
一脚 屈伸ロボ 爆誕
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2021 |10日目
SHISEIGYO-2 Go 弐を応用して1脚ロボットを製作いたしましたので報告します。
目次
サーボテスト
手元にトルクの大きいサーボがありましたのでロボット足に使用できるのではとテスト
強い
25kg高トルク メタルギア デジタルサーボメタルケース防水サーボ RCカー ロボット 用 (180°の操作角度) https://t.co/6gy0lHneOl pic.twitter.com/ZbwEbQ3RpW
— HomeMadeGarbage (@H0meMadeGarbage) November 12, 2021
アルミのアームも付いて力強くていい感じだったのでもう1個買って検証
あら いいですねぇ
25kg高トルク メタルギア デジタルサーボメタルケース防水サーボ RCカー ロボット 用 (180°の操作角度) https://t.co/6gy0lHneOl pic.twitter.com/G3gfoQD0kV pic.twitter.com/x8rHi328dW
— HomeMadeGarbage (@H0meMadeGarbage) November 13, 2021
なんだかいい感じ♪
このサーボで足を構築することにいたしました。
足構築
3Dプリンタでひざ下部 (素材: PLAフィラメント) を作製し、足先は滑り防止を兼ねてTPUフィラメントで構成しました。
屈伸#3Dプリント #サーボモータ pic.twitter.com/SlIkIqMdai
— HomeMadeGarbage (@H0meMadeGarbage) November 13, 2021
いい感じの屈伸運動です。
一脚ロボ 検証
SHISEIGYO-2 のリアクションホイールを合体させました。
ホイールはそれぞれ2枚重ねにしてトルクを増強しています。
こりゃまた忙しくなるぞ#M5Stack #ReactionWheel pic.twitter.com/yd7nUC8vev
— HomeMadeGarbage (@H0meMadeGarbage) November 14, 2021
屈伸動作検証
リアクションホイールによる姿勢制御のゲイン調整を施して比較的安定した屈伸運動が実現できました。
リアクションホイールの制御ゲイン調整で安定倒立はクリア
やはり足を高くすると転ぶ
試作ではサーボを別マイコン(ESP32)で制御してるけど
M5Stack Core2 にマージの際に
足の高さを制御ゲインにフィードバックしないといけんね pic.twitter.com/DuCXZOz5dE— HomeMadeGarbage (@H0meMadeGarbage) November 15, 2021
足を延ばしすぎたり、急な高さ変動にはまだ追従できていません。
屈伸1点倒立ロボ
中間高さで制御ゲイン合わせてみたけど
高くすると転ぶやはり高さによって制御ゲインを可変にするべきだ#電子工作 pic.twitter.com/Eu6PZfF2PI
— HomeMadeGarbage (@H0meMadeGarbage) November 15, 2021
起き上がり機能追加
リアクションホイールの回転制御による自立も実現できました。
初期姿勢を低く調整
これにより自立も可能に
高い時の倒立制御ゲイン調整は相変わらず必要そう#M5Stack #サーボモータ #ReactionWheel pic.twitter.com/GwpWkNMxhW— HomeMadeGarbage (@H0meMadeGarbage) November 16, 2021
完成
リアクションホイールと足は別マイコンで検証していましたが、
M5Stack CORE2ひとつでの制御にまとめました。
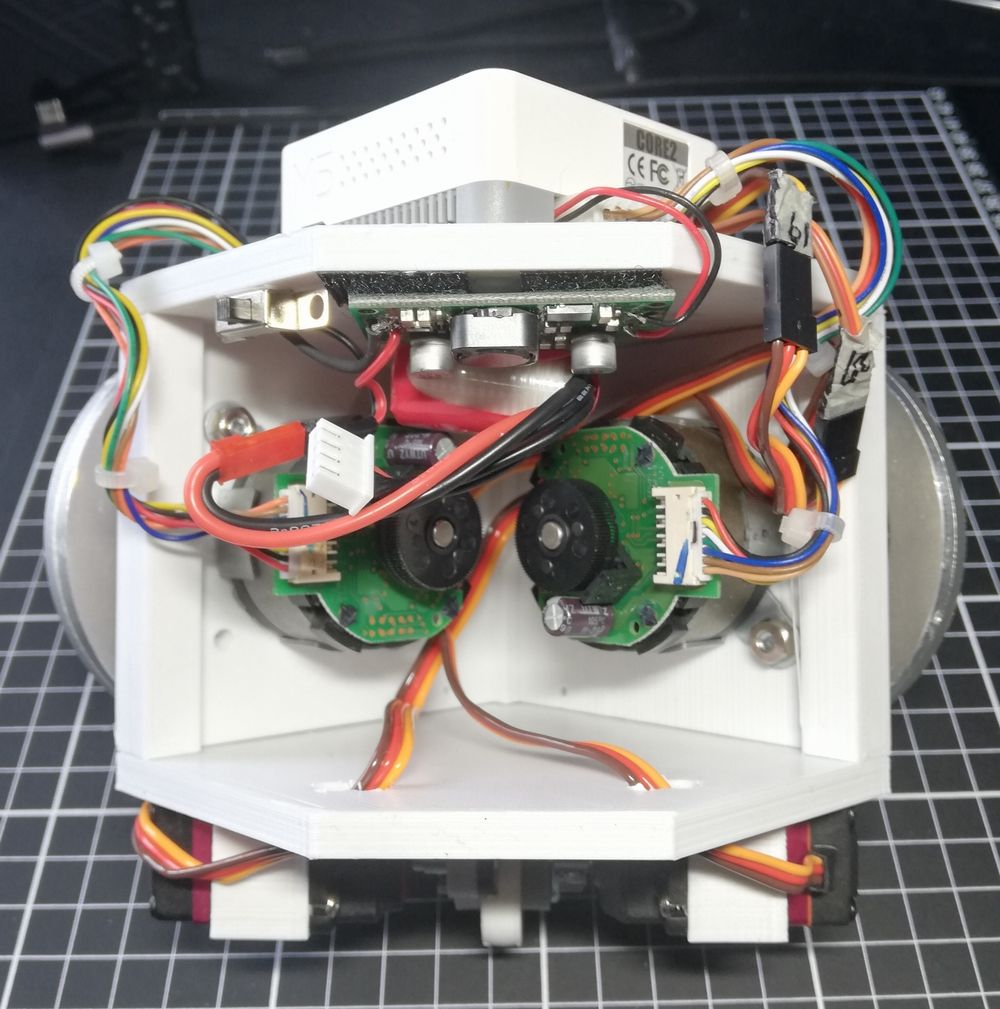
構成はSHISEIGYO-2 Go 弐 とほぼ同様で球体駆動用360度連続回転サーボが足用サーボになっただけです。
おまけ
開発途中で一脚ロボをAgility Roboticsのロボットと比較してみました 😆
workout
But the difference is clear yet..#AgilityRobotics #HomeMadeGarbage pic.twitter.com/HrwFyvYpRS— HomeMadeGarbage (@H0meMadeGarbage) November 15, 2021

関連記事
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
 SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
SHISEIGYO-2 Go ホイール検討 球状歯車を味見 ーリアクションホイールへの道40ー
 特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
特殊球体ホイール バランスロボット SHISEIGYO-2 Go 弐
 3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 爆誕 ーリアクションホイールへの道30ー
 2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
2軸 姿勢制御モジュール SHISEIGYO-CORE2 完成 ーリアクションホイールへの道31ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー