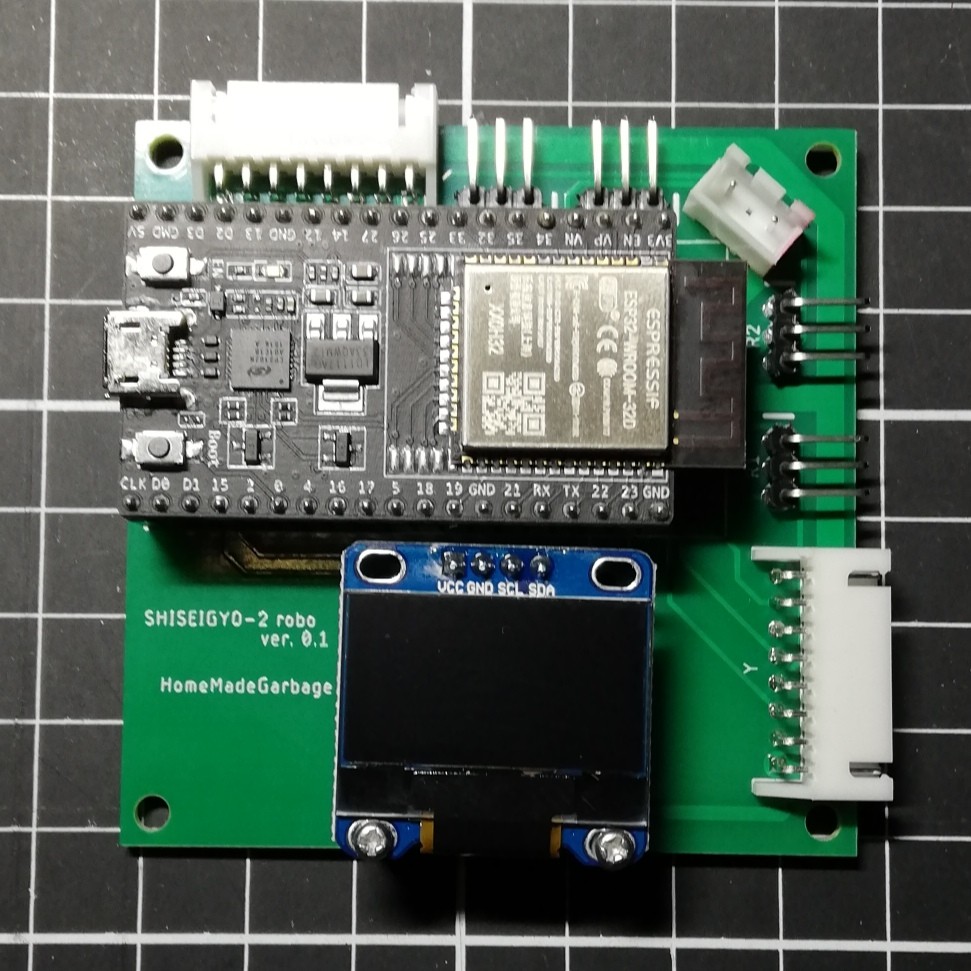
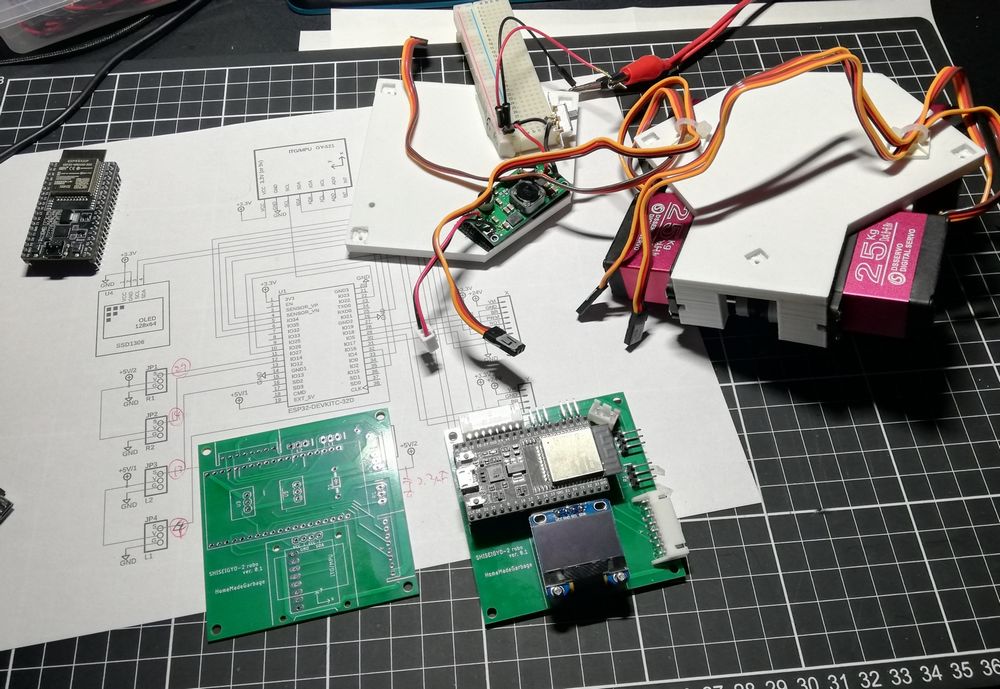
リアクションホイール部と足部でコントローラを分けていたのですが、専用ボードを製作してマイコンを一本化します。
基板は11/30に設計・発注しました。数千円で10日ほどの期間で基板が作れてしまう。
なんてすばらしいことでしょうか。
マイコンとしてESP32の評価ボードを用いてIMUセンサMPU6050とOLEDディスプレイも実装します。
22日目
33日後に2足歩行ロボットを完成させたい俺
22日目#33日2足歩行ロボ pic.twitter.com/F3qsPnY59Z— HomeMadeGarbage (@H0meMadeGarbage) December 13, 2021
新コントローラ基板での動作を確認。
23日目
33日後に2足歩行ロボットを完成させたい俺
23日目#33日2足歩行ロボ pic.twitter.com/SRH8aDpy9s— HomeMadeGarbage (@H0meMadeGarbage) December 14, 2021
サーボを 25kg・cm のものから 3.5 kg・cmのミニサーボ FT1117M に変更してみました。
問題なく動作いたしました。

高級動作検討
完成に向けて、さらに動作に磨きをかけていきます。
24日目
33日後に2足歩行ロボットを完成させたい俺
24日目#33日2足歩行ロボ pic.twitter.com/d12tC9XpQF— HomeMadeGarbage (@H0meMadeGarbage) December 15, 2021
起き上がり動作も確認できました!
25日目
33日後に2足歩行ロボットを完成させたい俺
25日目#33日2足歩行ロボ pic.twitter.com/cFNqJXldSc— HomeMadeGarbage (@H0meMadeGarbage) December 16, 2021
