3軸 姿勢制御モジュール SHISEIGYO-3 起き上がり点倒立達成 ーリアクションホイールへの道24ー
本記事にはアフィリエイト広告が含まれます。
HomeMadeGarbage Advent Calendar 2020 |3日目
前回は倒立メソッドを確立し安定した点倒立実現の可能性を見出すことができました。
ここではいよいよ起き上がり点倒立を目指します。
目次
ディスプレイ搭載
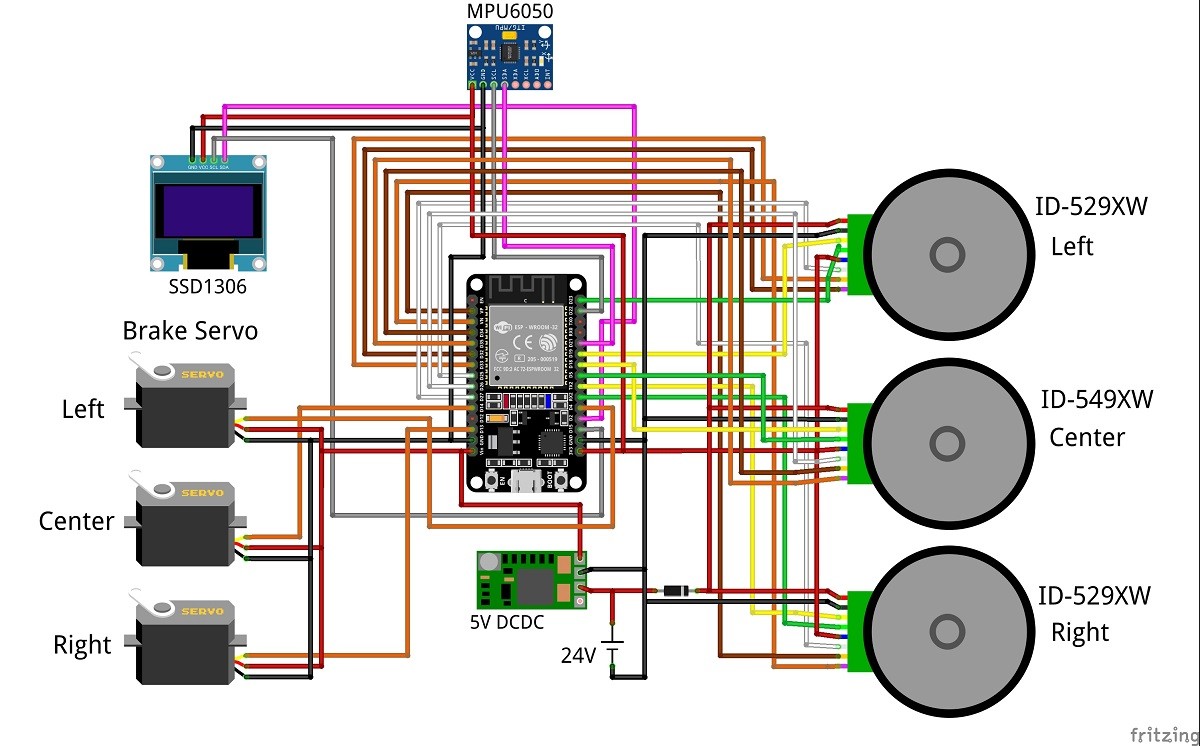
マイコンにESP32を使用しており、味気ないのでI2Cディスプレイを追加実装しました。
以下のディスプレイを使用しました。
上部(y = 0~15)がイエローで下部(y = 16~63)がブルーで表示されます。
あ。。。これ2色自由に出せるわけじゃなく
上部が黄色で下部が青なのね。。 pic.twitter.com/O4MAe8FJPm— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2020
ライブラリは以下を使用しました。
https://github.com/adafruit/Adafruit_SSD1306
構成
ディスプレイ表示をデュアルタスクの別コアで処理するために、6軸センサMPU6050とは違うI2Cピンを設定して接続しました。
動作
各モータの姿勢角や各傾きをインジケータで表示するようにしました。
ディスプレイ付けた。
やっぱ便利#ESP32 #リアクションホイールへの道EasyWordMall iic i2c OLEDモジュールを Amazon でチェック! https://t.co/lgDGiN7NZl pic.twitter.com/QQ5FHMHgfy
— HomeMadeGarbage (@H0meMadeGarbage) November 29, 2020
参考
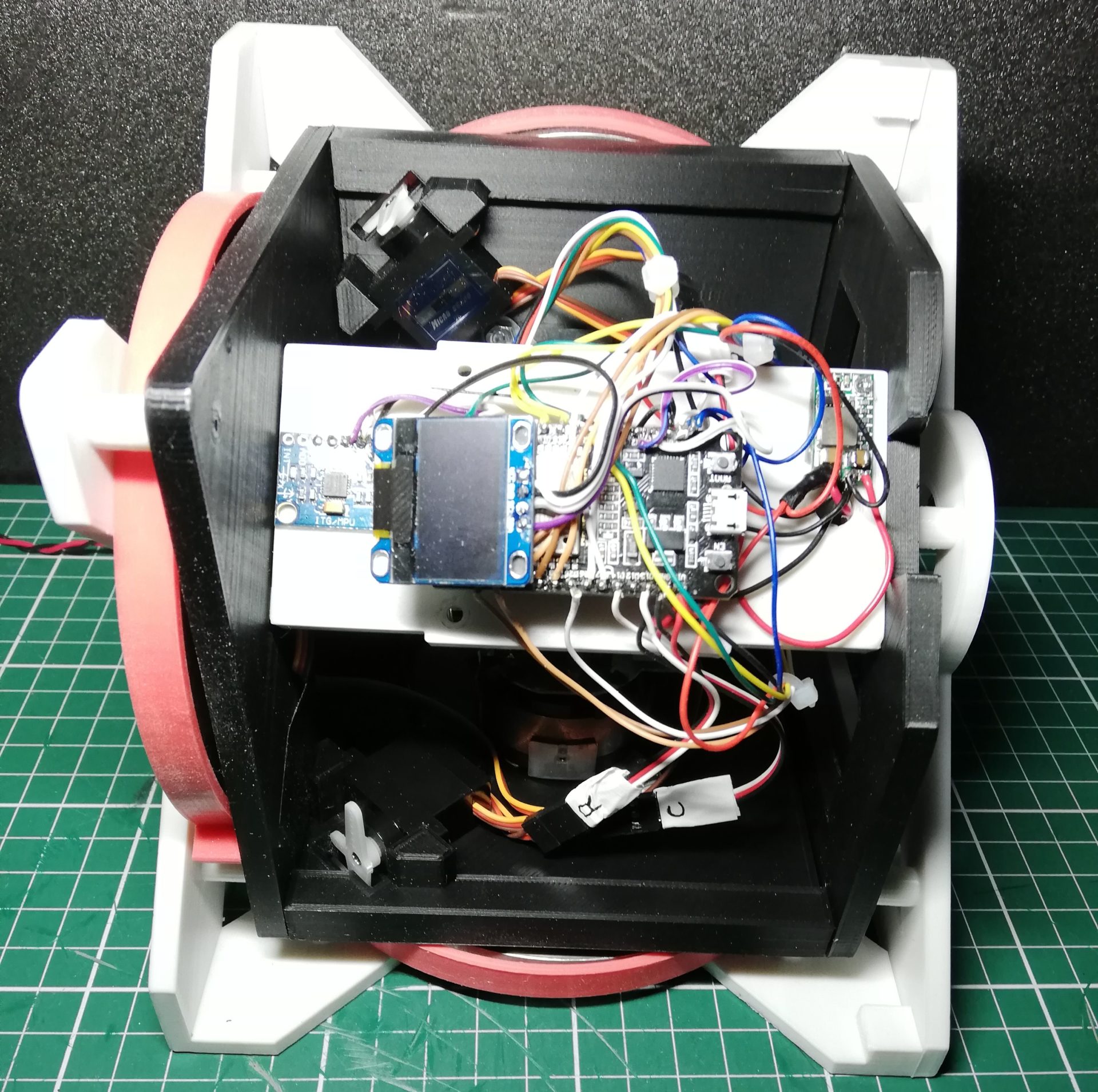
ブレーキ追加
センターのホイールのブレーキと同様に、TPUフィラメントによるバンドブレーキを両サイドのホイールにも追加しました。
サイドブレーキ付けた
さてどうなる。#リアクションホイールへの道#姿勢制御モジュール pic.twitter.com/BDXChvc2NP
— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2020
マイクロサーボで引っ張っています。
動作
辺倒立後に、サイドの両ホイールを起き上がる方向に徐々に高速回転させて
ブレーキをかけて起き上げます。
【すくすく日誌】
可能性を感じますね。#リアクションホイールへの道#マジで可愛いね pic.twitter.com/NQCFfTGJHe— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2020
やはり難しいね。
でも不可能ではなさそう#リアクションホイールへの道#ESP32 #姿勢制御モジュール#電子工作 pic.twitter.com/O1iEEfpdg2— HomeMadeGarbage (@H0meMadeGarbage) December 1, 2020
やはりなかなか難しいです。。。もろもろ調整して起き上がり点倒立を目指します。
【すくすく日誌】
頑張れもう少しだ!#リアクションホイールへの道#可愛いと思ったらRT pic.twitter.com/M28O2YhzUS— HomeMadeGarbage (@H0meMadeGarbage) December 2, 2020
ホイールの最高速度やブレーキ解除時間や倒立時のフィードバック係数など各種パラメータを調整する必要があるので非常に難しいです。。
現代制御が分からないので古典制御でゴリゴリフィードバック係数いじって調整しています。。。
以下のようにスマホアプリBlynk を用いてESP32とBLE通信してパラメータ調整しました。

実現!!
まだ確度や倒立の安定性は低いですが、ついに起き上がり点倒立が実現できました!!
おわりに
できるかどうかもわからない状態から遂にここまで来ることができました!
今後は起き上がりの確度と点倒立時の安定性の向上を目指します。
最終的にはSHISEIGYO-1と同様に皆さんのご家庭でも楽しめるレシピにして提供できればと考えております。
それでは次の道で!
NGシーン
ジャッキーチェン映画のエンディングのNGシーン pic.twitter.com/hbUWAlNAG6
— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2020
ジャッキーチェン映画のエンディングのNGシーン2 pic.twitter.com/qqDaipEYeV
— HomeMadeGarbage (@H0meMadeGarbage) December 3, 2020
まだ点倒立が完全に安定してないのでOKもNGもないのだが。。
次の記事

関連記事
 3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
3軸 姿勢制御モジュール SHISEIGYO-3 ESP32とMPU6050の使用 ーリアクションホイールへの道22ー
 3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
3軸 姿勢制御モジュール SHISEIGYO-3 安定点倒立メソッドの確立 ーリアクションホイールへの道23ー
 一脚 屈伸ロボ 爆誕
一脚 屈伸ロボ 爆誕
 3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
3軸 姿勢制御モジュール SHISEIGYO-3 への挑戦そして挫折 ーリアクションホイールへの道16ー
 3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
3軸 姿勢制御モジュール SHISEIGYO-3 点倒立の実現 ーリアクションホイールへの道17ー
 SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
SHISEIGYO-2 を改良しました ーリアクションホイールへの道36ー
 SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
SHISEIGYO-2 Go 爆誕 ーリアクションホイールへの道39ー
 SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー
SHISEIGYO-2 Go 球体ホイールを検討 ーリアクションホイールへの道41ー