ホイールにカバーも付けて、歩行のスピードも上げて動作確認。
26日目
サーボ1個が軸がブレて高負荷時に異音がするようになったので追加購入しました。
到着までおあずけ。。
27日目
33日後に2足歩行ロボットを完成させたい俺
27日目#33日2足歩行ロボ pic.twitter.com/GJDVkuzUU6— HomeMadeGarbage (@H0meMadeGarbage) December 18, 2021
購入したサーボが届くまで25kg・cmサーボに戻して、動作検証を進めておきます。
左右の旋回が可能になり自由自在に行きたいとこに行けるようになりました。
旋回は片方の足を擦り付けるようにして回っています。
28日目
33日後に2足歩行ロボットを完成させたい俺
28日目#33日2足歩行ロボ pic.twitter.com/cbFU0zU6eJ— HomeMadeGarbage (@H0meMadeGarbage) December 19, 2021
ホイールカバーと試しにニワトリ頭を付けてみました。
ニワトリは以下のモデルの頭を拝借して油性ペンで色付けしてみましたw
https://www.thingiverse.com/thing:832722
29日目
33日後に2足歩行ロボットを完成させたい俺
29日目#33日2足歩行ロボ pic.twitter.com/HF4fw8A1Sh— HomeMadeGarbage (@H0meMadeGarbage) December 20, 2021
購入したサーボが出荷されました。
早く来ーい!
30日目
33日後に2足歩行ロボットを完成させたい俺
30日目#33日2足歩行ロボ pic.twitter.com/iLLoBXnkf0— HomeMadeGarbage (@H0meMadeGarbage) December 21, 2021
サーボ到着!
仕上げ
部品がそろったので仕上げに入ります。
31日目
33日後に2足歩行ロボットを完成させたい俺
31日目#33日2足歩行ロボ pic.twitter.com/3MsKkFwweC— HomeMadeGarbage (@H0meMadeGarbage) December 22, 2021
ミニサーボ FT1117M での足でも旋回動作を確認しました。
縦横無尽に動けます!
32日目
33日後に2足歩行ロボットを完成させたい俺
32日目#33日2足歩行ロボ pic.twitter.com/CXbfESnT7Z— HomeMadeGarbage (@H0meMadeGarbage) December 23, 2021
高速移動も確認!
完成
33日目
33日後に2足歩行ロボットを完成させたい俺
33日目#33日2足歩行ロボ pic.twitter.com/ikBUHUmqxa— HomeMadeGarbage (@H0meMadeGarbage) December 24, 2021
2足歩行ロボットと私
電子工作を趣味でやるようになってから結構経ちますが、
2足歩行ロボットを作るなんて夢のまた夢な状況でございました。
予算尽きて足しかできなかった。。。#ロボット製作 #Blynk pic.twitter.com/rC60Zww9sC
— HomeMadeGarbage (@H0meMadeGarbage) May 23, 2019
2足歩行ロボットに着手しだしたのは約半年前から
【ロボットくん完成】
皆さんこんにちは!
ロボットくんです。これからマスターと共に様々な動作を学びたい所存です。
宜しくネ#とってもロボットくん
予算1万円でつくる二足歩行ロボット (I/O BOOKS) を Amazon でチェック! https://t.co/JZIpfg4CRO pic.twitter.com/WBdlh3TWWX
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2021
以下の書籍を参考に自分なりにアレンジして、自身と2足歩行ロボットとの距離を詰めてまいりました。
ここでの研究で気づいたのは、2足歩行ロボットは足を大きく重くして重心をそれなりに制御すればそこそこ歩けるということです。
歩行訓練
足が大きいので結構何とかなる
もう少しだけ足の底重たくしたいな#とってもロボットくん pic.twitter.com/9wAdBmt0Pb— HomeMadeGarbage (@H0meMadeGarbage) July 27, 2021
実際、書籍の歩行プログラムそのままで上手に歩けています。
おお!歩いた歩いた
予算1万円でつくる二足歩行ロボット (I/O BOOKS) を Amazon でチェック! https://t.co/JZIpfg4CRO pic.twitter.com/7kiAwakwet
— HomeMadeGarbage (@H0meMadeGarbage) June 18, 2021
あとは人間のように自然に歩くにはサーボやセンサを増やして、自由度と感度を増やしていく方向になるかと思います。
2足歩行ロボットの歩行理論なんかも成熟しているかと存じます。
私がそこにお金をかけたところで理論を理解して人間のようなロボットを作れる確証は全くございません
(トラ技あたりが特集組んでくれればワンチャンあるかもしれないけど、今はとにかく専門書を読む気にはなれない)。
そこで、今回のようにリアクションホイールを用いた2足歩行ロボットの製作に至りました。
SHISEIGYO-2によるオートバランスシステムはすでにSHISEIGYO-2 Goや屈伸ロボで確証済みでしたので、かなり実現確度が高いと踏んでおりました。
今後は足の高さや自由度の向上と考えております。
33日間でここまでやれました。333日、3333日と積み上げればドンドン進化するはずです。
とにかく継続
エンジニアリングは継続と好奇心であると思っております。
所感
#33日2足歩行ロボ をやってみて良かったです。
実際に思い描いた面白いモノができたことも当然良かったのですが、
ツイッターでの反応がとても良かったことも大変驚き 多くの喜びを得ることができました。
説明なく始めて説明なく淡々と動画や画像をあげるだけという実験的な試みであったので、どうなることかと思っていましたが うまくいってとにかく良かったです。
Twitterフォロワーもこの試みによって1300名以上増えました。
ありがたいことです。思いついたら なんでもやってみるものだなと改めて思いました。
あとこのロボットの名前は “SHISEIGYO-2 Walker” と命名いたします。
さて次は33日後に何を完成させようかしら
追記
2021/12/10
ねとらぼ様に取り上げていただきました。